


TLIBOT TSJA17 - Harmonique 50/80/100/120, 20-31 Nm, 48 V, 3000 tr/min, EtherCAT/CAN - Moteur robotique pour articulations robotiques
TLIBOT TSJA17 - Harmonique 50/80/100/120, 20-31 Nm, 48 V, 3000 tr/min, EtherCAT/CAN - Moteur robotique pour articulations robotiques
TLIBOT
Impossible de charger la disponibilité du service de retrait
Aperçu
TLIBOT TSJA17 est un moteur robot compact intégrant une articulation à entraînement harmonique, des encodeurs absolus haute résolution, une interface de bus de terrain et un frein électromagnétique pour un mouvement robotique précis. Il prend en charge plusieurs rapports de réduction harmonique et offre une densité de couple élevée pour des mécanismes robotiques légers et des robots collaboratifs.
Caractéristiques clés
- Options de rapport de réduction harmonique : 50 / 80 / 100 / 120.
- Couple nominal : 20 / 28 / 31 / 31 Nm ; couple de pointe pour le démarrage/l'arrêt : 44 / 56 / 70 / 70 Nm.
- Couple de charge moyen maximal autorisé : 34 / 35 / 51 / 51 Nm ; couple maximal instantané autorisé : 91 / 113 / 143 / 112 Nm.
- Vitesse de rotation maximale à l'extrémité de sortie : 60 / 37,5 / 30 / 25 RPM.
- Vitesse nominale du moteur : 3000 RPM ; vitesse instantanée de pointe du moteur : 4500 RPM.
- Tension nominale : 48 V ; poids : 0,68 kg.
- Encodeurs : absolu à 19 bits à tour unique (sans batterie) à la sortie ; absolu ST à 19 bits (multi-tour via sortie, sans batterie) à l'entrée.
- Options de bus de terrain : EtherCAT / CAN / CAN FD.
- Frein électromagnétique intégré à pignon.
- Selon les images du produit : structure de joint classée IP54 avec rotation continue à 360° ; adaptée pour des bras légers dans la classe de charge utile de 5 à 10 kg, portée de 500 à 1000 mm.
- Méthode de montage axial illustrée pour l'intégration de la coque (voir le document d'installation).
Pour un support pré-vente ou technique, contactez https://rcdrone.top/ ou [email protected].
Spécifications
| Paramètre | Valeur |
|---|---|
| Ratio de réduction harmonique | 50 / 80 / 100 / 120 |
| Couple nominal (Nm) | 20 / 28 / 31 / 31 |
| Couple de pointe pour le démarrage et l'arrêt autorisé (Nm) | 44 / 56 / 70 / 70 |
| Le couple de charge moyen maximal autorisé (Nm) | 34 / 35 / 51 / 51 |
| Couple maximum instantané autorisé (Nm) | 91 / 113 / 143 / 112 |
| Vitesse de rotation maximale à l'extrémité de sortie (RPM) | 60 / 37.5 / 30 / 25 |
| Précision de positionnement répétée | 1' |
| Vitesse nominale du moteur (RPM) | 3000 |
| Vitesse instantanée maximale du moteur (RPM) | 4500 |
| Puissance nominale du moteur | 80 |
| Tension nominale (V) | 48 |
| Poids (kg) | 0.68 |
| Résolution de l'encodeur de sortie | 19 bits absolu à tour unique (sans batterie) |
| Résolution de l'encodeur d'entrée | 19 bits absolu ST(multi-tour via sortie, sans batterie) |
| Bus de terrain | EtherCAT / CAN / CAN FD |
| Frein intégré | Frein électromagnétique à pignon |
Applications
- Robots humanoïdes
- Bras robotiques
- Exosquelettes
- Robots quadrupèdes
- Véhicules AGV
- Robots ARU
Manuels
- MODULE D'ARTICULATION ULTRA-LÉGER CATALOGUE.pdf
- TSJA17_Installation_Illustration.pdf
- Communication série Specification.pdf
Détails
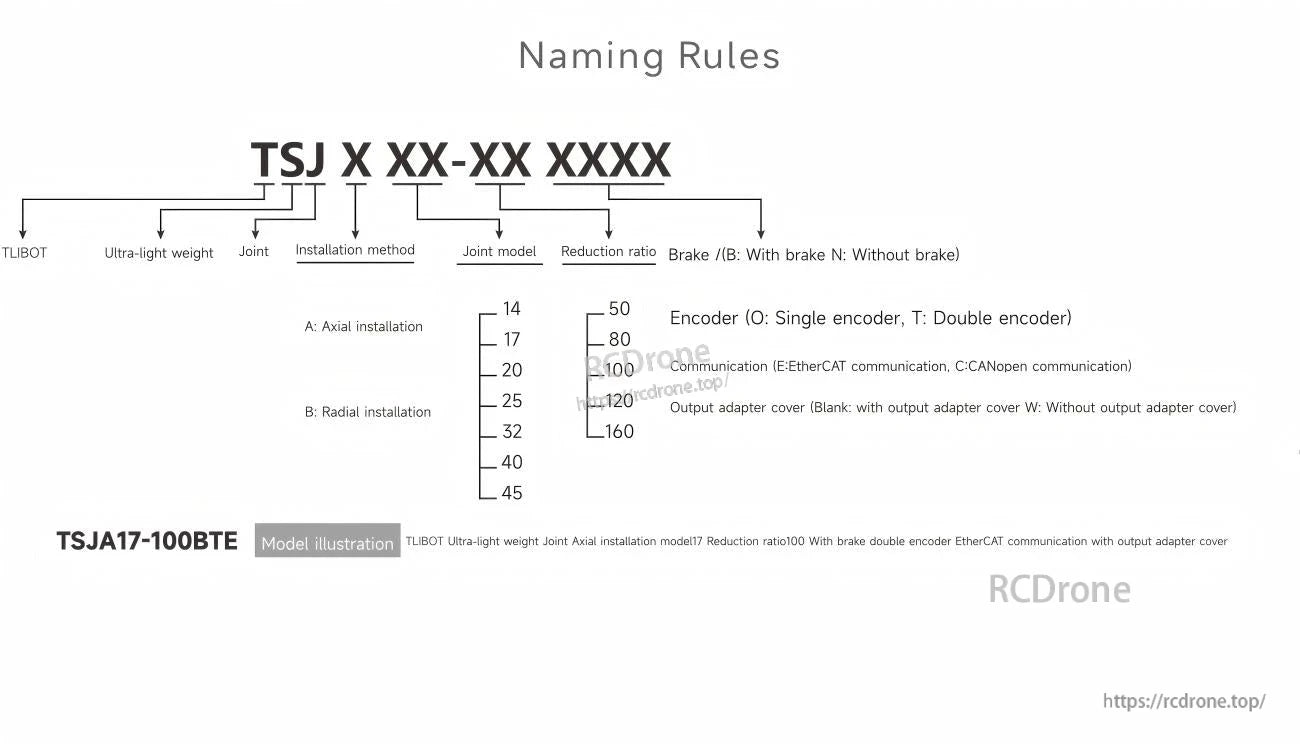
TSJA17-100BTE est un joint ultra-léger TLIBOT avec installation axiale, modèle 17, rapport de réduction 100, frein inclus, double encodeur, communication EtherCAT et couvercle d'adaptateur de sortie.
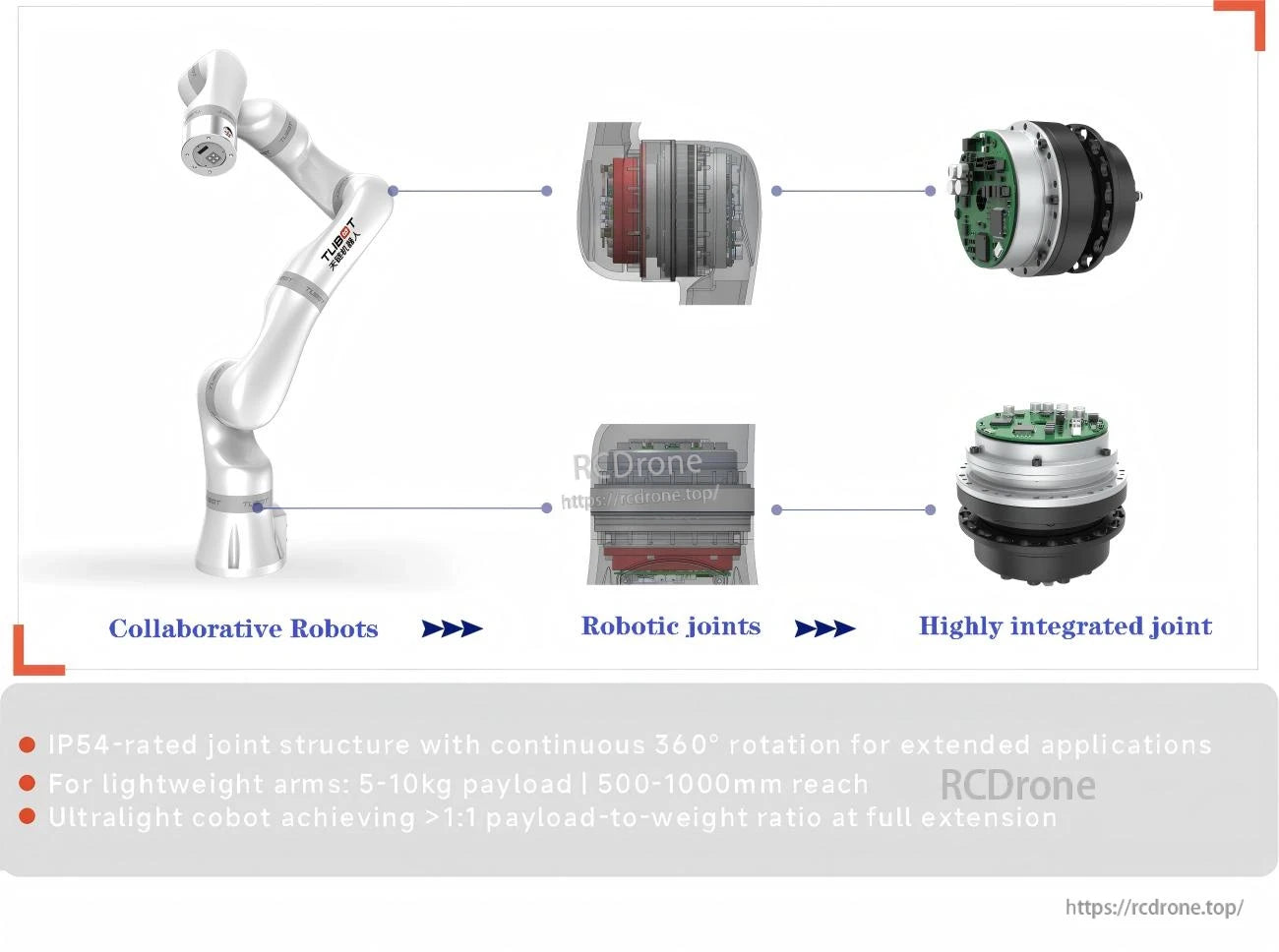
Robot collaboratif TLIBOT avec des articulations classées IP54, rotation à 360°, charge utile de 5-10 kg, portée de 500-1000 mm, et un rapport charge utile/poids >1:1. Conception d'articulations hautement intégrée pour des bras légers.
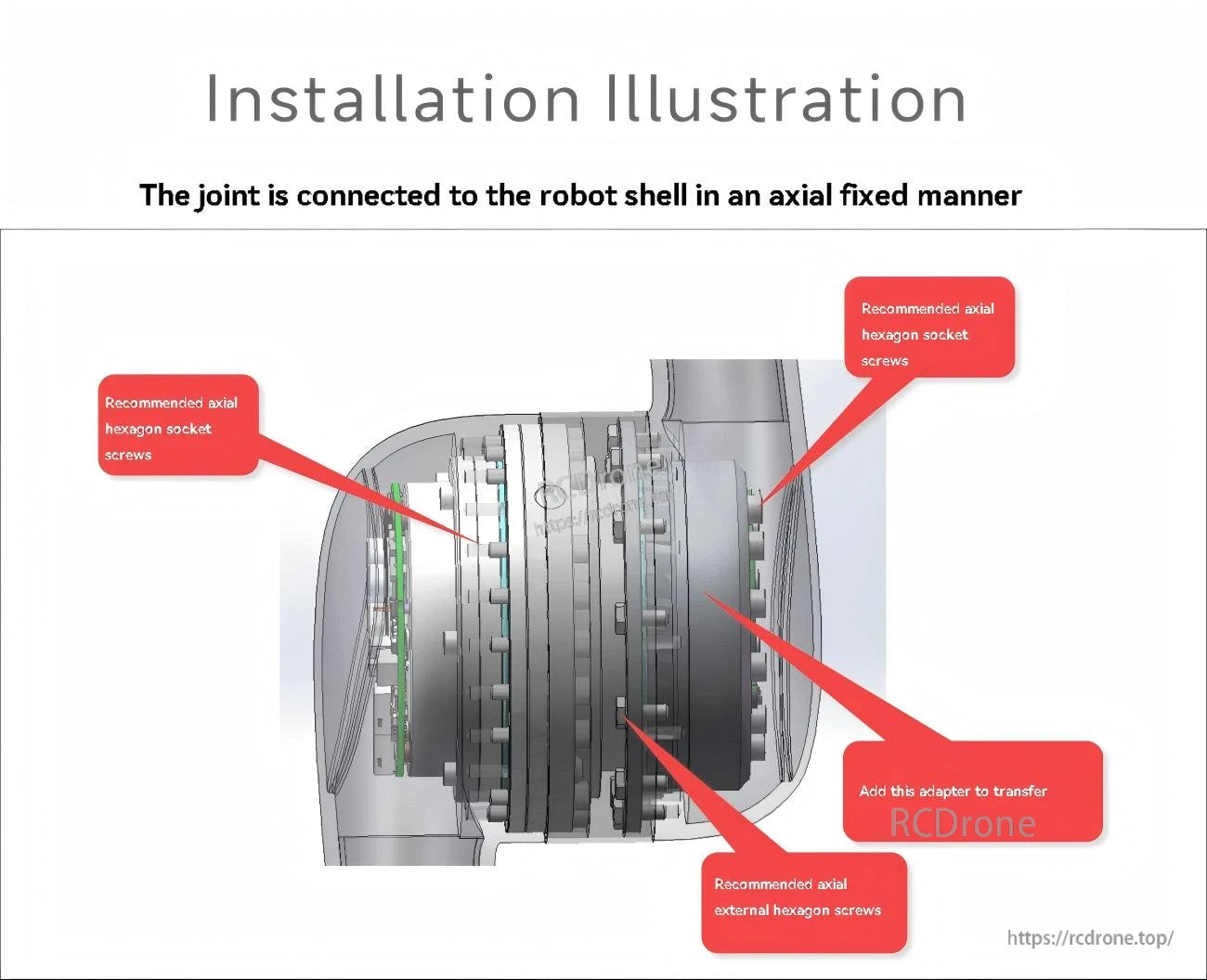
Guide d'installation pour l'articulation TLIBOT TSJA17 : connexions par vis axiales et utilisation d'adaptateurs.
Related Collections


