WitMotion WT61 IMU (MPU6050) – Accéléromètre 6 axes + Gyro avec sortie d’angle, Kalman AHRS, TTL série, 20/100 Hz, 3,3–5 V pour Arduino/Raspberry Pi/PC
WitMotion WT61 IMU (MPU6050) – Accéléromètre 6 axes + Gyro avec sortie d’angle, Kalman AHRS, TTL série, 20/100 Hz, 3,3–5 V pour Arduino/Raspberry Pi/PC
WitMotion
Impossible de charger la disponibilité du service de retrait
Aperçu
Le WitMotion WT61 est un capteur d'attitude MEMS à 6 axes qui fournit des données sur l'accélération 3 axes, la vitesse angulaire 3 axes et l'angle fusionné (roulis/plané/virage). Il utilise un MCU de 48 MHz avec un IMU intégré (MPU6050, selon la dénomination du modèle) et la fusion dynamique de WitMotion + filtrage de Kalman pour offrir une grande stabilité, un faible bruit et des résultats d'angle précis. Le module communique via TTL série et est minuscule (15,24 × 15,24 × 2 mm, ~1 g), ce qui le rend facile à intégrer dans des dispositifs IoT, des robots, des machines mobiles, la surveillance structurelle, l'électronique grand public et des gadgets VR.
Caractéristiques clés
-
3 sorties : accélération, vitesse angulaire et angle (attitude).
-
Algorithme de fusion : fusion dynamique + filtrage de Kalman; héritage d'algorithme d'attitude de qualité satellite; précision de l'angle 0,05° (statique), 0,1° (dynamique).
-
Matériel de haute qualité : MCU à cœur de 48 MHz, puce d'alimentation stable, pads en cuivre à immersion dorée, capteur MEMS intégré.
-
Petit &et léger : 15,24 × 15,24 × 2 mm, ~1 g; montage horizontal/vertical pris en charge.
-
Taux de données sélectionnables &et baud : 20 Hz / 100 Hz taux de retour ; 9600 / 115200 bps.
-
Application Android + logiciel Windows : traçage en temps réel, enregistrement, vue des données brutes, exportation TXT, visualiseur de démonstration 3D, et configuration riche (bande passante, taux de sortie, placement, seuils, sommeil, réinitialisation de l'axe Z).
-
SDK &et exemples : Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, C/C++.
-
Documentation &et outils : fiche technique, manuel, MiniIMU.exe, pilotes CH340/CP2102, vidéos de démonstration.
html -
Qualité &et support : rapport de calibration d'usine montré ; RoHS, CE, ISO 9001.
Spécifications techniques
| Article | Détails |
|---|---|
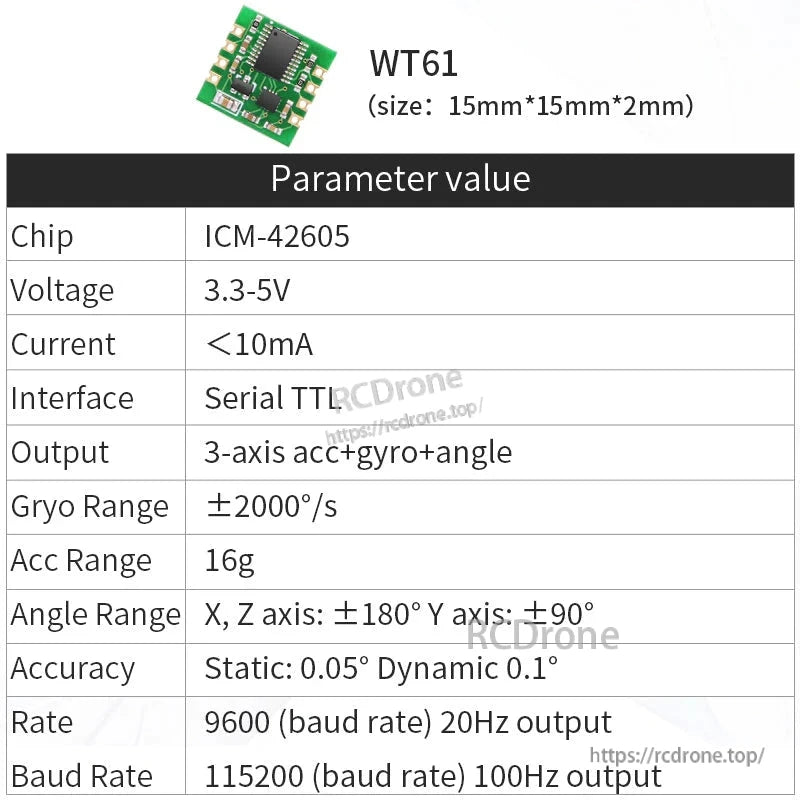
| Modèle / Marque | WT61 / WitMotion |
| Tension d'alimentation | 3. 3 V ~ 5 V |
| Courant | < 10 mA |
| Interface | Série TTL |
| Contenu de sortie | Accélération 3 axes, vitesse angulaire 3 axes, angle |
| Plage d'accélération | ±2/±4/±8/±16 g (adaptatif) |
| Plage de gyroscope | ±2000 °/s |
| Plage d'angle | X, Z: ±180°; Y: ±90° |
| Précision de l'angle | X/Y statique 0.05°; dynamique 0.1° |
| Stabilité (biais) | Acc: 0.01 g; Gyro: 0.05 °/s; Angle (XY): 0.01° |
| Taux de retour | 20 Hz / 100 Hz |
| Taux de transmission | 9600 / 115200 bps |
| Résolution d'accélération | ±2 g: 0.061 mg/LSB (16384 LSB/g); ±4 g: 0.12 mg/LSB (8192 LSB/g); ±8 g: 0.25 mg/LSB (4096 LSB/g); ±16 g: 0.5 mg/LSB (2048 LSB/g) |
| Taille / Poids | 15.24 × 15.24 × 2 mm (0.6″ × 0.6″ × 0.08″) / ~1 g |
| Temp. de fonctionnement | –40 °C à +85 °C |
| Définition de l'axe | Coordonnées cartésiennes, règle de la main droite |
| Montage | Horizontal ou Vertical |
Pinout & Mécanique
Contour de la carte (mm): A = 15.24, B = 15.24, C = 2.54, D = 12.7, E = 2.
Broches:
| # | Nom | Fonction |
|---|---|---|
| 1 | D0 | NC réservé |
| 2 | VCC | 3.3–5 V |
| 3 | RT | Données série entrée, niveau TTL |
| 4 | TX | Données série sortie, niveau TTL |
| 5 | GND | Terre |
| 6 | SWIM | Interface de données SWIM |
| 7 | D2 | NC réservé |
| 8 | VCC | 3.3–5 V |
| 9 | SCL | NC réservé |
| 10 | SDA | NC réservé |
| 11 | GND | Terre |
| 12 | D3 | NC réservé |
Câblage MCU (schéma montré): TTL série vers MCU hôte avec TX↔RX croisé (VCC, TX, RX, GND).
Logiciel, Applications &et Outils
-
Application Android: se connecter via USB-à-TTL + OTG téléphone; graphiques en temps réel pour Acc/Gyro/Angle; Enregistrer bouton; menu des modules (3 axes / 6 axes / 9 axes / BLE5.0 / WT901-WIFI); pages de Configuration riches (calibration acc, direction d'installation, taux de récupération, bande passante de mesure, seuil de détection statique, sélection de motif).
-
PC Windows (MiniIMU.exe): jauges d'attitude en direct, courbes en temps réel (“Mesure de données solide comme le roc”), Stockage de données & Export (données brutes et analysées au format TXT/CSV), Menu de configuration (baudrate 115200, mode=Serial, sélection de direction, bande passante e.g., 94 Hz, sommeil, réinitialiser l'axe Z à 0°).
-
Démo 3D: visualise le mouvement du capteur ; code source 3D proposé (comme indiqué).
-
Équipement de test: pince plug-and-play optionnelle pour le câblage sans soudure (vendue séparément).
Algorithmes & Performance
-
Algorithme WitMotion × Filtre de Kalman: dérivé des Méthodes de détermination d'attitude par satellite aérospatial; combine fusion cinétique, filtrage numérique, estimation d'état ; fournit le 0.05°/0.1° précision angulaire et excellente stabilité de biais/bruit faible (graphique et badges montrés).
Applications typiques
Appareils IoT, surveillance environnementale, protection des structures de bâtiment, robotique &et automatisation, pétrole &et énergie, machines mobiles, industrie minière, électronique grand public, gadgets VR.
Conformité &et Support
-
Certificats montrés : Rapport de Calibration, RoHS, CE, ISO 9001.
-
Notes de carte comparative : testé en usine avant expédition, SDK disponible, garantie de 12 mois, support technique à vie de WitMotion R&et D.
Notes &et Accessoires
-
Inclus : module WT61.
-
Optionnel : convertisseur USB vers TTL, adaptateur OTG pour téléphone, fixture de test pince.
-
Utilisez la convention de coordonnées à droite et suivez les instructions d'installation horizontales/verticales indiquées dans le logiciel pour une meilleure précision.
Détails

Le WitMotion WT61 IMU offre une précision de tangage de 0,05 degré, un filtrage numérique, un algorithme de fusion, et inclut des fonctionnalités d'accélération, de gyroscope, d'angle, de vibration, de MCU et de filtrage.

Le WitMotion WT61 IMU propose une sortie d'accélération, de gyroscope et d'angle sur 3 axes. Il prend en charge 3,3V-5V, faible courant, série TTL, plage adaptative de ±2/4/8/16g, haute précision, taille compacte, poids léger et large plage de température.

Le WitMotion WT61 IMU offre une haute précision avec filtrage de Kalman, les certifications incluent RoHS, CE, ISO-9001. Caractéristiques : MCU 48MHz, capteur MEMS, puce d'alimentation stable et interface en cuivre doré.

Algorithme WitMotion x Filtre de Kalman. L'algorithme WitMotion provient de l'algorithme de détermination de l'attitude des satellites aérospatiaux, combiné avec le filtrage de Kalman et la fusion dynamique du mouvement. Précision angulaire : axe X, Y : 0,05° (statique), 0,1° (dynamique). Le graphique affiche les données angulaires au fil du temps, avec des lignes bleues, rouges et jaunes représentant différentes mesures ou sorties filtrées. Les horodatages vont de 15:21:09:210 à 15:21:15:223. L'axe vertical s'étend de -180 à 180 degrés.

WitMotion WT61 IMU pour IoT, surveillance environnementale, robotique, automatisation, exploitation minière, ponts, gadgets VR et applications industrielles.

WitMotion IMU offre une haute précision, une stabilité, une taille compacte, des composants supérieurs, un SDK, des tests en usine et un support à vie.Il comprend le filtrage de Kalman, l'algorithme de fusion et une garantie de 12 mois, surpassant les autres.

Le WitMotion WT61 IMU dispose d'une disposition à 12 broches avec VCC, GND, TX, RX, SCL, SDA, SWIM et des ports réservés ; inclut les détails de taille en mm.

Le WitMotion WT61 IMU se connecte via un adaptateur USB vers OTG pour la visualisation et l'enregistrement des données sur smartphone. L'application Android multifonctionnelle affiche les données des capteurs en temps réel, y compris les angles, l'accélération et les horodatages, avec des options de configuration et d'enregistrement des données.

Le WitMotion WT61 IMU offre une configuration facile, une fonctionnalité plug-and-play et des mesures d'attitude en temps réel avec des lectures d'angle.

Le WitMotion WT61 IMU propose une calibration, une mesure en temps réel et une exportation de données. Affiche et stocke l'accélération, la vitesse angulaire, le champ magnétique et les données brutes au format TXT.

Les démonstrations 3D affichent le mouvement du capteur de manière intuitive. Le SDK prend en charge Matlab, Python, Raspberry Pi, STM32, ROS, Arduino et C++/C#. Connexion série TTL avec MCU ; TX et RX sont croisés.

La démonstration 3D visualise le mouvement du capteur avec des modèles de voiture, de casque, de cube et de drone. Le SDK prend en charge Matlab, Python, Raspberry Pi, STM32, ROS, Arduino et C++/C#. Connexion série via TTL reliant le MCU et le module avec TX et RX croisés.

Les tests IMU incluent un plateau tournant à 3 axes, des balayages de vibration, des extrêmes de température, le vieillissement et des évaluations à haute température.


L'IMU WitMotion WT61 offre un taux de retour de 20-100Hz, une tension de 3,3-5V, et détecte l'accélération, l'angle et le gyroscope. Prend en charge l'interface TTL, compatible avec Android, PC, MCU et Arduino.
Related Collections