








WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – Accéléromètre, gyroscope et inclinomètre 6 axes, compatible ROS/Matlab
WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – Accéléromètre, gyroscope et inclinomètre 6 axes, compatible ROS/Matlab
WitMotion
Impossible de charger la disponibilité du service de retrait
Aperçu
Le WitMotion HWT601-AGV-485 est un capteur d'attitude et de cap à 6 axes conçu pour les robots AGV, les drones et les plateformes autonomes. Il combine accélération à 3 axes + vitesse angulaire à 3 axes et fournit angle à 3 axes &et quaternion via RS485 (Modbus) à une fréquence allant jusqu'à 200 Hz. Le module dispose de filtrage dynamique de Kalman, calibration de plateau tournant haute précision, acquisition de biais automatique/manuelle, alimentation de secours pour sauvegarde de cap en cas de coupure, et d'un boîtier étanche/dépoussiérant IP67. Il prend également en charge le chaînage multi-niveaux (jusqu'à 32 unités) pour une mesure d'attitude synchronisée.
Caractéristiques clés
-
Angle haute précision : Précision XY 0,1° ; Précision Z 0,1° (HWT601-AGV-485) / 0,15° (WT601-AGV-485).
-
Erreur de gyroscope stable: XY 5°/h; Z 2°/h (HWT601-AGV-485) / 5°/h (WT601-AGV-485).
-
Large plage d'entrée 9–36 V, courant de fonctionnement ≈ 8 mA @12 V.
-
RS485 Modbus, baud 4,800–230,400 bps.
-
Échantillonnage: lecture demande-réponse jusqu'à 200 Hz.
-
Algorithme: fusion de filtre de Kalman et algorithme de direction AGV dédié.
-
Logiciel: suite PC gratuite avec tableaux de bord en direct, graphiques, visualisation 3D (voiture/sphère/cube/plan), configuration (biais, référence d'angle, calibration d'accélération, facteurs d'échelle), enregistrement de données & sauvegarde directe, et importation Matlab.
-
Convivial pour les développeurs : programmes d'exemple et support de code pour ROS, Linux, C/C#, Python.
-
Environnemental : IP67, -40~80 °C (variante de table -40~85 °C montrée).
-
Cascadant : jusqu'à 32 capteurs sur RS485 pour une mesure d'attitude simultanée.
Directives d'installation
-
Montez le capteur sur une surface plane, stable et serrée ; des bases inégales provoquent des erreurs d'angle (voir FIG.1–2).
-
Gardez l'axe du capteur parallèle à l'axe mesuré ; évitez les angles inter-axes (voir FIG.3–4).
-
Ce modèle ne prend en charge que l'installation horizontale.
Logiciel &et Visualisation
-
Panneau de données puissant (angles, taux, accélération, magnétisme, quaternion, ports, température, tension, etc.).
-
Panneau de configuration : débit en bauds, adresse de l'appareil, acquisition automatique de biais, réinitialisation de l'axe Z, calibration de l'accélération, référence d'angle, calibration manuelle positive/négative et facteurs d'échelle.
-
Modèles 3D pour un suivi de mouvement intuitif et courbes en temps réel avec mises à jour dynamiques.
-
Vue des données brutes et sauvegarde de fichiers pour une collecte facile ; importation d'analyse Matlab prise en charge.
-
Démos ROS IMU INS : visualisation du suivi d'attitude et affichage des données d'attitude (lacet/roulis/ tangage, vitesse angulaire, accélération linéaire).
html
Spécifications
Interface &et Performance
| Article | HWT601-AGV-485 | WT601-AGV-485 |
|---|---|---|
| Interface / Protocole | RS485 / Modbus | RS485 / Modbus |
| Taux de baud | 4,800–230,400 bps | 4,800–230,400 bps |
| Données de sortie | Accélération 3 axes, vitesse angulaire, angle, quaternion | Identique |
| Fréquence d'échantillonnage | Jusqu'à 200 Hz (demande–réponse) | Jusqu'à 200 Hz |
| Précision de l'angle XY | 0.1° | 0. 1° |
| Précision de l'angle Z (erreur de rotation à 360°) | 0.1° | 0.15° |
| Plage d'accélération / résolution | ±4 g / 0.0001 g/LSB | Identique |
| Plage de gyroscope / résolution | ±250 °/s / 0.0122 (°/s)/LSB | Identique |
| Plage d'angle / résolution | XZ: ±180°; Y: ±90° / 0.0059° | Identique |
| Instabilité de biais du gyroscope (XY / Z) | 5°/h / 2°/h | 5°/h / 5°/h |
| Coefficient de température (XYZ) | 0.002°/°C | 0.002°/°C |
Électrique, Mécanique &et Environnement
-
Tension d'alimentation : 9–36 V; Courant de fonctionnement : ≈ 8 mA (12 V)
-
Dimensions : 55 × 36.8 × 24 mm; Longueur du câble : 1 m
-
Protection : IP67
-
Température de fonctionnement : -40~80 °C (la variante de table montre également -40~85 °C)
-
Installation : Montage horizontal uniquement
-
Cascading : Jusqu'à 32 unités sur RS485
Domaines d'application
AGV/AMR et robots mobiles, drones/UAV, véhicules logistiques sans pilote et modules de perception de conduite autonome.
Dénomination et sélection de modèle & Sélection
-
HWT601-AGV-485 – précision Z-axis supérieure (0.1°) et instabilité de biais Z inférieure (2°/h).
-
WT601-AGV-485 – spécifications standard de l'axe Z (0,15°, 5°/h).
Choisissez HWT601 lorsque la précision de l'orientation Z est critique.
Détails

Capteur d'attitude à haute précision à 6 axes avec accélération 3 axes, vitesse angulaire, angle et quaternion. Comprend un algorithme de cap AGV, protection IP67, filtrage de Kalman, acquisition automatique de biais et support logiciel PC.
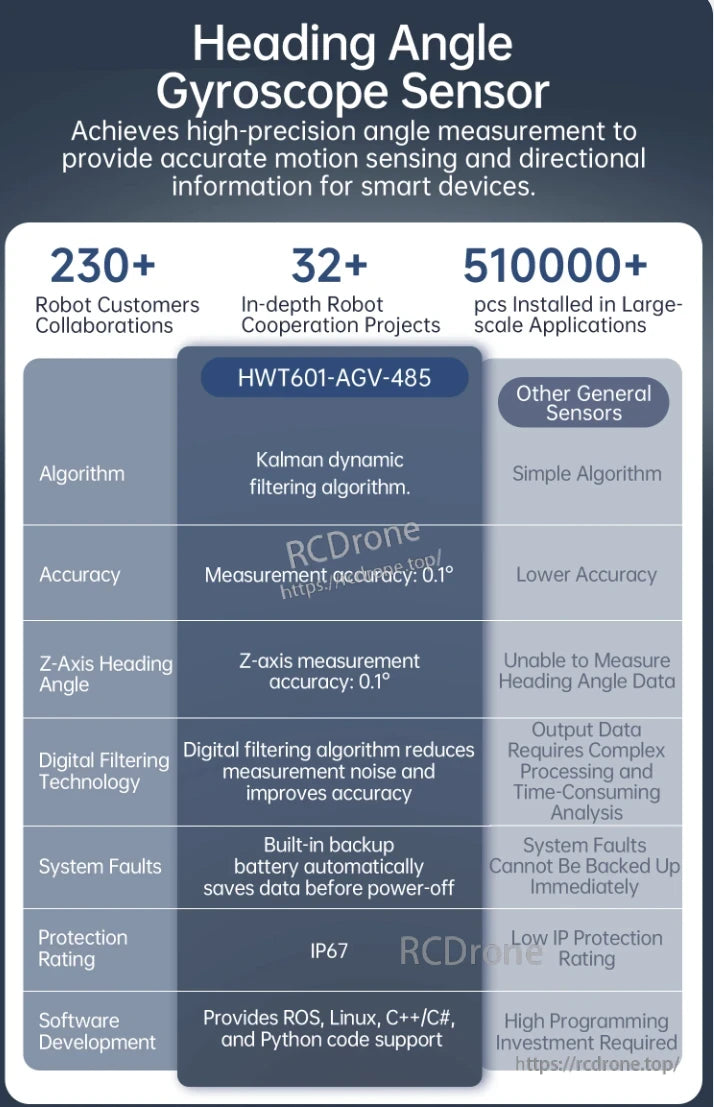
Le capteur gyroscopique d'angle de cap HWT601-AGV-485 offre une mesure d'angle de haute précision avec filtrage de Kalman, une précision de 0,1°, réduction du bruit numérique, protection IP67, et prend en charge ROS, Linux, C++ et Python. Plus de 230 collaborations robotiques et plus de 510 000 installations.
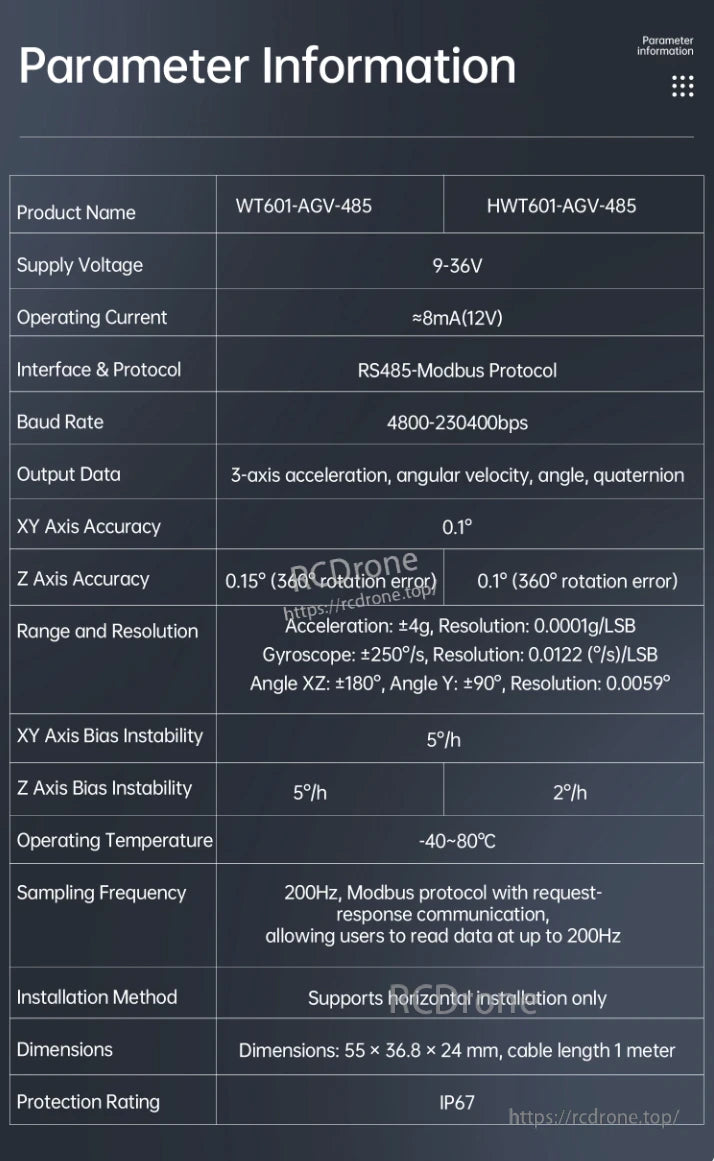
L'IMU HWT601-AGV offre une alimentation de 9-36V, RS485-Modbus, un échantillonnage de 200Hz, une accélération de ±4g, un gyroscope de ±250°/s, une classification IP67, et un fonctionnement de -40 à 80°C. Il fournit des données 3 axes précises et haute résolution.
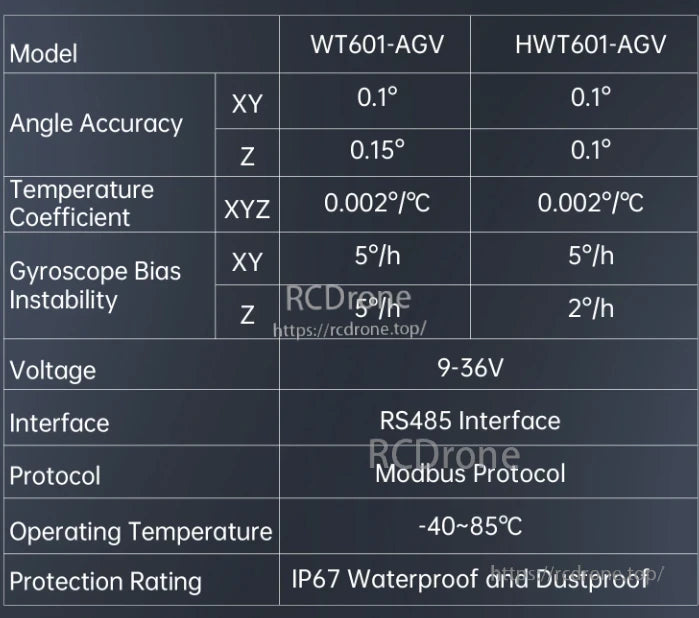
L'IMU HWT601-AGV offre une précision d'angle de 0,1° sur les axes XY et Z avec un coefficient de température de 0,002°/°C sur XYZ. L'instabilité de biais du gyroscope est de 5°/h (XY) et 2°/h (Z). Il fonctionne sur 9–36V, utilise RS485 avec Modbus, et fonctionne de -40 à 85°C. Classé IP67, il offre une protection contre l'eau et la poussière. La variante WT601-AGV a des spécifications similaires mais une précision de 0,15° sur l'axe Z et une instabilité de biais de 5°/h sur l'axe Z. Les deux modèles garantissent des performances fiables dans des environnements exigeants.
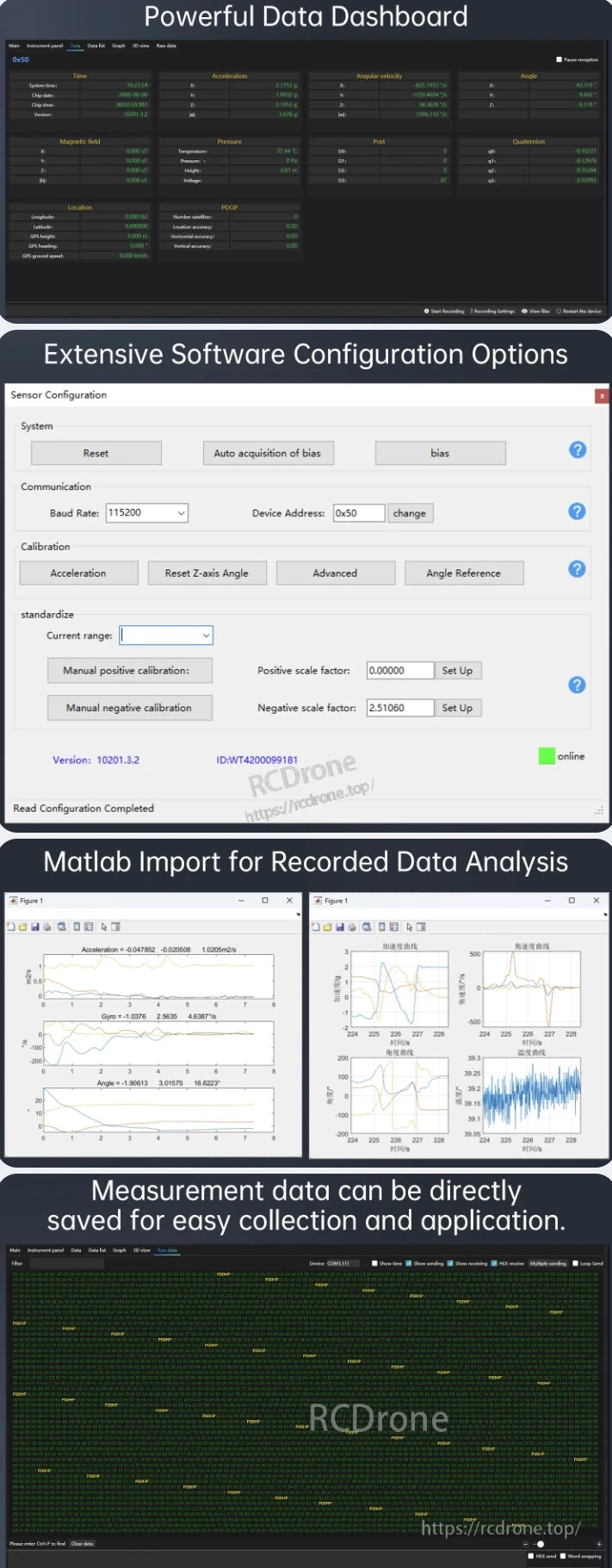
Tableau de bord de données puissant avec des lectures de capteurs en temps réel, une configuration logicielle étendue, importation MATLAB pour analyse, et sauvegarde directe des données pour une collecte et une application faciles.
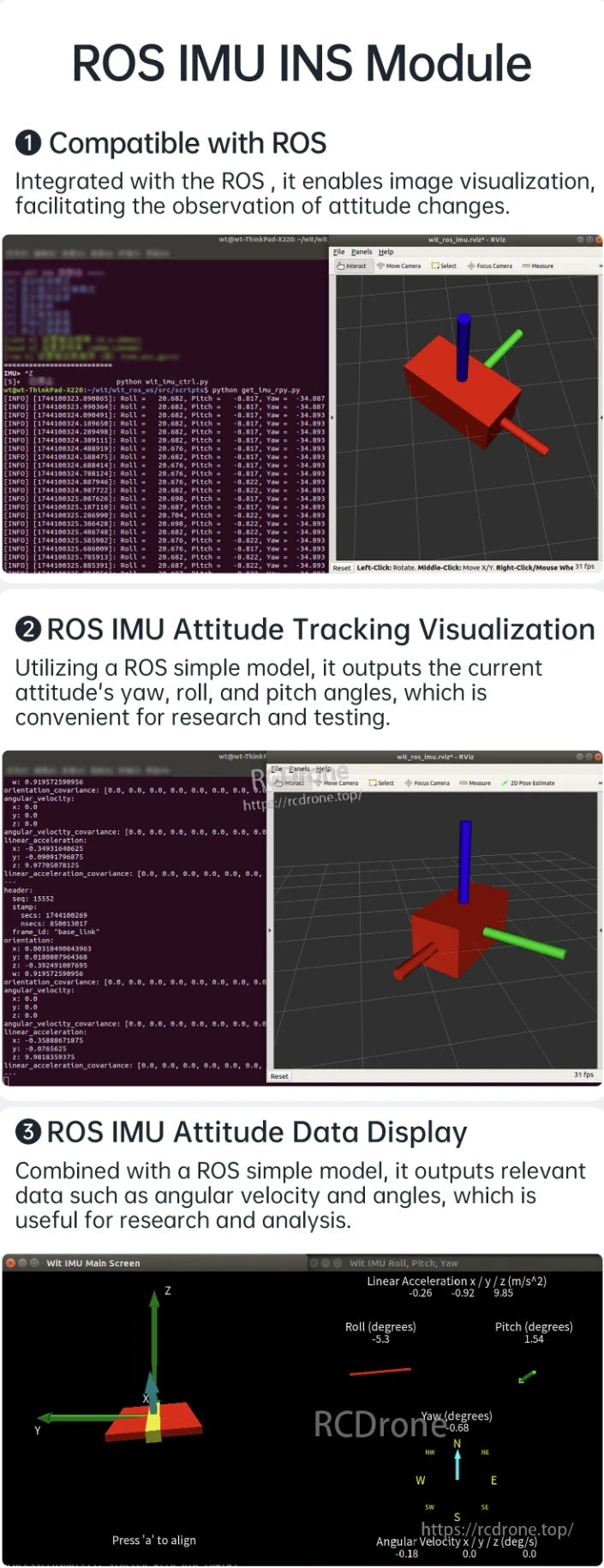
Le module ROS IMU INS offre une compatibilité ROS, visualise le suivi d'attitude et affiche en temps réel le roulis, le tangage, le lacet, la vitesse angulaire et l'accélération linéaire pour la recherche et l'analyse.
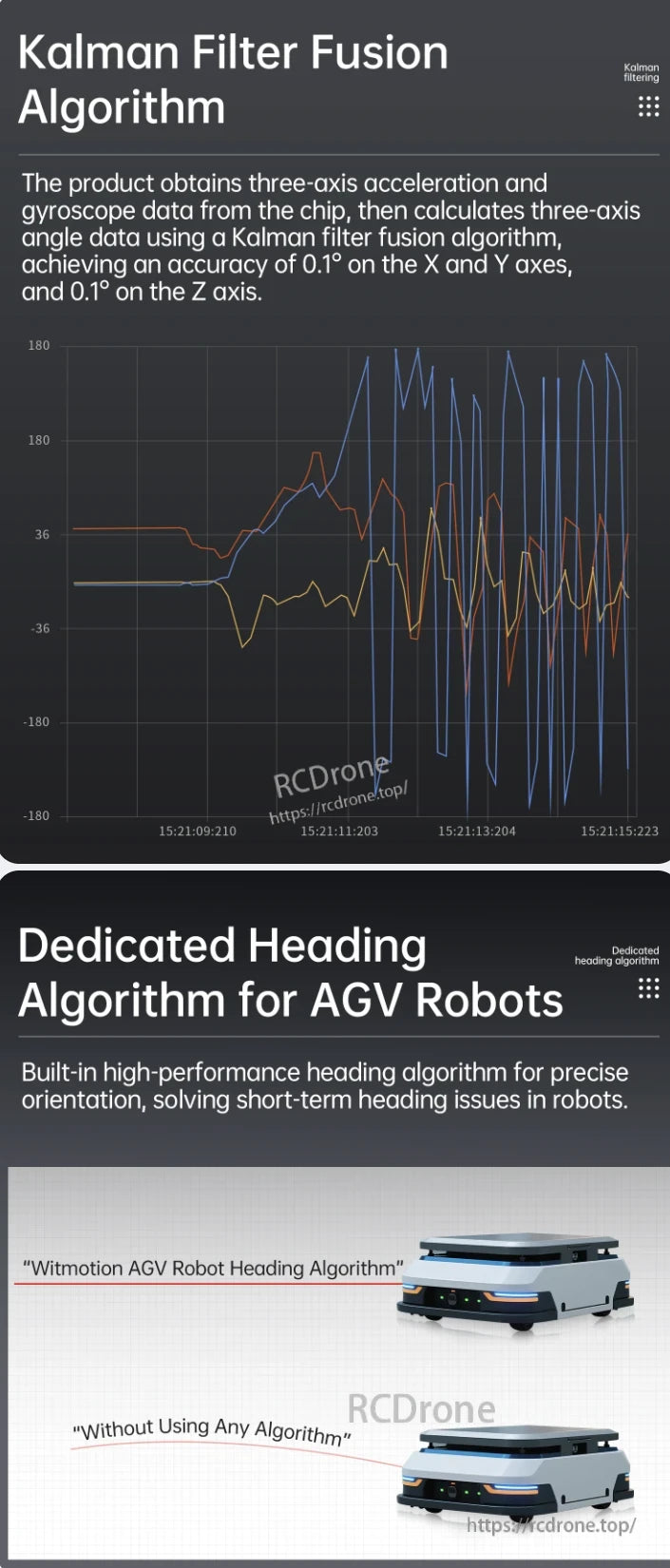
Le WitMotion HWT601 AGV IMU fournit des données d'angle précises sur 3 axes avec une précision de 0,1° en utilisant la fusion de filtre de Kalman. Son algorithme de cap dédié garantit une orientation stable du robot, améliorant considérablement les performances par rapport aux systèmes sans de tels algorithmes.
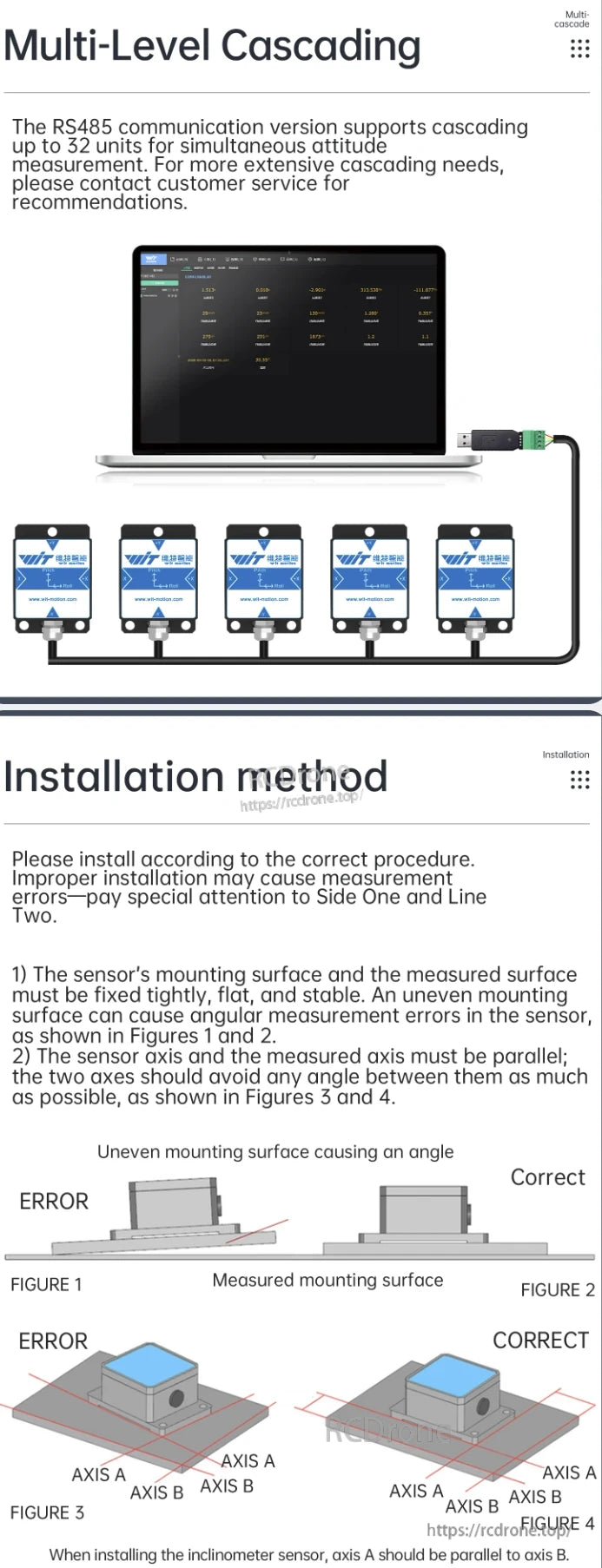
Le WitMotion HWT601 AGV IMU prend en charge jusqu'à 32 unités en cascade via RS485 pour la mesure d'attitude. Assurez-vous d'un montage plat et stable et d'axes alignés pour garantir la précision.
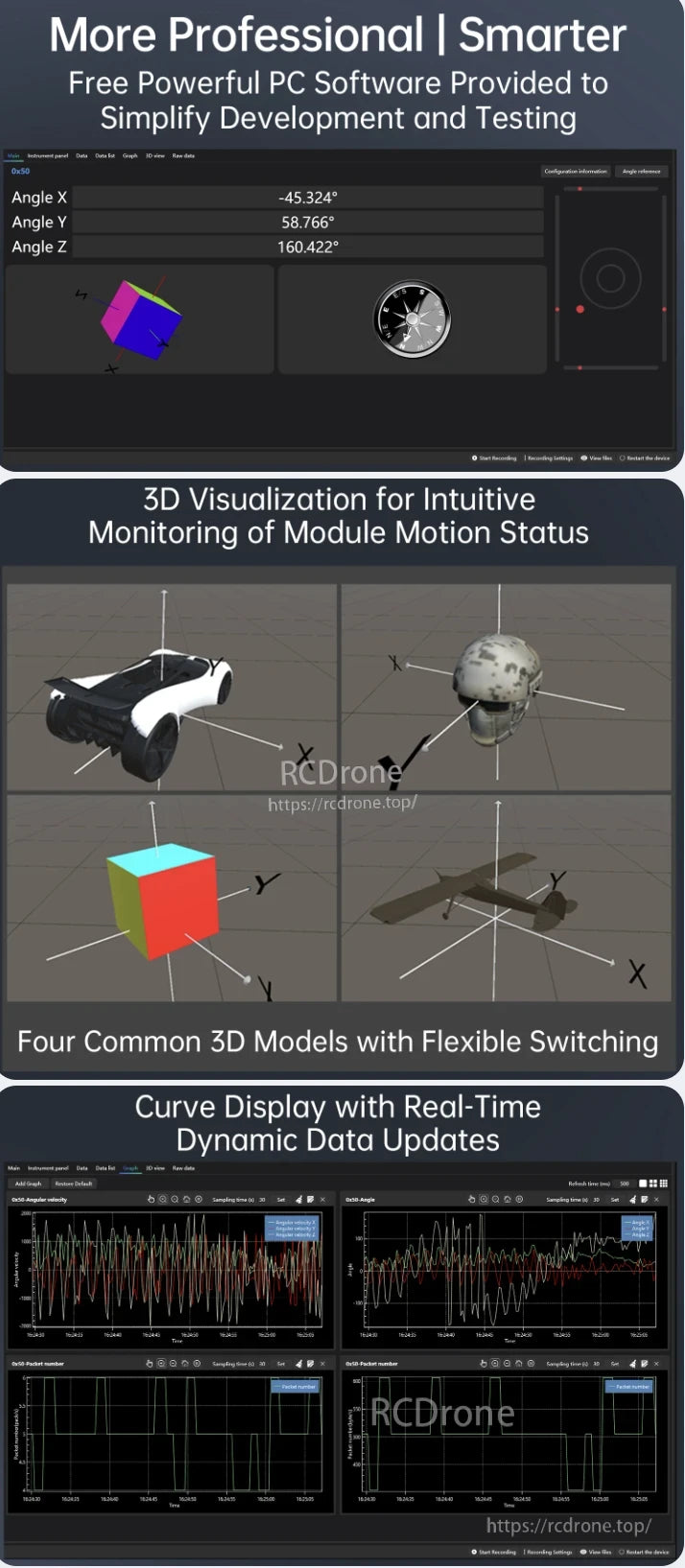
Le logiciel professionnel pour PC du WitMotion HWT601 AGV IMU offre une visualisation 3D en temps réel, un suivi des angles et un affichage de courbes dynamiques.Les fonctionnalités incluent un suivi de mouvement intuitif, un changement de modèle flexible et des mises à jour de données en direct pour un développement et des tests efficaces.
La documentation de support comprend des programmes d'exemple pour STM32, Arduino, 51 UART, Windows C++ et Matlab pour aider les développeurs à appliquer le produit à l'aide de tutoriels et d'exemples de code.
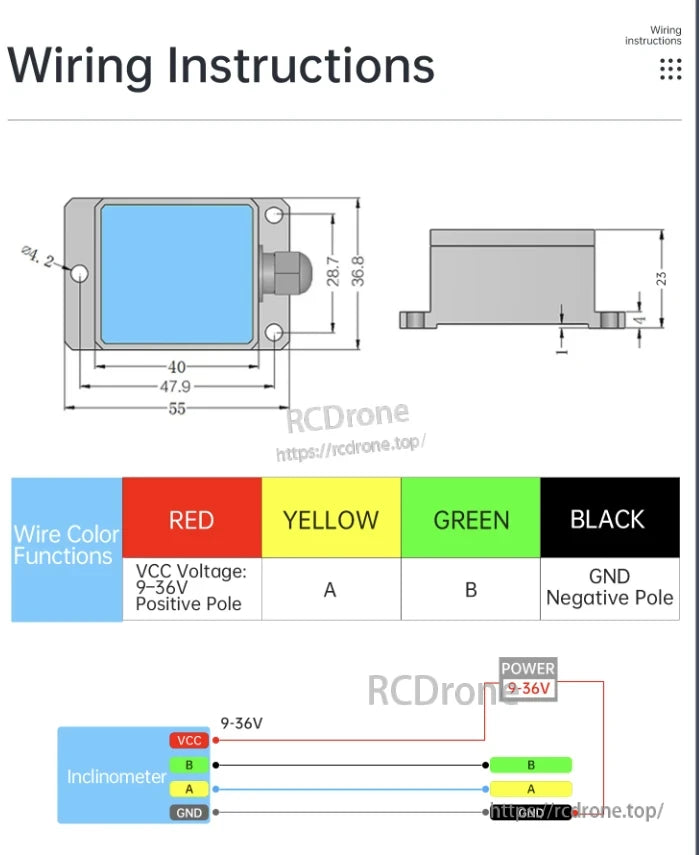
Guide de câblage de l'IMU WitMotion HWT601 AGV : rouge (9-36V), jaune (A), vert (B), noir (GND). Dimensions et schéma de connexion fournis.

WitMotion HWT601 AGV IMU pour drones, conduite autonome, robots mobiles et véhicules logistiques sans pilote.
Related Collections








