












WitMotion WT901C-485 IMU 9 axes Accéléromètre Gyroscope Boussole numérique (RS485/RS232/TTL), Précision angulaire 0,05°, AHRS 0,2–200 Hz
WitMotion WT901C-485 IMU 9 axes Accéléromètre Gyroscope Boussole numérique (RS485/RS232/TTL), Précision angulaire 0,05°, AHRS 0,2–200 Hz
RCDrone
Impossible de charger la disponibilité du service de retrait
Aperçu
Le WitMotion WT901C-485 est un IMU AHRS compact à 9 axes basé sur un capteur triaxial de classe MPU9250 (accéléromètre + gyroscope + magnétomètre) et l'algorithme de fusion/Kalman de WitMotion. Il fournit des sorties d'angle, d'accélération, de vitesse angulaire, de champ magnétique et de quaternion avec une précision statique XY de 0,05° (dynamique 0,1°) et un taux de mise à jour ajustable de 0,2 à 200 Hz. Plusieurs interfaces physiques (RS485/RS232 Modbus & TTL UART) et de larges plages d'entrée rendent le WT901C-485 facile à intégrer avec Arduino/STM32/MCUs, PC et contrôleurs industriels. Un logiciel officiel pour Windows (MiniIMU.exe) fournit des graphiques en temps réel, une démo 3D, l'enregistrement/exportation de données et une calibration magnétique visuelle.
Caractéristiques clés
-
Sorties à 9 axes : angle (Roll/Pitch/Yaw), acc/gyro/mag à 3 axes, quaternion.
-
Haute stabilité &et précision : XY 0,05° statique, 0,1° dynamique; stabilité d'accélération 0,01 g.
-
Entrées/sorties flexibles : TTL / RS232 / RS485 (Modbus); baud 4 800–230 400 (par défaut 9 600).
-
Taux ajustable : 0,2–200 Hz (par défaut 10 Hz).
-
Large alimentation : TTL 3,3–5 V, RS232/RS485 5–36 V; <25 mA typique.
-
Outils &et SDK : application Windows, application Android, pilotes CH340/CP2102, code d'exemple pour C/C++/STM32/Arduino/Matlab.
-
Calibration magnétique &et démo 3D pour la configuration initiale ; graphiques en direct et export TXT.
-
Conception industrielle : –40~85 °C, 51×36×15 mm, montage vertical ou horizontal.
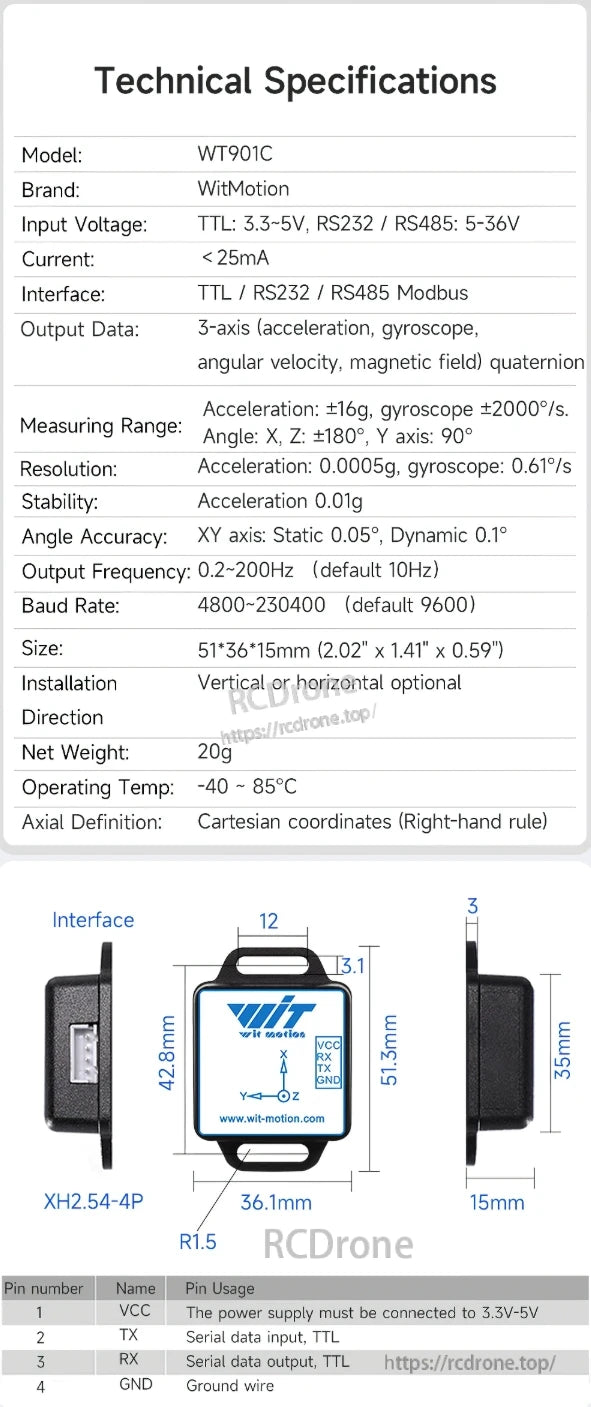
Spécifications techniques
| Article | Spéc |
|---|---|
| Modèle | WT901C (variante WT901C-485) |
| Interfaces | TTL / RS232 / RS485 (Modbus) |
| Tension d'entrée | TTL : 3.3–5 V; RS232/RS485 : 5–36 V |
| Courant | < 25 mA |
| Données de sortie | Accélération, vitesse angulaire, champ magnétique, angle, quaternion |
| Plages de mesure | Acc ±16 g, Gyro ±2000 °/s; Angle : X,Z ±180°, Y 90° |
| Résolution | Acc 0.0005 g, Gyro 0.61 °/s |
| Stabilité | Accélération 0.01 g |
| Précision de l'angle | XY statique 0.05°, dynamique 0.1° |
| Fréquence de sortie | 0.2–200 Hz (par défaut 10 Hz) |
| Taux de transmission | 4,800–230,400 (par défaut 9,600) |
| Taille / poids | 51×36×15 mm, 20 g |
| Température de fonctionnement | –40 ~ 85 °C |
| Axes | Cartésien, règle de la main droite |
| Installation | Verticale ou horizontale |
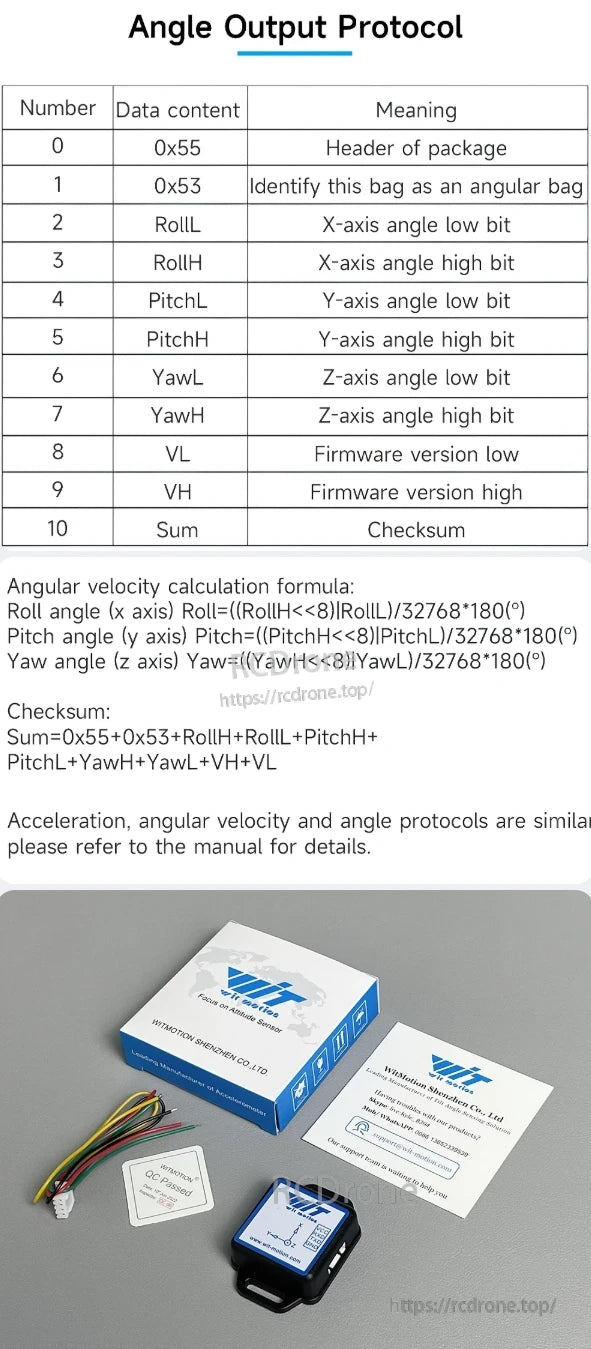
Trame d'angle (0x55 0x53) – protocole de sortie
| Index de l'octet | Contenu | Signification |
|---|---|---|
| 0 | 0x55 | En-tête de paquet |
| 1 | 0x53 | ID de trame “Angle” |
| 2–3 | RollL/RollH | Angle de l'axe X (bas/haut) |
| 4–5 | PitchL/PitchH | Angle de l'axe Y (bas/haut) |
| 6–7 | YawL/YawH | Angle de l'axe Z (bas/haut) |
| 8 | VL | Version du firmware bas |
| 9 | VH | Version du firmware haut |
| 10 | Somme | Checksum |
Décodage d'angle
Roll (°) = ((RollH << 8) | RollL) / 32768 × 180
Pitch (°) = ((PitchH << 8) | PitchL) / 32768 × 180
Yaw (°) = ((YawH << 8) | YawL) / 32768 × 180
Checksum
Somme = 0x55 + 0x53 + RollL + RollH + PitchL + PitchH + YawL + YawH + VL + VH.
(Les cadres d'accélération et de vitesse angulaire suivent le même style de mise en page—voir le manuel.)
Dimensions &et Connecteur
Taille de l'enveloppe : 51 × 36 × 15 mm (H × L × P), avec oreilles de montage ; poids ≈ 20 g.
Connecteur : XH2.54-4P (en-tête de carte sur le capteur).
Configuration des broches (version TTL)
| Broche | Nom | Description |
|---|---|---|
| 1 | VCC | Entrée d'alimentation 3.3–5 V |
| 2 | TX | Entrée de données série, niveau TTL |
| 3 | RX | Sortie de données série, niveau TTL |
| 4 | GND | Terre |
Remarques : Utilisez des niveaux TTL pour une intégration directe avec le MCU. Les variantes RS232/RS485 utilisent leurs niveaux de tension et normes de câblage respectifs.
Logiciel &et outils
-
MiniIMU.exe (Windows) : configuration (algorithme, direction d'installation, plages, bande passante), graphiques en temps réel, vue brute/hex, enregistrement de données et export TXT.
-
Démo 3D : visualisez l'orientation en temps réel (source disponible).
-
Calibration magnétique visuelle : assistant d'ajustement d'ellipse pour éliminer le biais (recommandé pour la première utilisation).
-
Pilotes &et code : pilotes CH340/CP2102 ; exemples pour STM32, Arduino, C/C++, Matlab ; application Android ; vidéos de démonstration PC/téléphone.
Applications typiques
Automatisation et robotique, plateformes de nivellement, surveillance de l'angle d'inclinaison, surveillance des vibrations, électronique grand public, intégration de systèmes IoT, tests industriels, casques VR/AR.
Détails

IMU AHRS économique avec une précision de 0,05° sur les axes X et Y. Comprend des fonctions d'inclinaison, de vibration, de détection d'attitude utilisant l'algorithme de fusion WitMotion. Inclut des fonctions d'accélération, de gyroscope, d'angle, magnétique, de filtrage de Kalman et de quaternion.
Le capteur IMU WitMotion WT901C offre une accélération à 3 axes, un gyroscope, une vitesse angulaire et une détection de champ magnétique. Il prend en charge les interfaces TTL/RS232/RS485, a une plage d'accélération de ±16g, un gyroscope de ±2000°/s, une précision d'angle statique de 0,05° et fonctionne entre -40°C et 85°C.

Le capteur IMU WitMotion WT901C offre de l'automatisation, des casques VR, un nivellement et une surveillance des vibrations. Les applications incluent l'électronique grand public, l'intégration IoT, les tests industriels et la réalité augmentée/virtuelle. Un logiciel gratuit fournit une mesure d'attitude conviviale avec des données d'angle en temps réel.
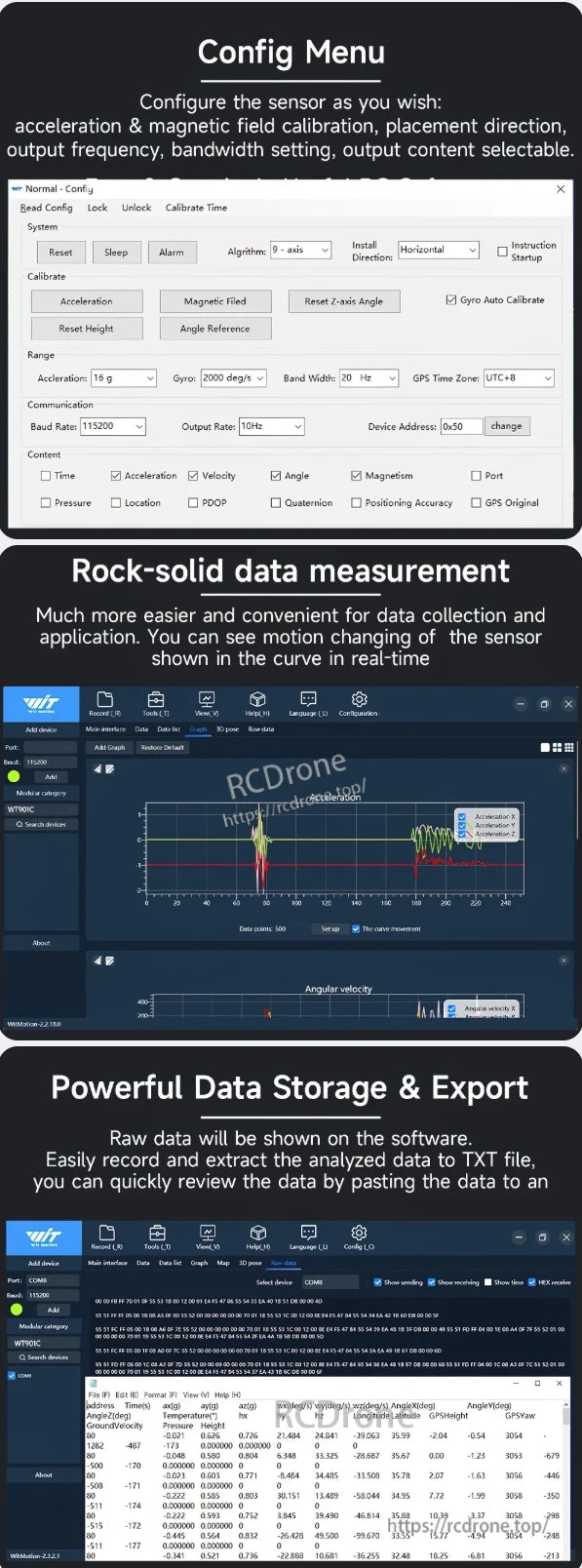
Le capteur IMU WitMotion WT901C offre des paramètres configurables pour l'accélération, le champ magnétique et l'orientation. Il fournit une visualisation des données en temps réel, une mesure robuste et prend en charge le stockage/exportation des données au format TXT pour analyse.
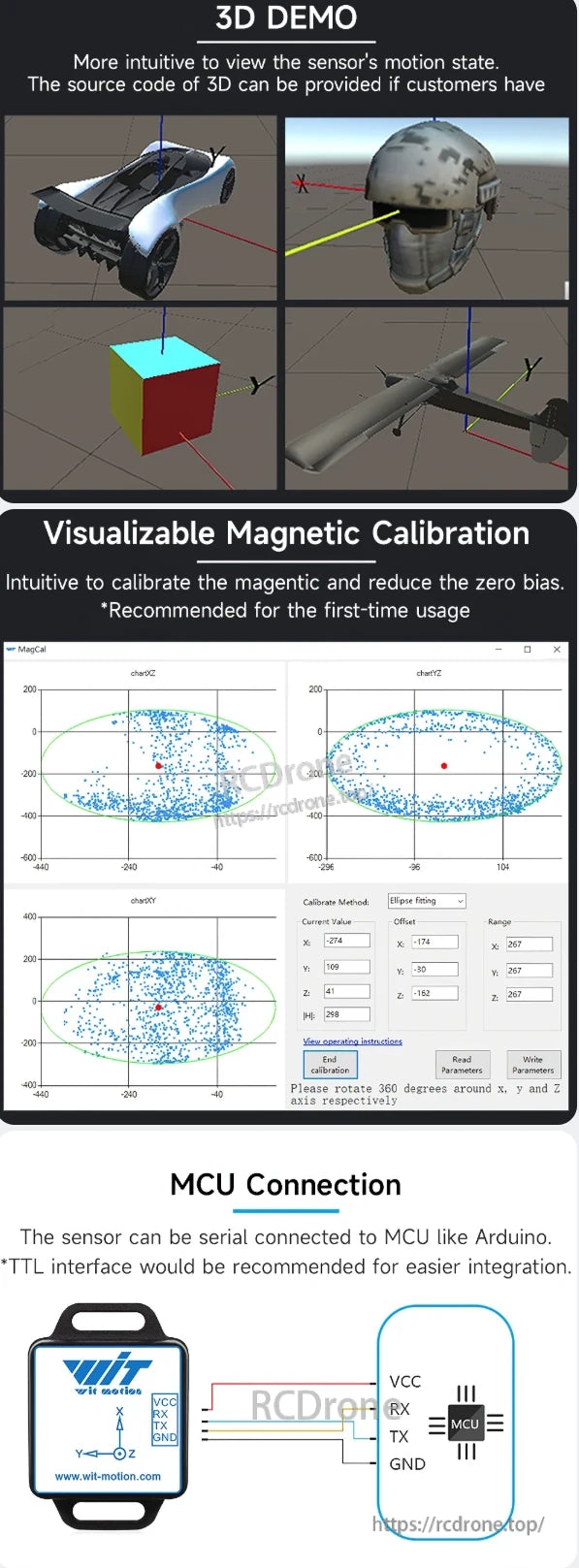
La démonstration 3D visualise le mouvement du capteur avec des modèles de voiture, de casque, de cube et de drone. L'interface de calibration magnétique permet un ajustement intuitif. Les détails de connexion MCU présentent une interface TTL pour Arduino, avec des broches VCC, RX, TX, GND étiquetées.

Les kits de développement incluent un logiciel Windows gratuit, des pilotes, des manuels et des codes d'exemple pour STM32, Arduino, C++, MATLAB. Comprend des PDF, des vidéos de démonstration et un support d'application Android pour le capteur IMU WT901C.
Détails du protocole de sortie d'angle du capteur IMU WT901C : structure des données, calculs angulaires, formule de somme de contrôle, emballage. Comprend les angles de roulis, de tangage, de lacet, la version du firmware et la somme de contrôle.
Related Collections












