


Actionneur à joint à arbre creux Ti5 Robot CRA-RI60-70-PRO-S-XX, 24-48 V CAN/EtherCAT, IP65, 51-102:1, jusqu'à 66 N·m en crête, option de frein -B
Actionneur à joint à arbre creux Ti5 Robot CRA-RI60-70-PRO-S-XX, 24-48 V CAN/EtherCAT, IP65, 51-102:1, jusqu'à 66 N·m en crête, option de frein -B
Ti5 Robot
Impossible de charger la disponibilité du service de retrait
Aperçu
Le Robot Ti5 Le CRA-RI60-70-PRO-S-XX est une articulation robotique intégrée compacte à arbre creux pour bras, humanoïdes, exosquelettes, mécanismes de drones et plateformes mobiles. Il intègre un moteur couple BLDC sans cadre, un réducteur de précision, un codeur absolu magnétique (simple ou double) et une interface d'entraînement dans un module IP65. L'architecture PRO-S privilégie la miniaturisation et une réponse dynamique rapide, tout en conservant un rapport charge/poids élevé. La communication est assurée par défaut par CAN, avec EtherCAT disponible. Une version de frein d'usine « -B » ajoute un frein de maintien pour la sécurité en cas de coupure d'alimentation. (Toutes les valeurs ci-dessous sont issues des fiches techniques et des captures d'écran du produit.)
Caractéristiques principales
-
Module de joint compact à arbre creux (série Ø60/Ø70) pour un acheminement facile des câbles et des pneumatiques
-
Rapports 51, 81, 101, 102 avec faible jeu (jusqu'à 10 secondes d'arc selon le rapport)
-
Couple maximal jusqu'à 66 N·m ; couple nominal jusqu'à 30 N·m (condition de 2 000 tr/min/rapport)
-
Réponse rapide ; conception à rapport charge/poids élevé (≈0,69 kg standard/≈0,84 kg avec frein)
-
Boîtier étanche à la poussière et à l'eau IP65, structure en aluminium
-
Codeur absolu magnétique, 17 bits ; options de codeur simple ou double
-
Alimentation 24–48 V CC, bus CAN (EtherCAT en option) ; arbre traversant Ø 18 mm
-
La variante « -B » ajoute un frein de coupure de courant ; un corps plus long et une inertie plus élevée pour le maintien
Caractéristiques
Électrique commun & mécanique
-
Puissance du moteur : 300 W
-
Tension d'alimentation : 24–48 V CC
-
Courant continu maximal : 6,7 A ; Courant nominal : 5 A ; Résistance de phase : 0,33 Ω
-
Constante de couple : 0,096 N·m/A ; Inductance : 0,074 mH ; Paires de pôles : 10
-
Codeur : magnétique absolu, 17 bits ; sélectionnable simple/double
-
Communication : CAN (EtherCAT en option)
-
Alésage traversant : 18 mm ; Protection : IP65
Par rapport de démultiplication (CRA-RI60-70-PRO-S-XX)
| Rapport | Couple maximal de démarrage/arrêt (N·m) | Couple continu/moyen maximal (N·m) | Couple nominal à 2 000 tr/min/ratio (N·m) | Vitesse de sortie maximale (tr/min) | Vitesse nominale à ½ couple nominal (tr/min) | Contrecoup (arcsec) |
|---|---|---|---|---|---|---|
| 51 | 42 | 32 | 19,8 | 82 | 68 | 20 |
| 81 | 53 | 33 | 27,5 | 51 | 43 | 20 |
| 101 | 66 | 49 | 30 | 41 | 34 | 10 |
| 102 | 66 | 49 | 30 | 32 | 24 | 10 |
Facteur de forme & inertie
-
Norme (-XX) : longueur 70,7 ± 0,5 mm ; poids 0,69 kg ; inertie du rotor 382 g·cm²
-
Avec frein (-XX-B) : longueur 89,7 ± 0,5 mm; poids 0.84 kg ; inertie du rotor 538 g·cm²
Autres données du catalogue
-
Valeur de référence du couple nominal : 30 N·m
-
Vitesse nominale typique : 30 tr/min (en fonction du rapport)
-
Température de fonctionnement : jusqu'à 60 °C
-
Montage : montage à vis ; interface d'arbre clavetée
Remarques : Le codeur simple/double, l'option de freinage et le type de bus sont sélectionnables à la commande ; EtherCAT est indiqué par « Ether-cat » dans les captures d'écran. Toutes les dimensions et valeurs nominales ci-dessus sont tirées directement des fiches techniques fournies pour les CRA-RI60-70-PRO-S-XX et CRA-RI60-70-PRO-S-XX-B.
Applications
-
Bras robotisés collaboratifs et industriels à 6 axes
-
Articulations humanoïdes (épaule, coude, hanche, genou)
-
Exosquelettes et dispositifs de rééducation
-
Cardans/mécanismes de drones et manipulateurs légers
-
Mécanismes AGV/AMR, petites machines-outils et automatisation de laboratoire
Détails
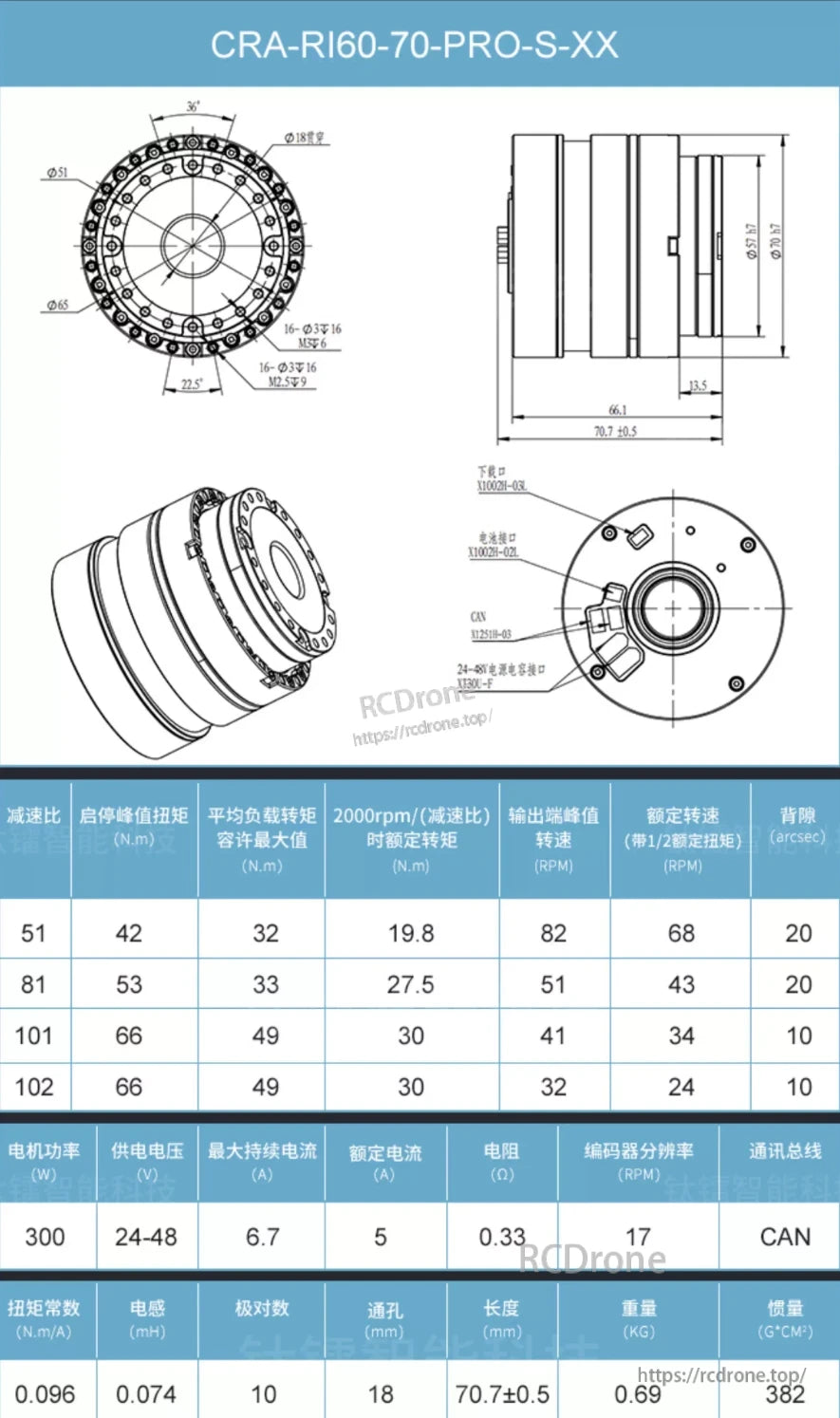
Spécifications de l'actionneur CRA-RI60-70-PRO-S-XX : moteur 300 W, 24-48 V, courant nominal 5 A, résolution d'encodeur 17 tr/min, communication CAN, poids de 0,69 kg, inertie de 382 G·CM², rapports de démultiplication multiples avec données de couple et de vitesse.

Caractéristiques de l'actionneur CRA-RI60-70-PRO-S-XX-B : moteur 300 W, 24-48 V, courant nominal 5 A, résistance 0,33 Ω, résolution du codeur 17 tr/min, bus CAN, poids 0,84 kg, inertie 538 G·cm². Dimensions : longueur 89,7 ± 0,5 mm, diamètre 70,37 mm.
Related Collections


