









WitMotion WT901C 9 axes AHRS IMU — Accéléromètre, gyroscope, magnétomètre avec angle & quaternion, précision 0,05°, 0,2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion WT901C 9 axes AHRS IMU — Accéléromètre, gyroscope, magnétomètre avec angle & quaternion, précision 0,05°, 0,2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion
Impossible de charger la disponibilité du service de retrait
Aperçu
Le WitMotion WT901C est un IMU AHRS compact à 9 axes qui fusionne un accéléromètre 3 axes, un gyroscope 3 axes et un magnétomètre 3 axes avec le filtrage de fusion/Kalman de WitMotion pour fournir des angles (roulis/ tangage/ lacet), vitesse angulaire, accélération, champ magnétique et quaternion. Il offre une précision statique XY de 0,05° (0,1° dynamique), prend en charge des taux de mise à jour de 0,2 à 200 Hz, et communique via TTL, RS232 ou RS485 (Modbus)—idéal pour la mesure d'inclinaison, de vibration et d'attitude dans l'automatisation, les plateformes de nivellement, la VR/AR et les tests industriels.
Caractéristiques clés
-
AHRS de haute précision: précision statique XY 0,05°, dynamique 0,1°; axes cartésiens de droite.
-
Large I/O & tension: TTL 3.3–5 V, RS232/RS485 5–36 V, baud 4 800–230 400 (par défaut 9 600).
-
Sortie configurable: 0,2–200 Hz (par défaut 10 Hz); contenu sélectionnable par l'utilisateur.
-
Données complètes à 9 axes: Accélération, vitesse angulaire, champ magnétique, angle &et quaternion.
-
Outils de visualisation: Logiciel Windows MiniIMU avec graphiques en temps réel, enregistrement/exportation de données brutes (TXT), démonstration de mouvement 3D, et calibration magnétique visuelle.
-
Ressources pour développeurs: Pilotes (CH340/CP2102), manuels/fiches techniques, code d'exemple pour 51/C++/STM32/Arduino/Matlab, et application Android.
-
Installation flexible: Montage vertical ou horizontal; compact 51 × 36 × 15 mm, ~20 g.
html
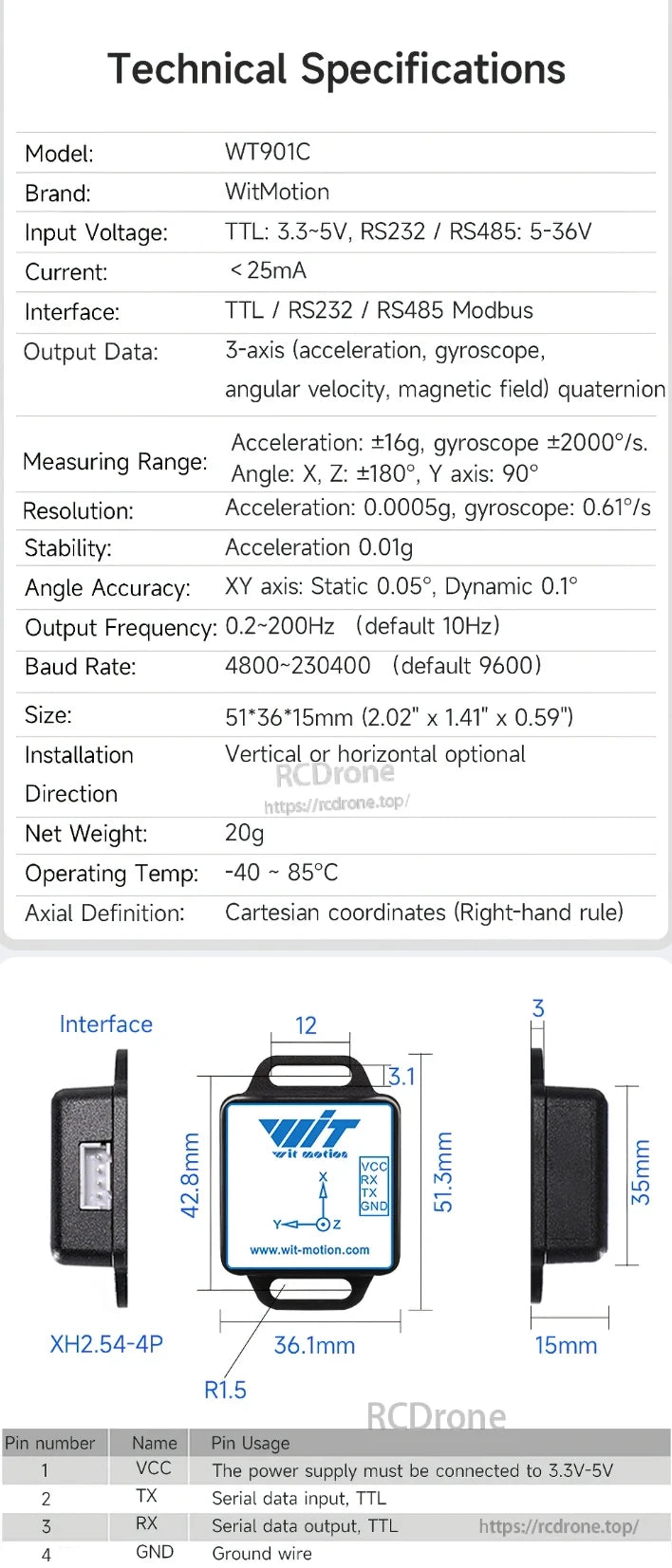
Spécifications techniques
-
Modèle/Marque : WT901C / WitMotion
-
Interfaces : TTL / RS232 / RS485 (Modbus)
-
Tension d'entrée : TTL : 3.3–5 V ; RS232/RS485 : 5–36 V
-
Courant : < 25 mA
-
Données de sortie : 3 axes accélération, gyroscope (vitesse angulaire), champ magnétique, angle, quaternion
-
Plage de mesure : Acc ±16 g; Gyro ±2000 °/s; Angle X,Z ±180°, Y 90°
-
Résolution : Acc 0.0005 g; Gyro 0.61 °/s
-
Stabilité : Acc 0. 01 g
-
Précision angulaire : XY statique 0,05°, dynamique 0,1°
-
Fréquence de sortie : 0,2–200 Hz (par défaut 10 Hz)
-
Taux de baud : 4 800–230 400 (par défaut 9 600)
-
Taille / Poids : 51 × 36 × 15 mm / ≈ 20 g
-
Température de fonctionnement : −40 ~ 85 °C
-
Définition des axes : coordonnées cartésiennes, règle de la main droite
Dimensions &et connecteur (version TTL)
-
Corps : 51,3 mm (H) × 36,1 mm (L) × 15 mm (P); oreilles de montage rayon R1,5
-
Connecteur : XH2.54-4P
-
Pinout (gauche→droite sur l'étiquette VCC/RX/TX/GND):
-
VCC — alimentation 3.3–5 V
-
TX — Entrée de données série, TTL
-
RX — Sortie de données série, TTL
-
GND — terre
-
Note: Le graphique des axes est imprimé sur le boîtier (X↑, Y→, Z•), facilitant l'alignement.
Protocole de sortie d'angle (trame 0x55 0x53)
| Octet | Contenu | Signification |
|---|---|---|
| 0 | 0x55 | En-tête |
| 1 | 0x53 | ID de trame d'angle |
| 2–3 | RollL/RollH | Angle de l'axe X |
| 4–5 | PitchL/PitchH | Angle de l'axe Y |
| 6–7 | YawL/YawH | Angle de l'axe Z |
| 8–9 | VL/VH | Version du firmware (basse/haute) |
| 10 | Somme | Checksum |
Conversion d'angle :Roulement = ((RollH<<8)|RollL)/32768*180°Inclinaison = ((PitchH<<8)|PitchL)/32768*180°Girage = ((YawH<<8)|YawL)/32768*180°
(Les cadres d'accélération et de vitesse angulaire sont similaires ; voir le manuel.)
Logiciel &et outils
-
Windows (MiniIMU.exe): configuration de l'appareil (plages, bande passante, taux de sortie), graphiques en temps réel, vue des données brutes, visualisation de la pose 3D, exportation vers TXT.
-
Calibration de l'IMU : flux de travail d'ajustement d'ellipse visuelle pour réduire le biais (rotation autour de X/Y/Z).
-
Intégration MCU : connexion série directe ; TTL recommandé pour un raccordement simple au MCU (Arduino/STM32, etc.).
-
Ressources incluses : Datasheet.pdf, Manual.pdf, pilotes CH340 &et CP2102, code d'exemple, Application Android, vidéos de démonstration.
Applications typiques
Automatisation | Surveillance d'inclinaison/niveau | Surveillance des vibrations | Niveaux de plateformes | Intégration de systèmes IoT | Tests industriels | casques VR/AR | Électronique grand public.
Détails

IMU AHRS économique avec une précision de 0,05° sur les axes X et Y. Comprend des fonctionnalités d'inclinaison, de vibration et de détection d'attitude utilisant l'algorithme de fusion WitMotion. Inclut accélération, gyroscope, angle, magnétique, filtrage de Kalman et fonctions de quaternion.
Le WitMotion WT901C IMU offre une détection à 3 axes avec accélération, gyroscope et magnétomètre. Fournit une sortie quaternion. Prend en charge TTL, RS232, RS485. Mesure ±16g, ±2000°/s, angles ±180°. Taille compacte de 51×36×15mm. Fonctionne de -40 à 85°C.

Le WitMotion WT901C IMU prend en charge l'automatisation, les casques VR, le nivellement et la surveillance des vibrations. Il est adapté pour l'électronique grand public, l'IoT, les tests industriels et l'AR/VR. Livré avec un logiciel gratuit pour l'affichage des données d'angle en temps réel.

Le menu de configuration de l'IMU WitMotion WT901C permet l'étalonnage des capteurs, les paramètres de sortie des données et la visualisation des mouvements en temps réel. Il prend en charge l'algorithme à 9 axes, l'accélération réglable, le gyroscope, la bande passante et le fuseau horaire GPS. Des graphiques en temps réel montrent l'accélération et la vitesse angulaire pour des mesures précises.
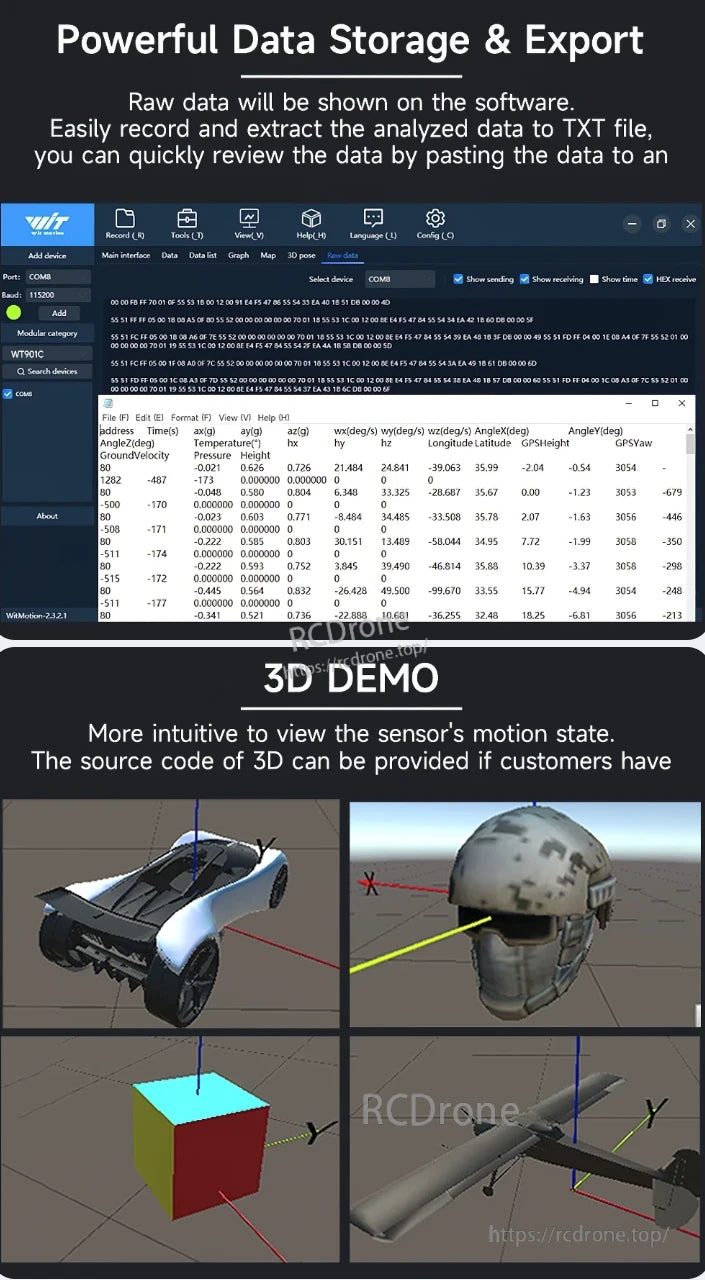
L'IMU WitMotion WT901C offre un stockage de données puissant, une exportation TXT facile et une visualisation des mouvements en 3D avec le code source disponible.
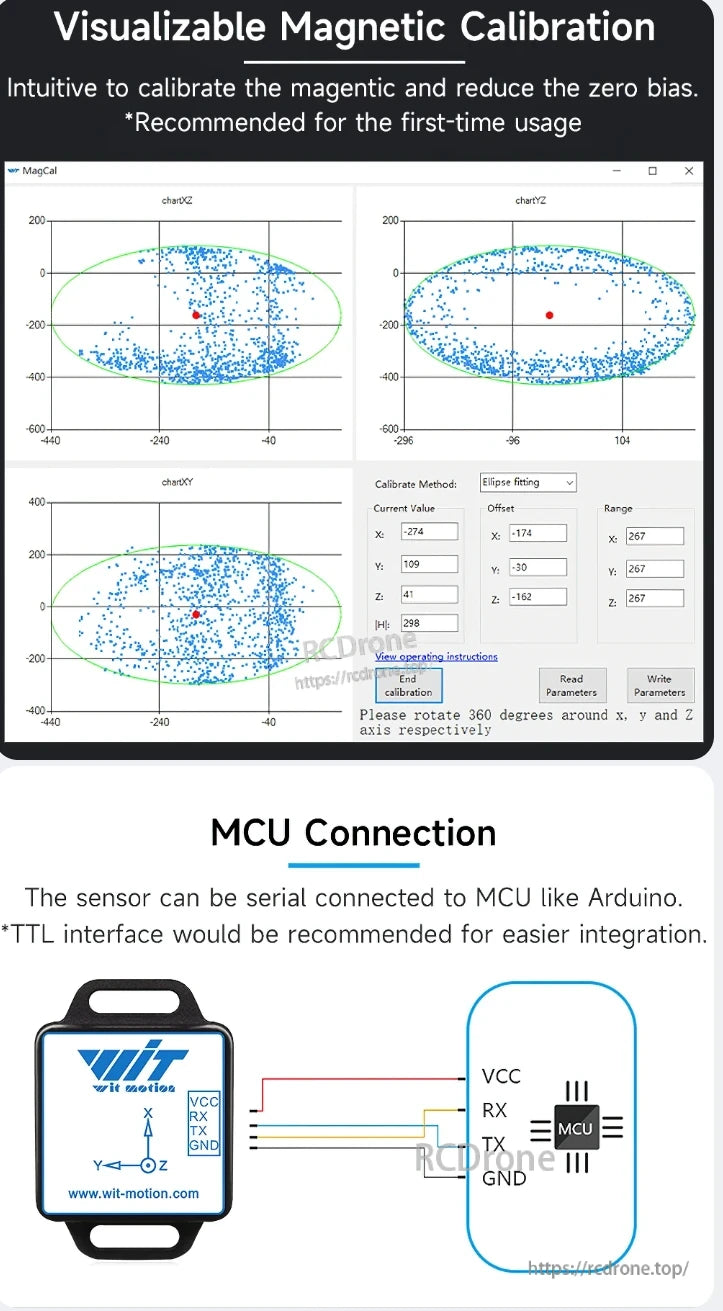
Calibration magnétique visualisable pour l'IMU WT901C avec méthode d'ajustement d'ellipse. Connexion MCU via interface TTL recommandée. Le capteur se connecte à des MCU de type Arduino en utilisant les broches VCC, RX, TX, GND.
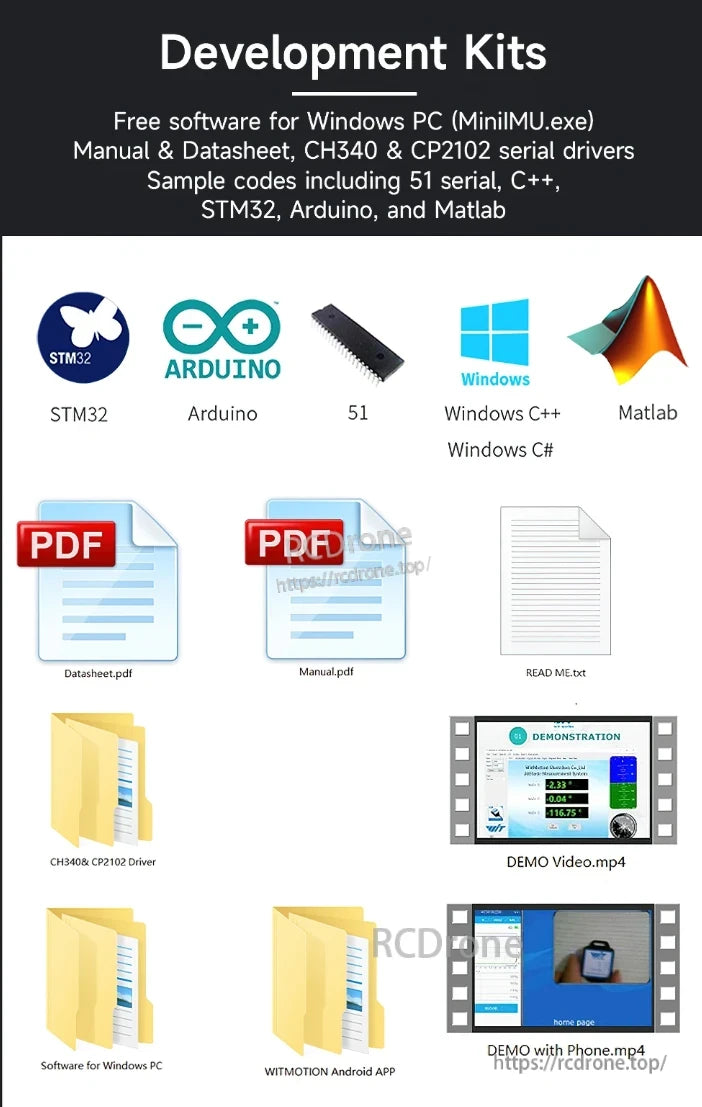
Les kits de développement incluent un logiciel gratuit pour Windows, un manuel, une fiche technique, des pilotes CH340 & CP2102, des codes d'exemple pour 51, C++, STM32, Arduino et Matlab, ainsi que des vidéos de démonstration et une application Android.
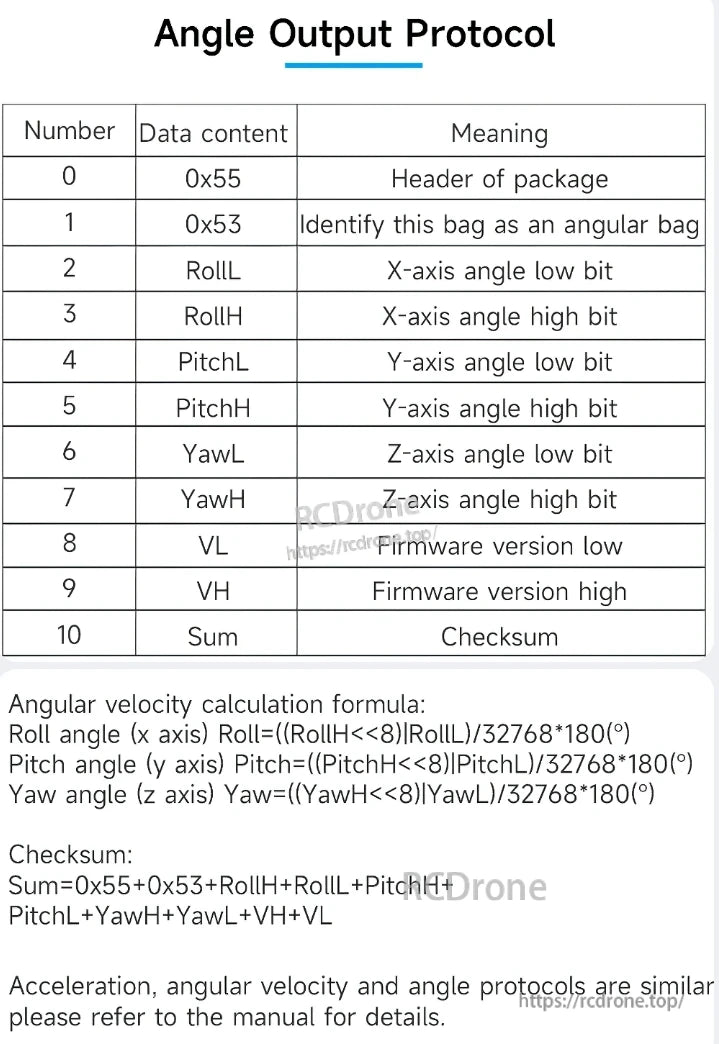
La structure de données pour la sortie d'angle de l'IMU WT901C comprend un en-tête, le roulis, le tangage, le lacet, la version du firmware et la somme de contrôle. Des formules pour les calculs et la vérification sont fournies. Des structures similaires existent pour l'accélération et la vitesse angulaire.
Related Collections









