WitMotion WT901B AHRS (MPU9250) IMU 10 axes avec baromètre & Capteur d’inclinaison, accéléromètre ±16g, gyroscope ±2000°/s, filtre Kalman, UART/I²C, sortie 0,2–200 Hz
WitMotion WT901B AHRS (MPU9250) IMU 10 axes avec baromètre & Capteur d’inclinaison, accéléromètre ±16g, gyroscope ±2000°/s, filtre Kalman, UART/I²C, sortie 0,2–200 Hz
WitMotion
Impossible de charger la disponibilité du service de retrait
Aperçu
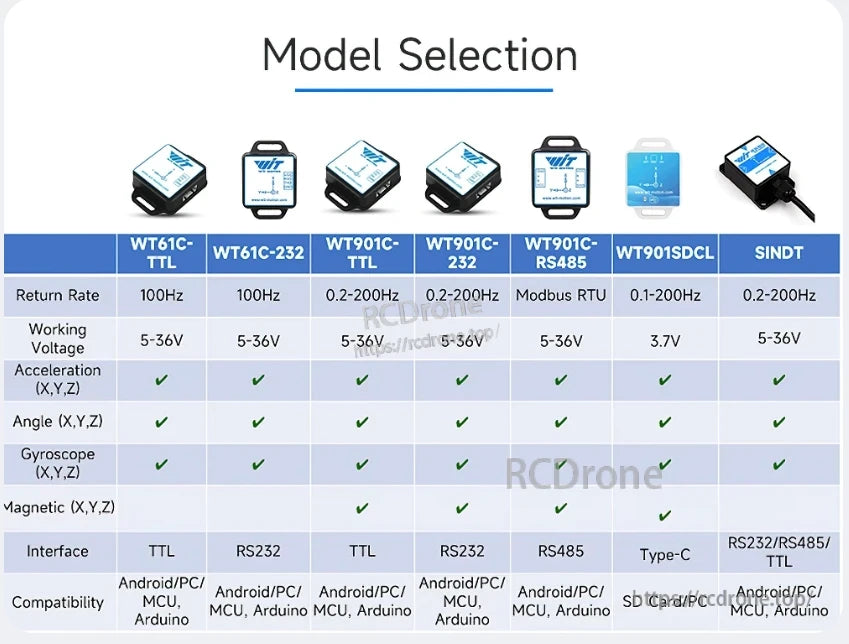
Le WitMotion WT901B AHRS (MPU9250) intègre un accéléromètre à 3 axes, un gyroscope à 3 axes, un magnétomètre à 3 axes et un baromètre pour fournir des données sur l'angle, l'accélération, la vitesse angulaire, le champ magnétique, la pression atmosphérique et l'altitude. Un MCU de 48 MHz avec régulation LDO et un algorithme de fusion + filtre de Kalman en interne offre des sorties à faible bruit et stables pour la robotique, la surveillance structurelle, les machines mobiles et les dispositifs VR/consommateurs.
Caractéristiques clés
-
IMU à 10 axes + baromètre avec calcul d'altitude (précision relative ±0.06 hPa)
-
Précision de l'angle : X/Y 0.05° (statique), 0.1° (dynamique); Inclinaison 1° (calibré, faible interférence)
-
Sortie configurable 0.2–200 Hz; démarrage ≈ 1000 ms
-
Interfaces: UART (4800–230400 bps), I²C (open-drain; nécessite des pull-ups de 4,7 kΩ)
-
Alimentation 3.3–5.5 V, typique 12 mA @5 V, veille 15 µA
-
Robuste: −40–85 °C fonctionnement, 20,000 g résistance aux chocs
-
Logiciel Windows gratuit (courbes en temps réel, enregistrement au format TXT), calibration magnétique visuelle, démo 3D (source disponible sur demande)
-
Certifications : Rapport d'étalonnage, RoHS, CE, ISO9001
Spécifications de l'angle de roulis/angle de tangage
| Paramètre | Condition | Typique |
|---|---|---|
| Plage | — | X: ±180°, Y: ±90° |
| Inclinaison | Statique / Dynamique | 0.1° / 0.5° |
| Résolution | Horizontal | 0.0055° |
| Dérive Temp | −40–85 °C | ±0.5–1° |
Spécifications de l'orientation (Yaw)
| Article | État | Typique |
|---|---|---|
| Plage | — | Z: ±180° |
| Résolution | Horizontal | 0.0055° |
| Précision& | 9 axes (dynamique/statique) | 1° (calibré, loin des interférences) |
| 6 axes (statique) | 0.5° erreur cumulative intégrale |
Spécifications techniques du capteur
Accéléromètre
| Plage | Résolution | Bruitage RMS (100 Hz) | Dérive statique | Dérive de température | Largeur de bande |
|---|---|---|---|---|---|
| ±16 g | 0.0005 g/LSB | 0.75–1 mg-rms | ±20–40 mg | ±0.15 mg/°C | 5–256 Hz |
Gyroscope
| Plage | Résolution | Bruitage RMS (100 Hz) | Dérive statique | Dérive de température | Largeur de bande |
|---|---|---|---|---|---|
| ±2000 °/s | 0.061 (°/s)/LSB | 0.028–0.07 (°/s)-rms | ±0.5–1 °/s | ±0.005–0.015 (°/s)/°C | 5–256 Hz |
Magnétomètre & Baromètre
| Plage du magnétomètre | Résolution du magnétomètre | Plage du baromètre | Bruitage RMS | Précision relative |
|---|---|---|---|---|
| ±2 Gauss | 0.0667 mGauss/LSB | 300–1100 hPa | 0.5 Pa-RMS | ±0.06 hPa |
Module & Électrique
| Article | Min | Par défaut | Max |
|---|---|---|---|
| Taux de sortie | 0.2 Hz | 10 Hz | 200 Hz |
| Tension d'entrée | 3.3 V | 5 V | 5.5 V |
| Courant de fonctionnement (5 V) | — | 12 mA | — |
| Courant de veille (5 V) | — | 15 µA | — |
| Température de fonctionnement | −40 °C | — | 85 °C |
| Température de stockage | −40 °C | — | 100 °C |
Dimensions &et Pinout
Taille (mm): A 15.24 × B 15.24 × C 2.54 × D 12.7 × E 2
Axes: X→droite, Y→haut, Z→hors du PCB (règle de la main droite)
Broches (1–12):
D0, VCC(3.3–5 V), RX(TTL in), TX(TTL out), GND, D1(Support GPS), D2(Alarme/Réinitialisation X+), VCC, SCL(Alarme Y+), SDA(Alarme Y−), GND, D3(Alarme X−)
Connectivité &et Outils
-
UART TX↔RX croisé à MCU
-
I²C avec des résistances de tirage de 4,7 kΩ sur SCL/SDA
-
GPS Externe (câblage NMEA-0183) pour construire une navigation GPS-IMU (sorties latitude/longitude, altitude, cap, vitesse, déplacement)
Logiciel &et Kits de Développement
Suite PC Windows pour configuration, calibration (accéléromètre/magnétomètre/angle/hauteur), sélection de bande passante/taux, et journalisation brute/courbe. Ressources d'exemple pour Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, C/C#; pilotes CH340/CP2102; application Android; vidéos de démonstration; Manual.pdf &et Datasheet.pdf.
Applications
Détection IoT, surveillance environnementale &et surveillance de ponts, robotique &et automatisation, chariots élévateurs et machines mobiles, exploitation minière, électronique grand public, gadgets VR.
Détails

Le baromètre AHRS économique fournit une haute précision pour l'angle de l'axe Z, l'inclinaison, et la pression atmosphérique, ainsi que des mesures d'accélération, d'angle gyroscopique, de hauteur magnétique et de pression atmosphérique.

Le WitMotion WT901B AHRS IMU comprend un accéléromètre, un gyroscope, un magnétomètre et un baromètre. Offre ±16g, ±2000°/s, ±2 Gauss, 300-1100hPa. Haute résolution, faible bruit, large bande passante, stabilité de température de -40°C à +85°C.

L'AHRS IMU WT901B offre ±180° de roulis/ tangage/ lacet, une résolution de 0,0055°, une précision de 1°, un algorithme à 9 axes, UART/IIC, sortie à 200Hz, plage de température de -40°C à 85°C, entrée de 3,3V à 5,5V.
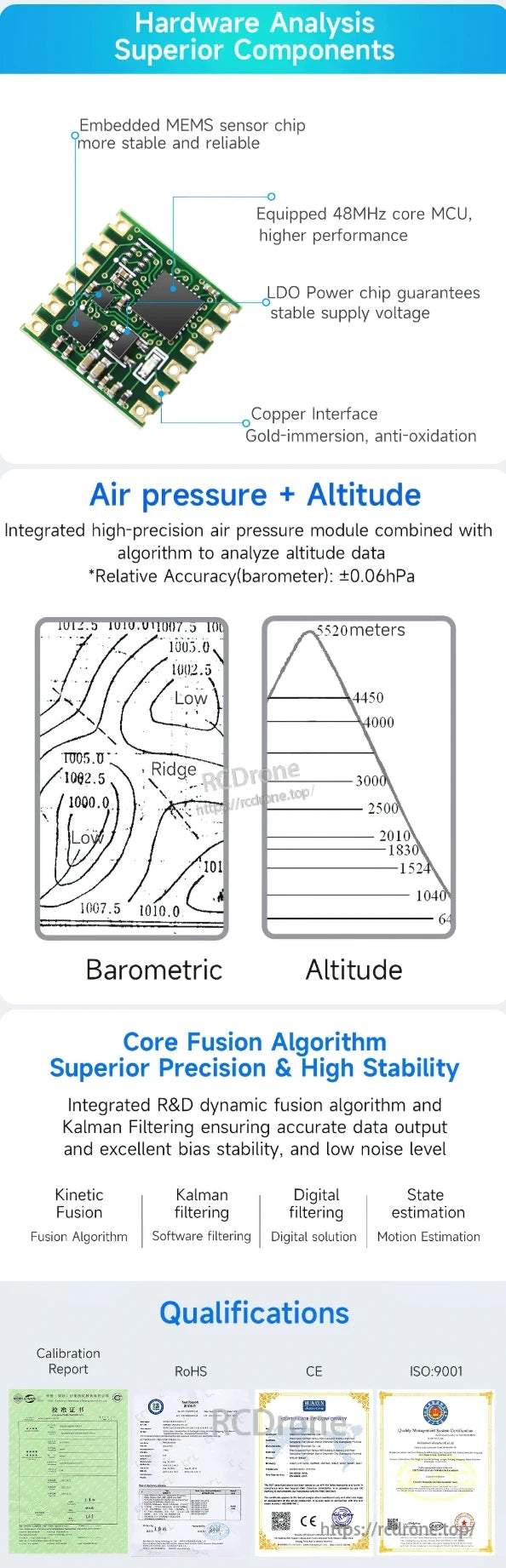
Le WT901B AHRS IMU dispose d'un capteur MEMS, d'un MCU de 48 MHz, d'une puce d'alimentation LDO et d'une interface en cuivre immergée dans l'or. Il offre une précision de pression de ±0,06 hPa, un algorithme de fusion stable et répond aux normes RoHS, CE et ISO:9001.

L'AHRS IMU WT901B utilise l'algorithme WitMotion avec filtre de Kalman pour une grande précision angulaire. Convient pour l'IoT, la réalité virtuelle, la robotique, l'exploitation minière, les ponts et la surveillance environnementale.
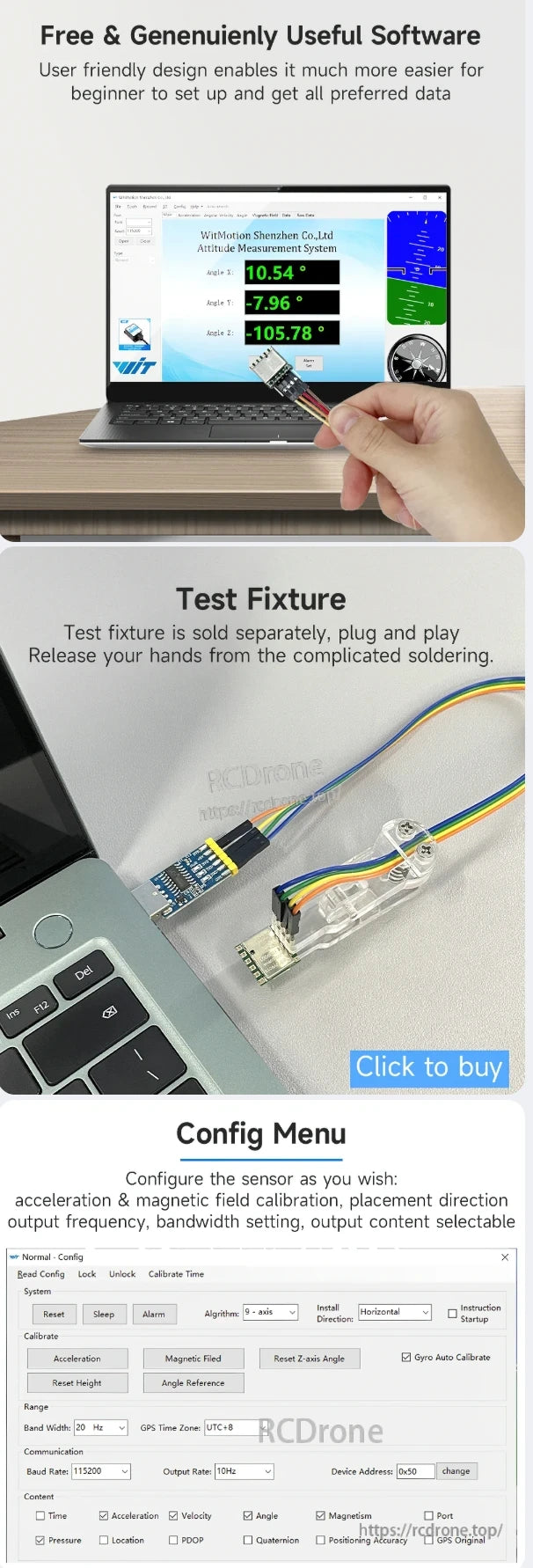
L'AHRS IMU WT901B propose un logiciel gratuit et convivial, un dispositif de test plug-and-play et des paramètres configurables pour l'étalonnage, la sortie et la mesure précise de l'attitude.
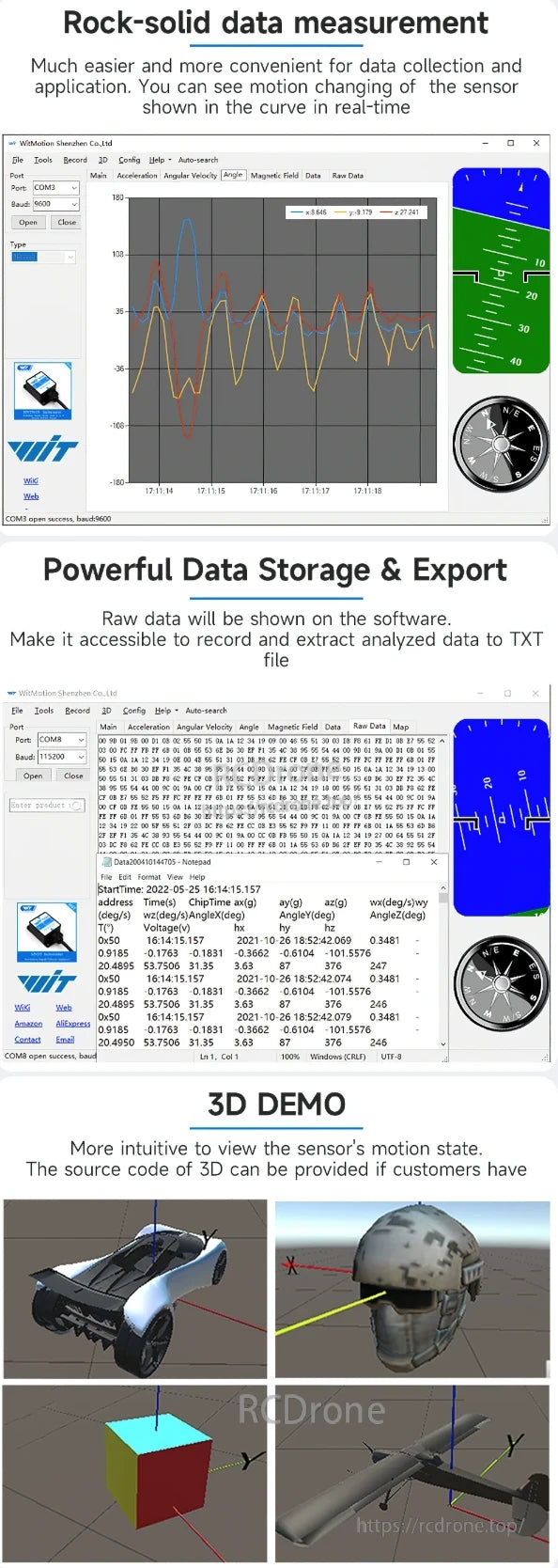
Le WT901B AHRS IMU offre une mesure de données en temps réel, un puissant stockage et une exportation vers des fichiers TXT, ainsi qu'une visualisation intuitive des mouvements en 3D. Les fonctionnalités incluent des données d'accélération, de vitesse angulaire, de champ magnétique et un affichage de la boussole pour un suivi précis des capteurs.

Le WT901B AHRS IMU offre une calibration magnétique visuelle, des connexions MCU TTL/IIC, et une compatibilité GPS. Il fournit la latitude, la longitude, l'altitude, le cap, la vitesse et le déplacement pour la navigation.
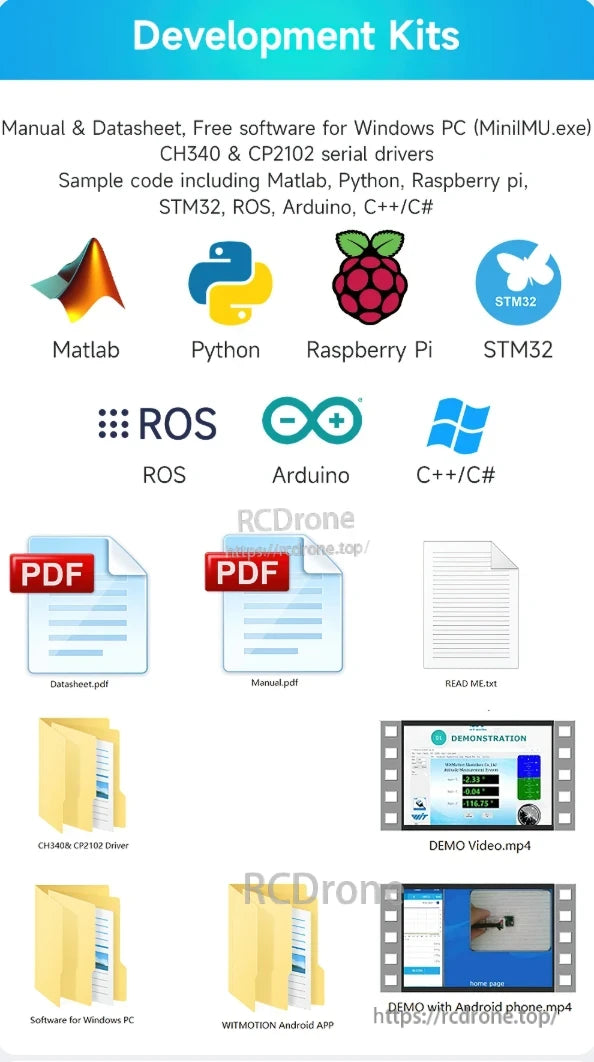
Les kits de développement incluent un manuel, une fiche technique, un logiciel Windows, des pilotes CH340 & CP2102, du code d'exemple pour Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, C++/C#, et des vidéos de démonstration pour Android et PC.
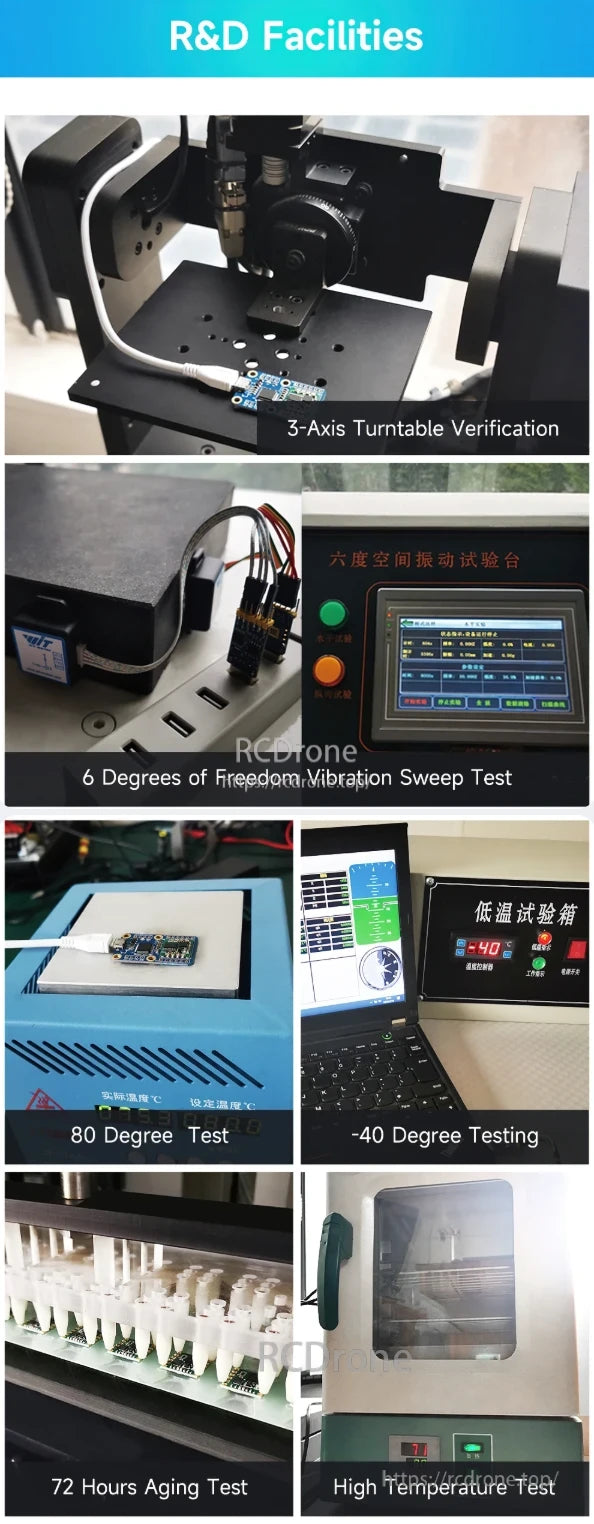
Le WT901B AHRS IMU subit des tests rigoureux : plateau tournant à 3 axes, vibrations à 6 DOF, températures extrêmes (80°C à -40°C), vieillissement de 72 heures, et évaluations à haute température.
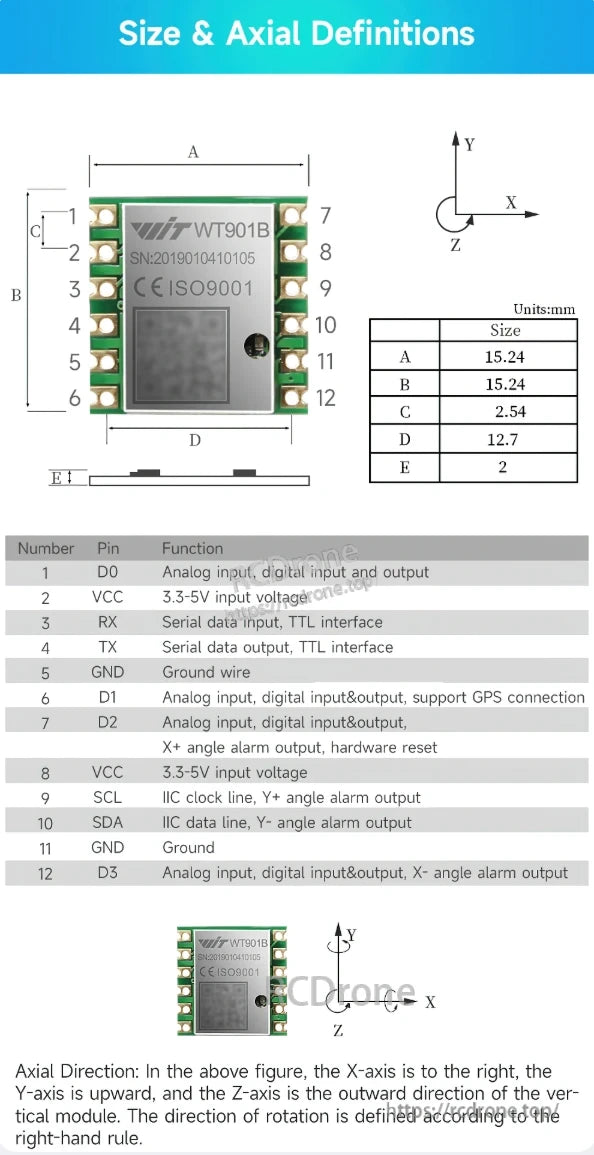
Dimensions du WT901B AHRS IMU : 15,24×15,24×2,54 mm, disposition à 12 broches avec I/O analogique/numérique, UART, I2C, et sorties d'alarme. Les directions axiales sont définies par la règle de la main droite ; X à droite, Y en haut, Z vers l'extérieur.

Le AHRS IMU WT901B de WITMotion comprend un module de capteur, un catalogue, une carte promotionnelle avec des codes QR pour les documents et le support.
Related Collections