Module d'articulation de robot intégré Ti5 Robot CRA-RI60-80-PRO-XX — Entraînement harmonique, 24-48 V, CAN/EtherCAT, encodeur 17 bits
Module d'articulation de robot intégré Ti5 Robot CRA-RI60-80-PRO-XX — Entraînement harmonique, 24-48 V, CAN/EtherCAT, encodeur 17 bits
Ti5 Robot
Impossible de charger la disponibilité du service de retrait
Aperçu
Le robot Ti5 CRA-RI60-80-PRO-XX est une articulation intégrée compacte à arbre creux pour humanoïdes, cobots et manipulateurs mobiles. Elle combine une réducteur d'harmoniques ultra-mince, moteur couple sans cadre, Servomoteur FOC, et codeur magnétique absolu dans un seul module, livrant sortie à jeu quasi nul, faible bruit et densité de couple élevée. Le joint supporte PEUT ou EtherCAT, encodeurs simples ou doubles, et un frein de maintien en option. Deux longueurs sont disponibles : le PRO-XX standard et le PRO-XX étendu PRO-XX-B (corps plus long, inertie du rotor plus élevée, trou traversant plus grand).
Caractéristiques principales
-
Joint tout-en-un: réducteur d'harmoniques + moteur couple + driver FOC + codeur absolu.
-
Contrecoup quasi nul à la sortie ; contrôle doux à basse vitesse et faible bruit acoustique.
-
Conception d'arbre creux pour passage de câbles/voies aériennes ; rapports de réduction multiples.
-
Codeur absolu, 17 bits, mémoire de position en cas de panne de courant ; en option double encodeur version.
-
Communication: PEUT ou EtherCAT sélectionnable.
-
Pouvoir: 24–48 V, driver intégré, classe de puissance du moteur 300 W.
-
Frein de maintien en option; IP/étanche & basse température personnalisation disponible.
-
Prêt à être utilisé pour cardans, humanoïdes, cobots, équipements industriels, robots de patrouille et appareils marins.
Caractéristiques
Électrique & Contrôle (partagé par PRO-XX/PRO-XX-B)
-
Puissance nominale du moteur : 300 W
-
Tension d'alimentation: 24–48 V CC
-
Courant continu maximal : 6,7 A; courant nominal : 5 A
-
Résistance de phase : 0,33 Ω
-
Constante de couple : 0,096 N·m/A
-
Inductance: 0,074 mH
-
Paires de pôles : 10
-
Encodeur: 17 bits absolus; options d'encodeur simple/double
-
Bus: PEUT (standard) ou EtherCAT (option)
Mécanique (arbre creux)
-
Trou traversant (PRO-XX) : Ø15 mm
-
Trou traversant (PRO-XX-B) : Ø18 mm
-
Longueur (PRO-XX) : 70,4 ± 0,5 mm; poids ≈1,01 kg; inertie du rotor ≈441 g·cm²
-
Longueur (PRO-XX-B) : 92,9 ± 0,5 mm; poids ≈1,17 kg; inertie du rotor ≈595 g·cm²
-
Montage : cercle de boulonnage en face avant (sortie creuse) ; réducteur d'harmoniques intégré
-
Options : frein de maintien ; encodeur simple/double ; CAN/EtherCAT ; étanchéité & package basse température
Options de réduction & performance (côté sortie)
Contrecoup : aussi faible que 10–20 secondes d'arc en fonction du ratio.
| Rapport de réduction | Couple maximal de démarrage/arrêt (N·m) | Couple de charge moyen maximal (N·m) | Couple nominal à 2 000 tr/min/rapport (N·m) | Vitesse de pointe (tr/min) | Vitesse nominale à ½ couple nominal (tr/min) | Contrecoup (arcsec) |
|---|---|---|---|---|---|---|
| 51:1 | 42 | 32 | 19,8 | 82 | 68 | 20 |
| 81:1 | 53 | 33 | 27,5 | 51 | 43 | 20 |
| 101:1 | 66 | 49 | 30 | 41 | 34 | 10 |
| 121:1 | 66 | 49 | 30 | 32 | 24 | 10 |
Remarques :
• Les données ci-dessus sont lues à partir des fiches produits pour CRA-RI60-80-PRO-XX et PRO-XX-B.
• PRO-XX-B partage le même tableau couple/vitesse ; il offre un trou traversant plus grand et une inertie plus élevée avec le corps plus long.
Applications
-
Humanoïde &et robots de service:articulations de l'épaule, du coude, de la hanche, du genou, de la cheville avec une densité de couple élevée.
-
Bras robotisés collaboratifs: axes précis à faible jeu pour un contrôle de la force en douceur.
-
Cardan &unités panoramiques et inclinables:Suivi silencieux et stable à basse vitesse avec mémoire de position absolue.
-
Équipement industriel &et manipulateurs AGV/AMR: actionnement intégré compact pour les espaces restreints.
-
Robots de patrouille et d'inspection de puissance; appareils marins/de bord (avec option étanche).
Détails
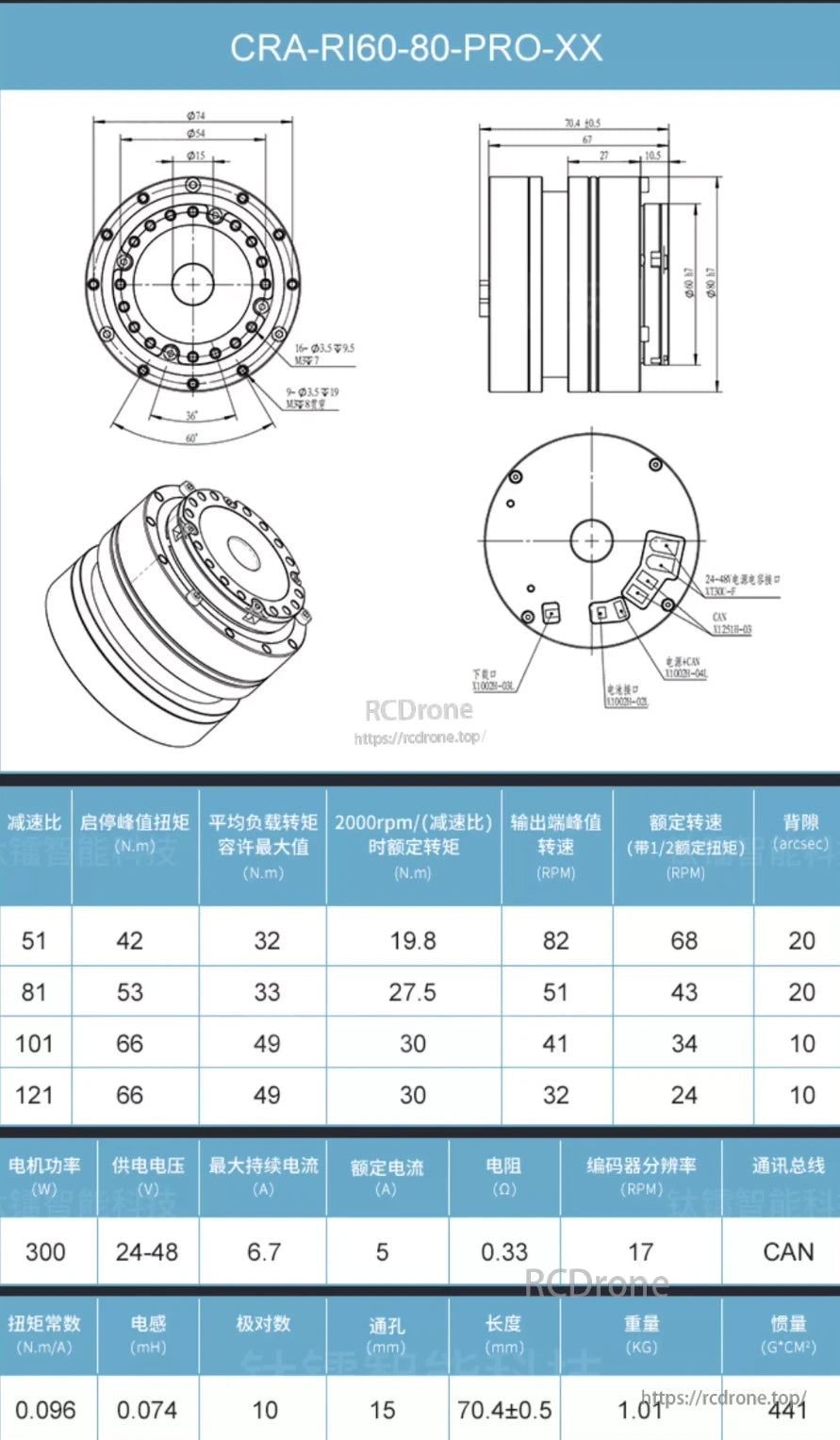
Spécifications du module d'articulation robotique CRA-RI60-80-PRO-XX : moteur 300 W, entrée 24-48 V, bus CAN, encodeur 17 CPR, longueur 70,4 mm, poids 1,01 kg, plusieurs rapports de démultiplication avec données de couple et de vitesse fournies.
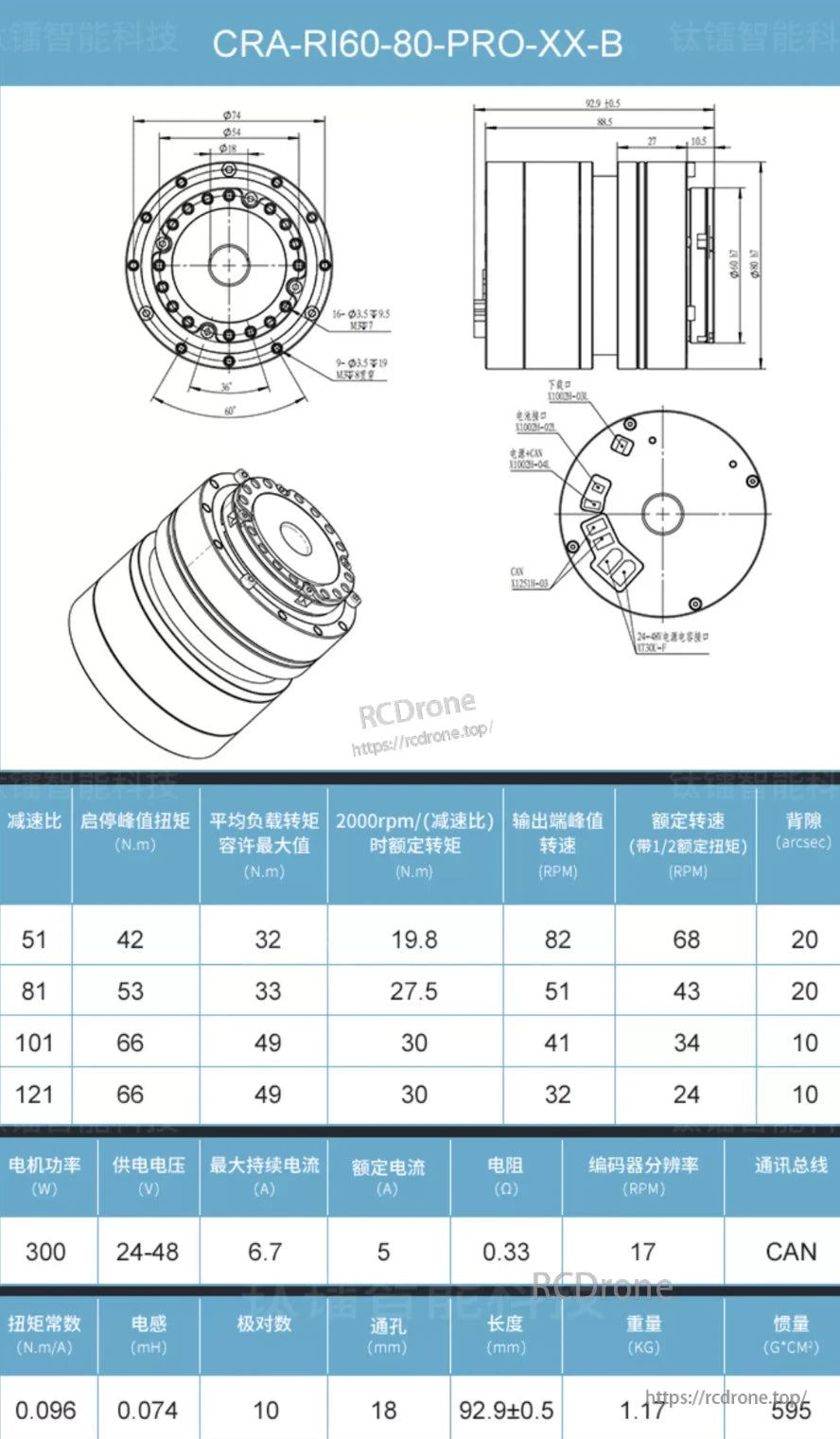
Module d'articulation robotique CRA-RI60-80-PRO-XX-B avec moteur de 300 W, alimentation 24-48 V, communication CAN, résolution d'encodeur de 17 tr/min et plusieurs rapports de démultiplication. Caractéristiques clés : couple, vitesse, courant et dimensions.
Related Collections