Capteur accéléromètre haute précision WitMotion WT61C (MPU6050) - IMU AHRS 6 axes Acc+Gyro+Angle pour Arduino / TTL & RS232
Capteur accéléromètre haute précision WitMotion WT61C (MPU6050) - IMU AHRS 6 axes Acc+Gyro+Angle pour Arduino / TTL & RS232
WitMotion
Impossible de charger la disponibilité du service de retrait
Aperçu
Le WitMotion WT61C est un IMU AHRS à 6 axes économique qui fusionne un accéléromètre à 3 axes et un gyroscope à 3 axes pour fournir accélération, vitesse angulaire et angle à 3 axes (roulis/élévation/yaw). Alimenté par l'algorithme de fusion WitMotion (Kalman), il offre une précision d'angle statique XY de 0,05° (0,1° dynamique), ce qui le rend idéal pour la détection d'inclinaison, de vibration et d'attitude dans des projets embarqués, la robotique, l'automatisation, les plateformes de nivellement et les intégrations VR/AR. Il prend en charge les interfaces série TTL (3,3–5 V) et RS232 (5–36 V) et fonctionne parfaitement avec Arduino, STM32, C/C++ et MATLAB en utilisant le SDK et les outils PC fournis.
Caractéristiques clés
-
Sorties à 6 axes : accélération à 3 axes, vitesse angulaire à 3 axes, plus angle à 3 axes.
-
Haute précision : XY statique 0.05°, dynamique 0.1°; stabilité d'accélération 0.01 g.
-
Large plages: Accélération ±16 g; Gyro ±2000 °/s; Angle X/Z ±180°, Y 90°.
-
Taux de sortie ajustable: 0.2–100 Hz; baud 9600 / 115200 bps.
-
Interface double: TTL 3.3–5 V ou RS232 5–36 V pour une intégration facile avec MCU/industrielle.
-
Algorithme de fusion WitMotion: Filtrage de Kalman avec compensation de dérive pour une attitude stable.
-
Configuré via logiciel: Calibration d'accélération, orientation de placement, bande passante, taux de sortie, réinitialiser l'axe Z à 0°.
-
Ressources pour développeurs: Logiciel gratuit pour PC Windows (MiniIMU.exe), drivers (CH340/CP2102), manuel &et fiche technique, SDK pour 51 série, C/C++, STM32, Arduino, MATLAB, plus application Android et vidéos de démonstration.
-
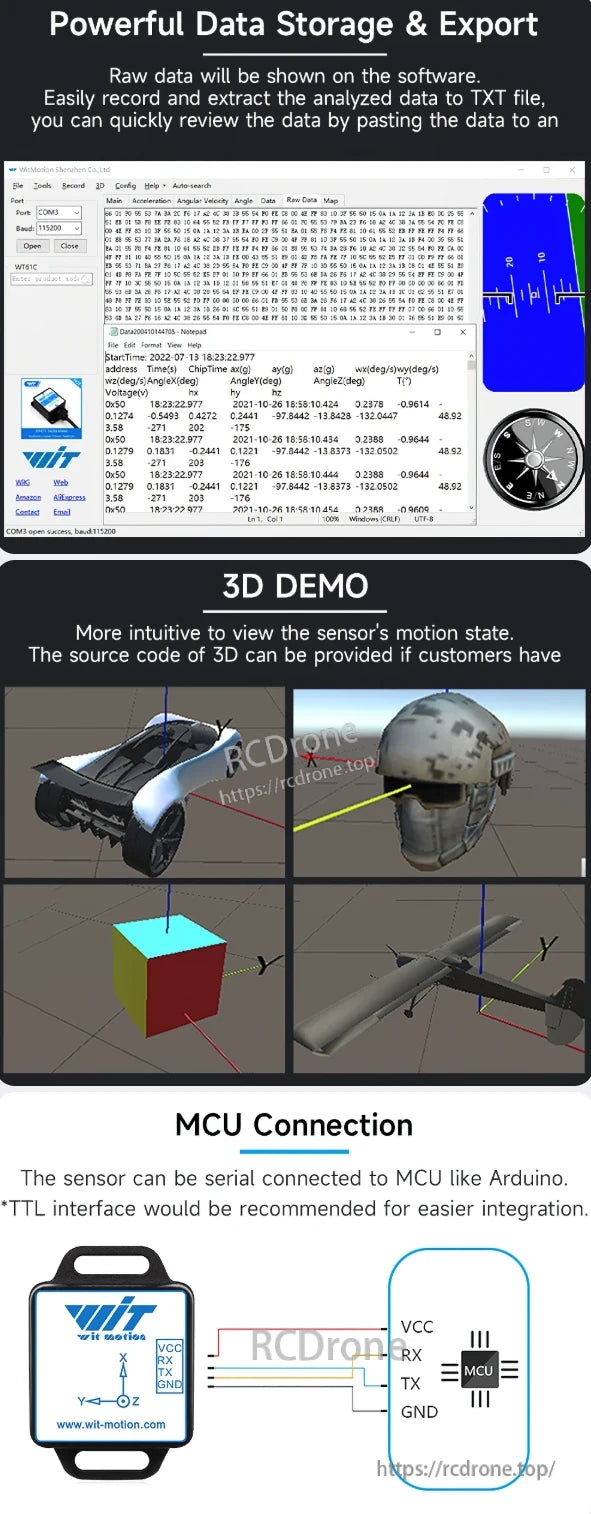
Outils de données: Vue des données brutes, graphiques en temps réel, exportation TXT, et une démonstration de mouvement 3D (code source disponible sur demande).
Spécifications techniques
-
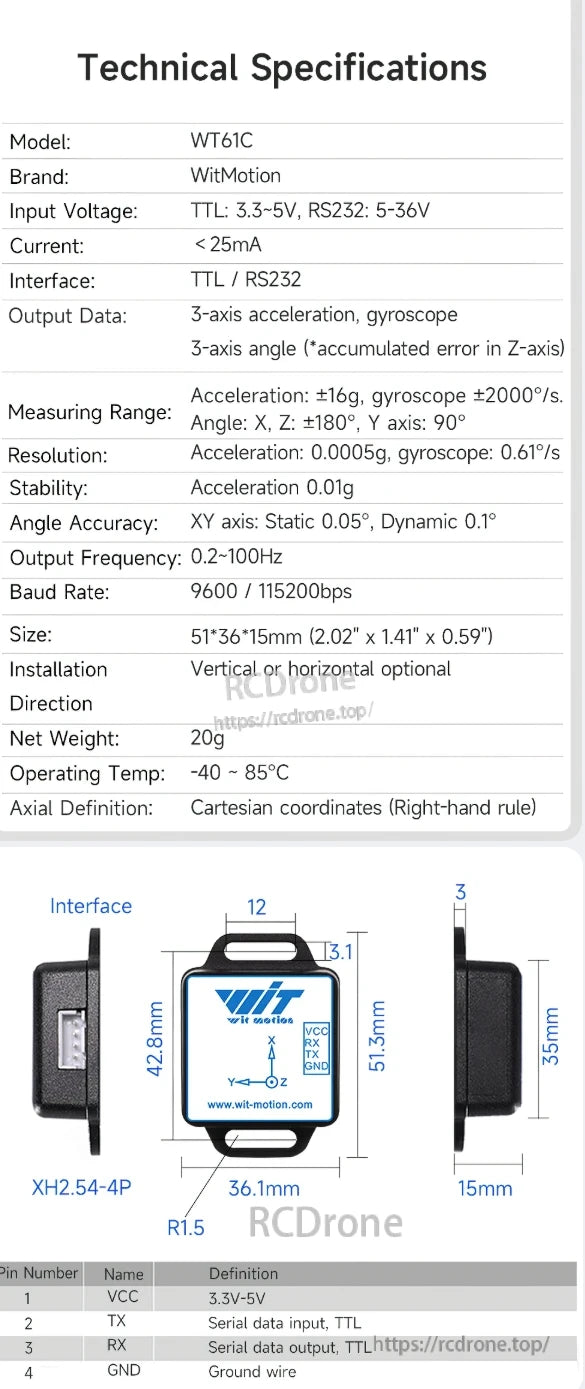
Modèle: WT61C
-
Marque: WitMotion
-
Tension d'entrée: TTL: 3.3–5 V; RS232 : 5–36 V
-
Courant : < 25 mA
-
Interface : TTL / RS232
-
Données de sortie : accélération 3 axes, gyroscope 3 axes, angle 3 axes (erreur accumulée sur l'axe Z)
-
Plage de mesure : Acc ±16 g; Gyro ±2000 °/s; Angle X/Z ±180°, Y 90°
-
Résolution : Acc 0.0005 g; Gyro 0.61 °/s
-
Stabilité : Acc 0.01 g
-
Précision de l'angle : XY statique 0.05°, dynamique 0.1°
-
Fréquence de sortie : 0.2–100 Hz
-
Taux de Baud: 9600 / 115200 bps
-
Taille: 51 × 36 × 15 mm (≈ 2.02″ × 1.41″ × 0.59″)
-
Installation: Verticale ou horizontale
-
Poids Net: 20 g
-
Température de Fonctionnement: −40 ~ 85 °C
-
Définition de l'Axe: Coordonnées cartésiennes, règle de la main droite
Pinout (XH2.54-4P, TTL)
-
VCC — 3.3–5 V
-
TX — Données série entrée, TTL
-
RX — Données série sortie, TTL
-
GND — Masse
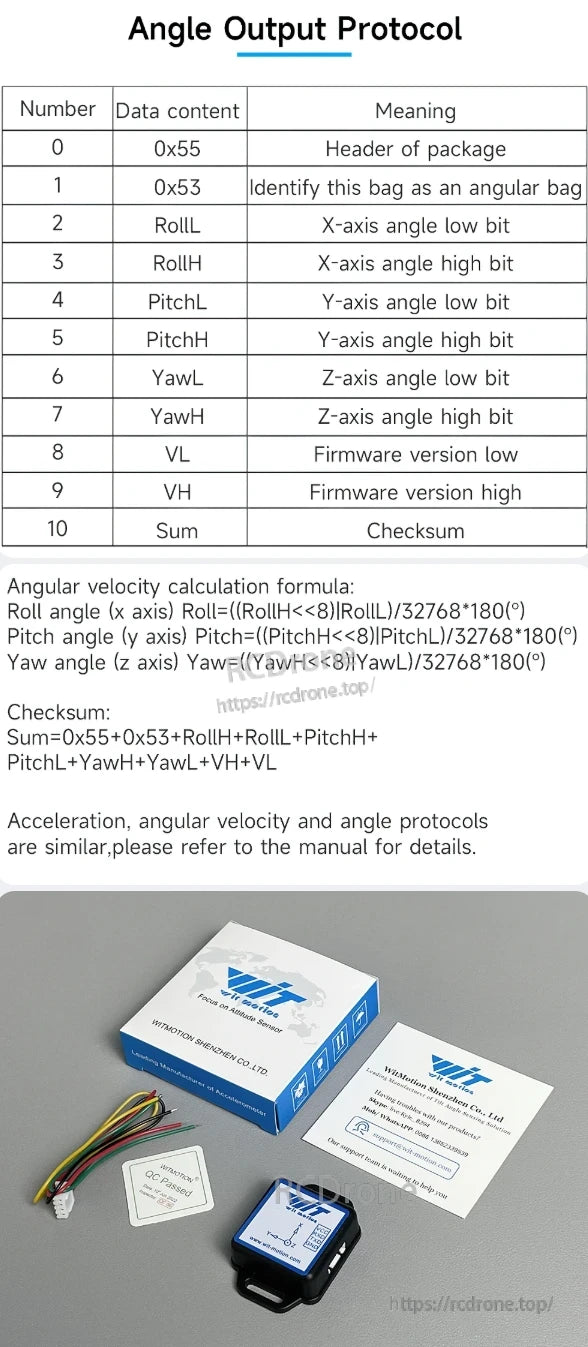
Protocole de sortie d'angle (tête de trame 0x55 0x53)
| Index | Octet | Signification |
|---|---|---|
| 0 | 0x55 | En-tête |
| 1 | 0x53 | Identifier comme angle paquet |
| 2 | RollL | Octet bas de l'angle de l'axe X |
| 3 | RollH | Octet haut de l'angle de l'axe X |
| 4 | PitchL | Octet bas de l'angle de l'axe Y |
| 5 | PitchH | Y-axis angle high byte |
| 6 | YawL | Angle Z-axis low byte |
| 7 | YawH | Angle Z-axis high byte |
| 8 | VL | Version du firmware bas |
| 9 | VH | Version du firmware haut |
| 10 | Somme | Checksum |
Décodage d'angle (°):
-
Roll = ((RollH<<8)|RollL) / 32768 * 180 -
Pitch = ((PitchH<<8)|PitchL) / 32768 * 180 -
Yaw = ((YawH<<8)|YawL) / 32768 * 180
Checksum:Somme = 0x55 + 0x53 + RollH + RollL + PitchH + PitchL + YawH + YawL + VH + VL
(Les paquets d'accélération et de vitesse angulaire suivent un format similaire.)
Logiciel &et Intégration
-
Outils Windows affichent des images brutes, des données analysées, des graphiques en direct et des jauges d'attitude ; support enregistrement &et exportation TXT.
-
Démo 3D visualise le mouvement ; le code source peut être fourni.
-
Connexion MCU : série directe vers Arduino/MCU ; TTL est recommandé pour une intégration plus simple.
Applications Typiques
-
Automatisation &et robotique, surveillance de l'angle d'inclinaison, plateformes de nivellement, surveillance des vibrations, tests industriels, intégration IoT, casques VR/AR.
Détails

IMU économique avec une précision de 0,05° sur les axes X et Y. Fonctionnalités d'inclinaison, de vibration et de détection d'attitude utilisant l'algorithme de fusion WitMotion. Comprend l'accélération, le gyroscope, l'angle, la vibration, le filtrage de Kalman et les fonctions MCU.
Le capteur WitMotion WT61C offre une accélération à 3 axes et un gyroscope avec une plage de ±16g/±2000°/s, une résolution de 0.0005g, une interface TTL/RS232, un débit en bauds de 9600/115200bps, une opération de -40°C à 85°C, et des dimensions de 51.3×36.1×15mm.
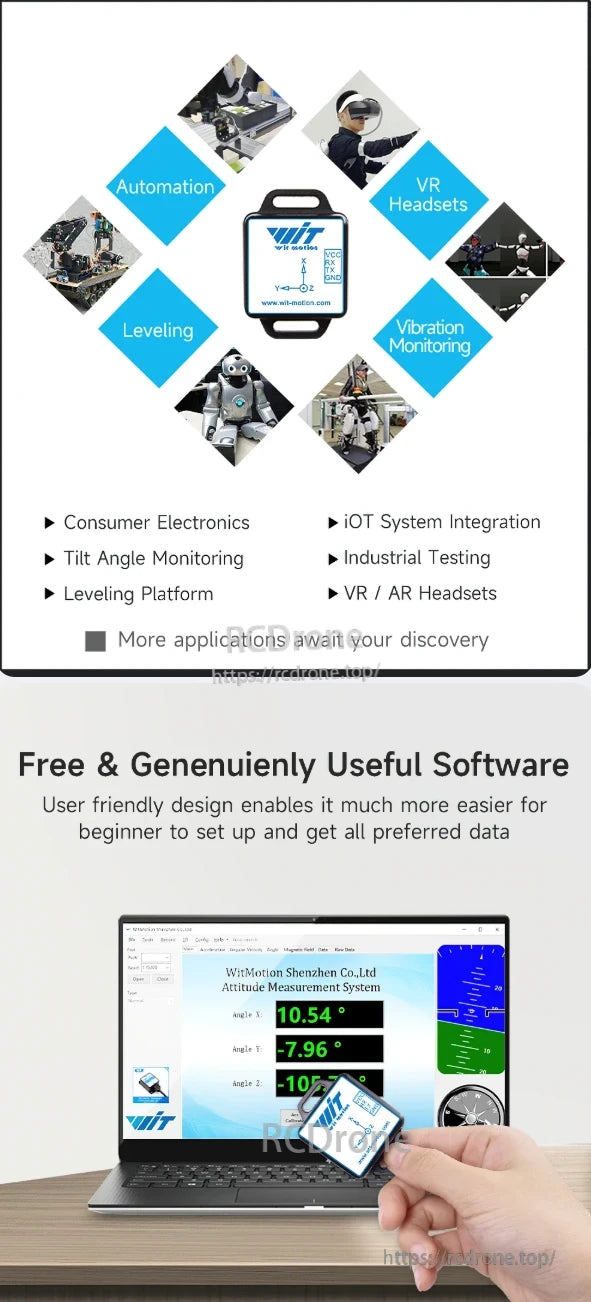
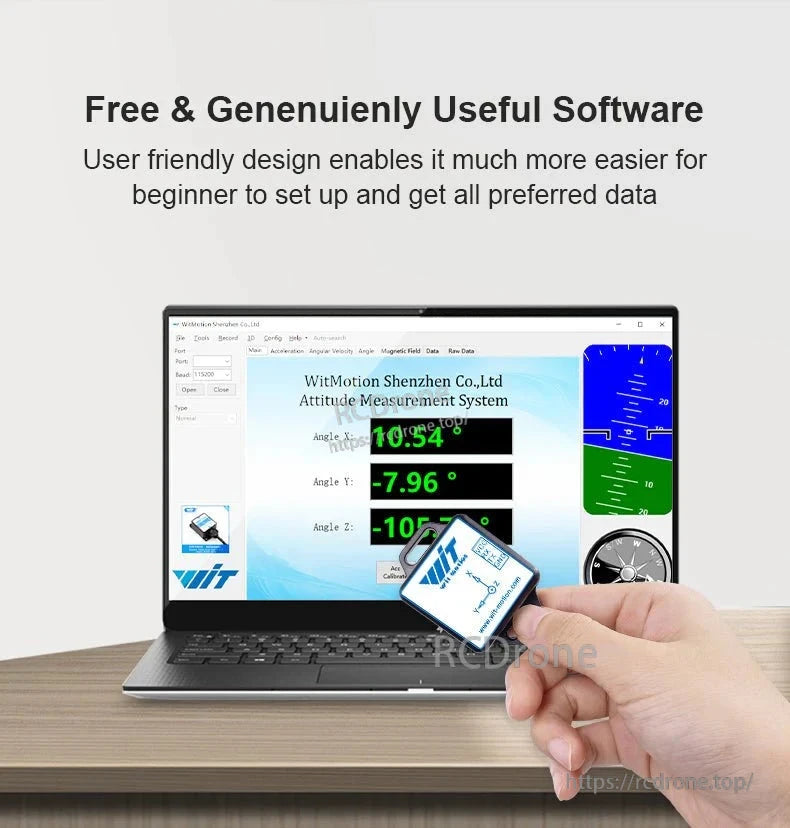
Le capteur d'accélération WitMotion WT61C permet l'automatisation, les casques VR, le nivellement et la surveillance des vibrations. Comprend un logiciel gratuit pour une configuration facile, affichant des données d'attitude en temps réel avec une interface conviviale pour l'électronique grand public, l'IoT, les tests industriels et d'autres applications.
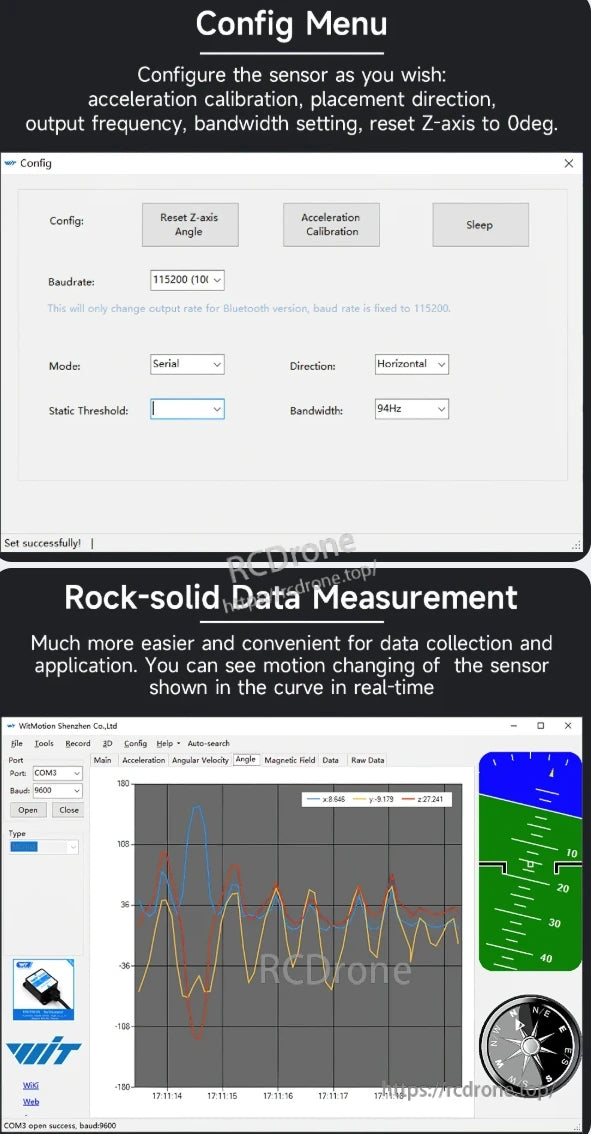
Capteur configurable avec calibration de l'accélération, réglage de la direction et mesure de données en temps réel.Les fonctionnalités incluent la réinitialisation de l'axe Z, l'ajustement de la bande passante et l'affichage en direct de la courbe de mouvement pour un suivi et une analyse précis.
WitMotion WT61C offre une détection de mouvement de haute précision avec exportation de données vers des fichiers TXT, visualisation 3D pour une analyse de mouvement intuitive, et intégration facile du MCU via une interface TTL.

Les kits de développement pour WitMotion WT61C incluent des logiciels, des pilotes et de la documentation pour STM32, Arduino, Windows et Matlab. Comprend SDK, manuels, fiches techniques, vidéos de démonstration et support d'application Android.
Le capteur WitMotion WT61C offre un protocole de sortie d'angle avec roulis, tangage, lacet, version du firmware et somme de contrôle. Livré avec des formules de calcul, de la documentation, des câbles et une étiquette de contrôle qualité.
Related Collections