








Yahboom RDK ROS2 Voiture Robot avec Roues Mecanum, RDK X3/X5 (4Go/8Go), Lidar MS200 TOF
Yahboom RDK ROS2 Voiture Robot avec Roues Mecanum, RDK X3/X5 (4Go/8Go), Lidar MS200 TOF
Yahboom
Impossible de charger la disponibilité du service de retrait
Aperçu
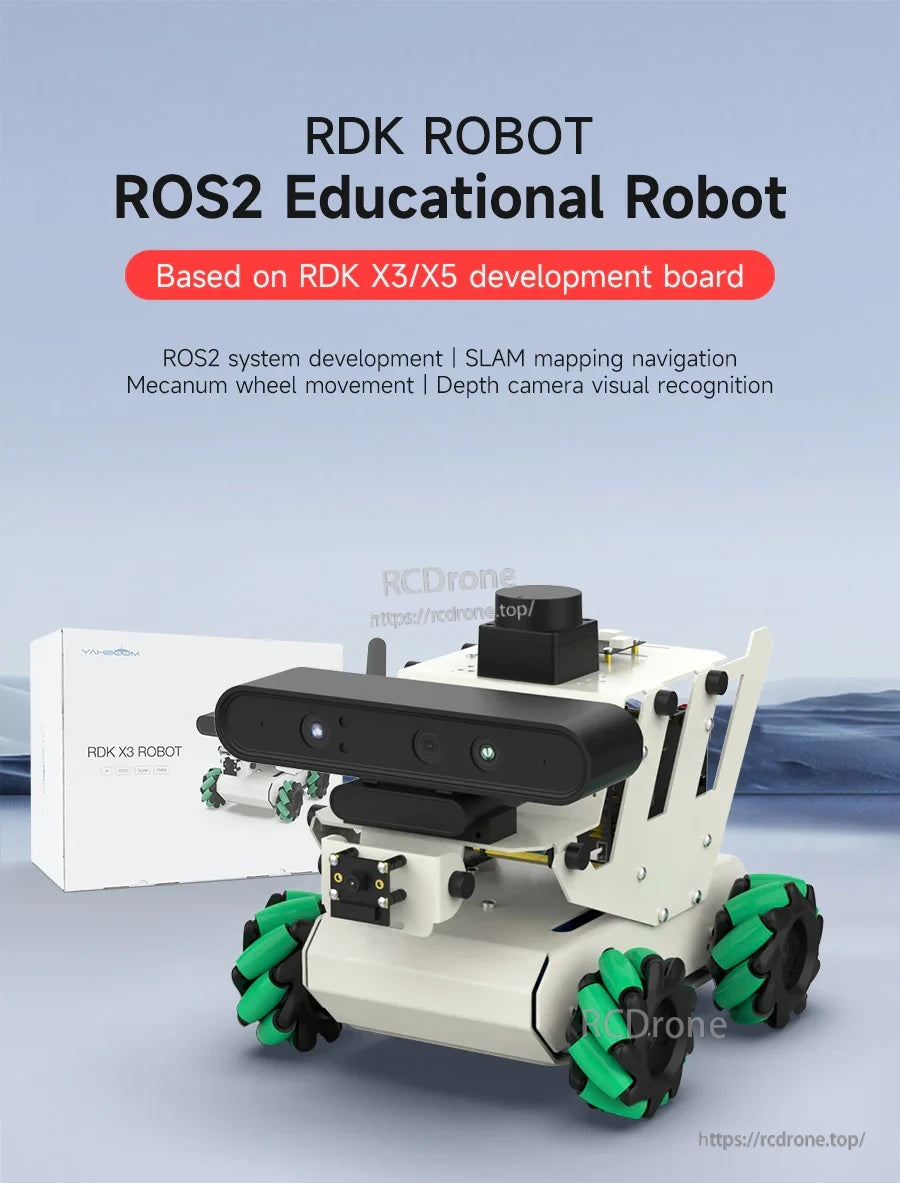
La voiture robot RDK ROS2 est une voiture robot éducative basée sur la carte de développement RDK X3/X5, conçue avec des roues Mecanum pour un mouvement omnidirectionnel flexible. Elle prend en charge le développement du système ROS2 et la navigation par cartographie SLAM, et combine la vision par caméra avec le lidar TOF pour la navigation et l'évitement d'obstacles. Le développement peut être réalisé avec la programmation Python de Jupyter Lab et des algorithmes d'apprentissage profond pour la perception et l'interaction en temps réel.
Pour des questions techniques avant ou après l'achat, contactez [email protected] or visitez https://rcdrone.top/.
Caractéristiques principales
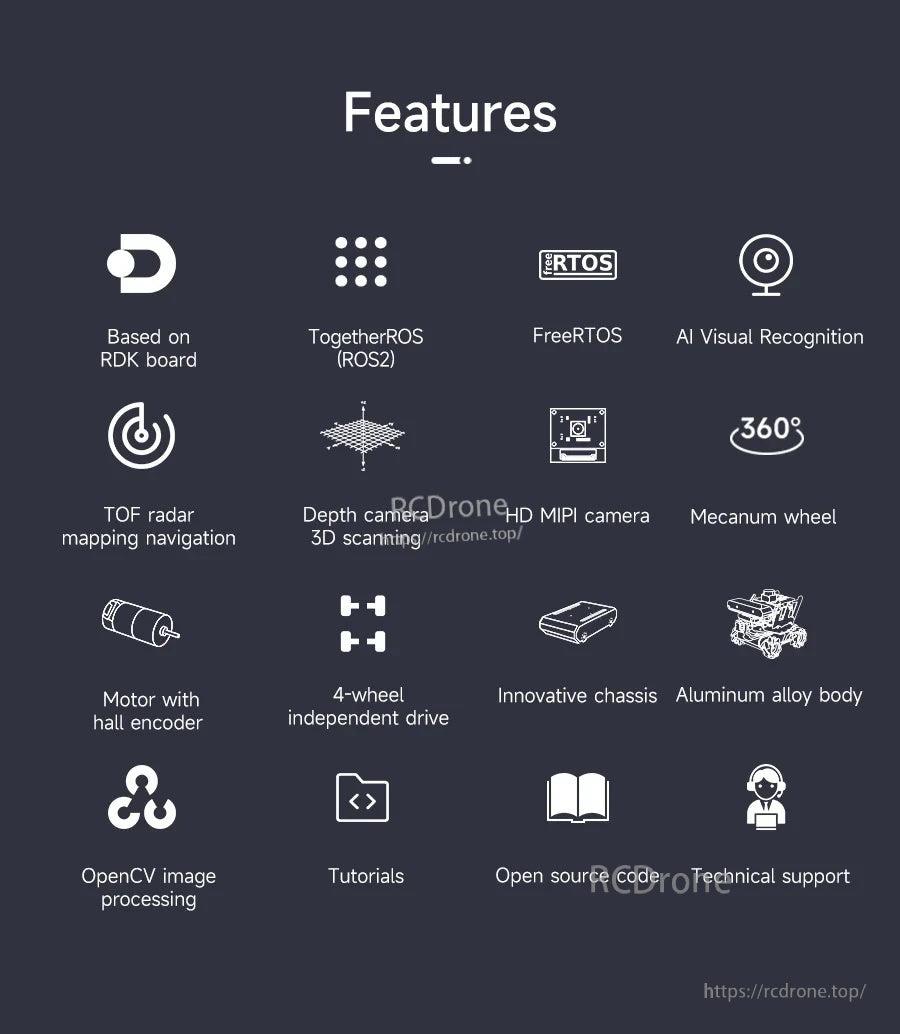
- Basé sur carte RDK; TogetherROS (ROS2); FreeRTOS
- Reconnaissance visuelle par IA; Traitement d'image OpenCV
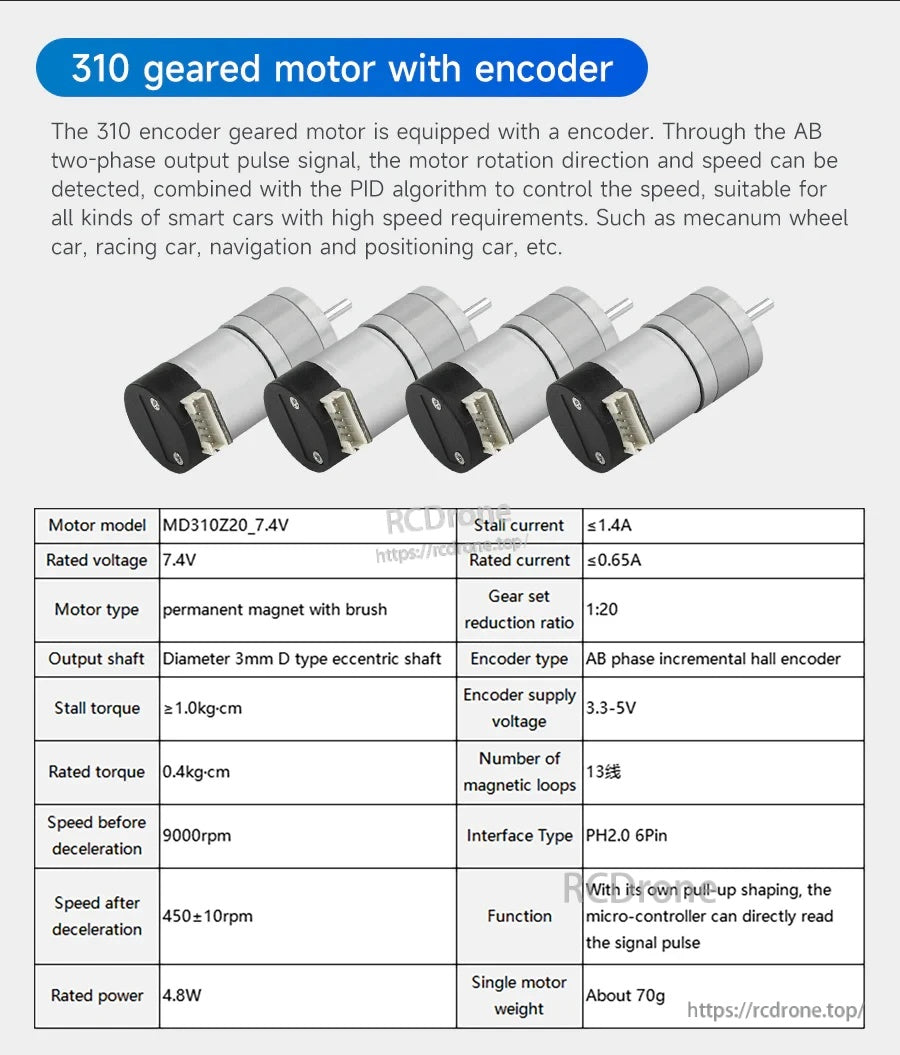
- Mouvement de roue Mecanum (360°); Entraînement indépendant à 4 roues; moteur avec encodeur Hall
- Navigation par cartographie radar TOF; Scan 3D par caméra de profondeur (selon configuration)
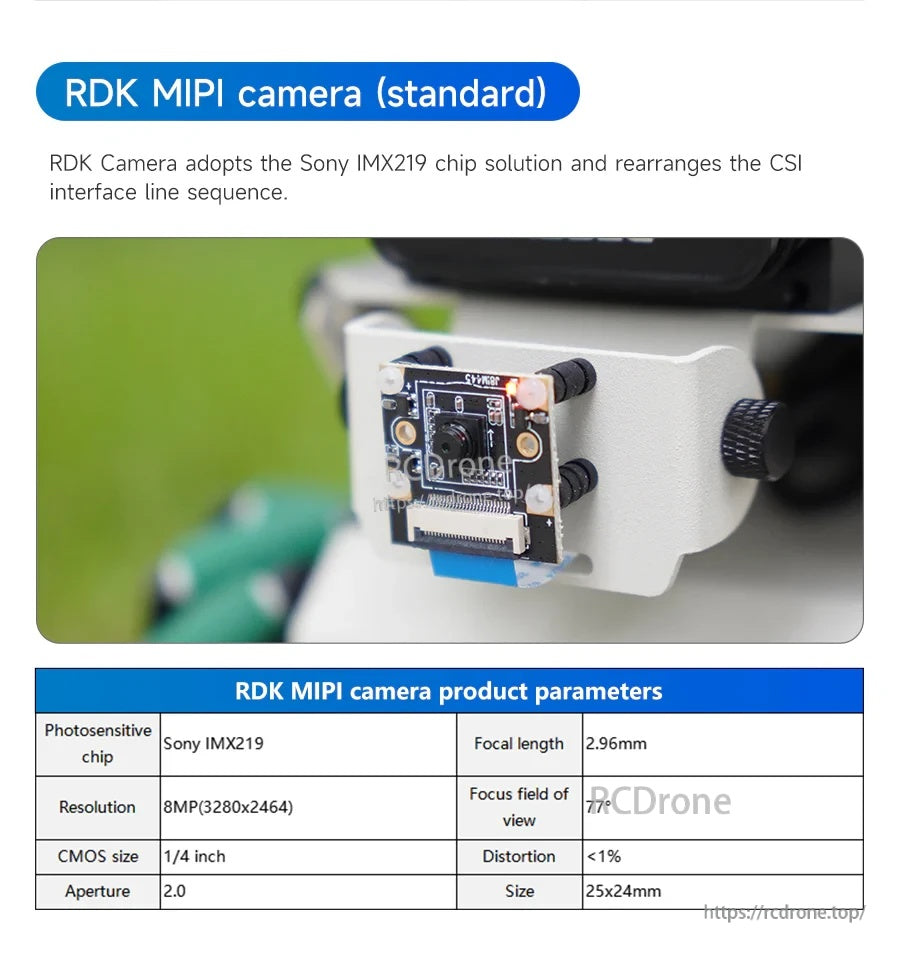
- Caméra HD MIPI
- Corps en alliage d'aluminium; châssis innovant; structure empilée avec câblage interne ordonné
- Multiples méthodes de contrôle : application mobile, manette PS2, clavier d'ordinateur, contrôle Jupyter Lab et contrôle système ROS
- L'application de navigation cartographique prend en charge iOS/Android et prend en charge ROS1/ROS2
Options de configuration (comme listé)
| Version Standard | Caméra de profondeur : Non |
| Version Avancée | Caméra de profondeur : Caméra de profondeur Astra Pro Plus |
| Caméra HD | 8MP HD MIPI camera |
| Lidar | MS200 TOF Lidar |
| Contrôleur ROS | RDK X3 (4GB) / RDK X5 (8GB) |
Fonctions (de la liste des fonctions du produit)
Lidar
- Introduction et utilisation du lidar
- Évitement d'obstacles par lidar
- Suivi par lidar
- Garde par lidar
- Patrouille
- Cartographie Gamapping
- Cartographie Cartographer
- Navigation et évitement
- Cartographie et navigation par APP
Caméra de profondeur
- Utilisation de la caméra de profondeur
- Référence interne de la caméra
- ROS+OpenCV
- Vision AR
- Suivi de couleur
- Suivi d'objet KCF
Caméra MIPI
- Pilotage de la caméra
- Ajustement des valeurs HSV de couleur
- Reconnaissance de couleur
- Suivi de couleur
- Suivi de couleur
- Reconnaissance de code QR
- Détection de visage
- Détection d'objet
- Patrouille de ligne visuelle-OpenCV
- Patrouille de ligne visuelle-Apprentissage profond
- Suivi humain
- Contrôle gestuel
Maître ROS (RDK X3/X5)
- Machine virtuelle
- Fondamentaux de Linux
- Connexion à distance
- Communication multi-machines
- Lier l'ID de l'appareil
- Sauvegarde d'image
OpenCV
- Prise en main avec OpenCV
- Transformation géométrique OpenCV
- Traitement d'image OpenCV
- Embellissement d'image OpenCV
- Création et reconnaissance de code QR
Cours de robotique
- Théorie de l'algorithme PID
- Publication d'informations sur le robot
- Contrôle du robot
- Estimation de l'état du robot
- Calibration du robot
- Suivi de trajectoire du robot
- Modèle URDF
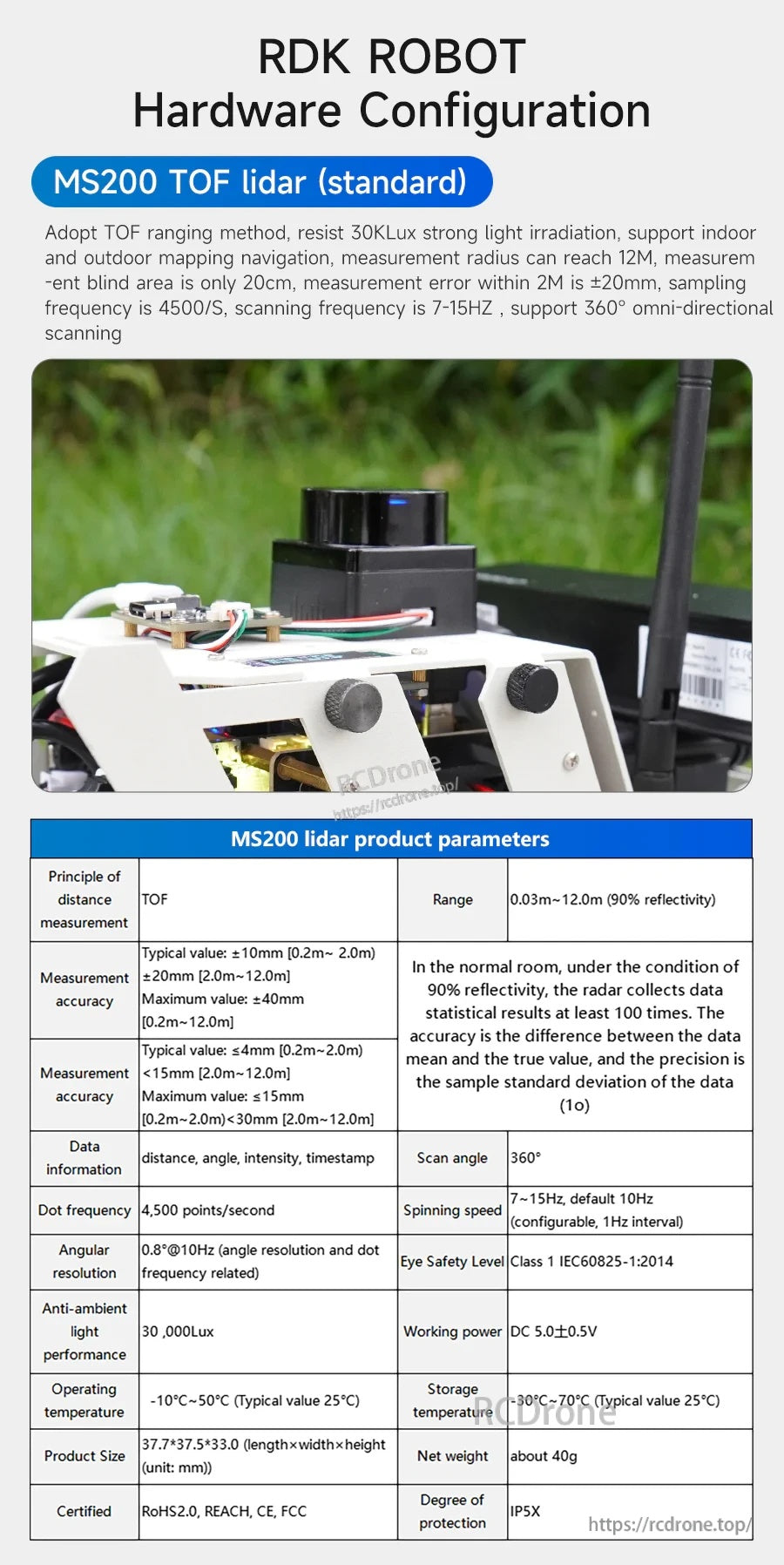
Spécifications du Lidar MS200 TOF (standard)
Adopte la méthode de télémétrie TOF; résiste à une irradiation lumineuse forte de 30KLux; prend en charge la cartographie et la navigation en intérieur et en extérieur; le rayon de mesure peut atteindre 12M; la zone aveugle de mesure est seulement de 20cm; l'erreur de mesure dans les 2M est de ±20mm; fréquence d'échantillonnage de 4500/S; fréquence de balayage de 7-15HZ; prend en charge le balayage omnidirectionnel à 360°.
| Principe de mesure de distance | TOF |
| Plage | 0,03m~12,0m (réflectivité de 90%) |
| Précision de mesure | Valeur typique : ±10mm (0,2m~2,0m); ±20mm (2,0m~12,0m). Valeur maximale : ±40mm (0,2m~12,0m) |
| Précision de mesure | Valeur typique : <=4mm (0,2m~2,0m); <15mm (2,0m~12,0m). Valeur maximale : <=15mm (0,2m~2,0m); <30mm (2,0m~12.0m) |
| Informations sur les données | distance, angle, intensité, horodatage |
| Angle de balayage | 360° |
| Fréquence des points | 4 500 points/seconde |
| Vitesse de rotation | 7~15Hz, par défaut 10Hz (configurable, intervalle de 1Hz) |
| Résolution angulaire | 0,8°@10Hz (résolution angulaire et fréquence des points liées) |
| Niveau de sécurité oculaire | Classe 1 IEC60825-1:2014 |
| Performance anti-lumière ambiante | 30 000Lux |
| Puissance de travail | DC 5.0±0.5V |
| Température de fonctionnement | -10°C~50°C (Valeur typique 25°C) |
| Température de stockage | -30°C~70°C (Valeur typique 25°C) |
| Taille du produit | 37.7*37.5*33.0 (longueur×largeur×hauteur), unité : mm |
| Poids net | environ 40g |
| Certifié | RoHS2.0, REACH, CE, FCC |
| Degré de protection | IP5X |
Spécifications de la caméra de profondeur Astra Pro Plus (en option)
La caméra de profondeur Astra Pro Plus prend en charge le réglage manuel de l'angle d'inclinaison. Elle prend en charge le traitement des données d'image de profondeur et la navigation et cartographie 3D.
| Technologie 3D | Lumière structurée monoculaire ORBBECR |
| Plage de travail | 0,6-8m |
| Précision (Profondeur) | 1m : ±3mm |
| Champ de vision (FOV) (profondeur) | H 58,4° x V 45,8° |
| Resolution@frame rate (profondeur) | 640x480@30FPS; 320x240@30FPS; 160x120@30FPS |
| Resolution@Frame Rate (RGB) | 1920x1080@30FPS; 1280x720@30FPS; 640x480@30FPS |
| Puce de traitement en profondeur | MX6000 |
| Protection rapprochée | soutien |
| Champ de vision (RGB) | H66,1° V40.2° |
| UVC (RGB) | support |
| Systèmes d'exploitation pris en charge | Android / Linux / Windows |
| Interface de données | USB2.0 |
| Taille (mm) | 164.85*48.25*40 |
| Microphone | stéréo à deux canaux |
| Consommation d'énergie | <2.5W |
| Sécurité | Laser de classe 1 |
| Température de fonctionnement | 10°C-40°C |
Versions ROS2 (images système)
- Version voiture RDK X3 : Utilisation de ROS2 Foxy
- Version voiture RDK X5 : Utilisation de ROS2 humble
Vidéo
Manuels
Lien du tutoriel : http://www.yahboom.net/study/RDK-X3-Robot
Détails
Construit sur la plateforme RDK X3/X5, le robot Yahboom RDK ROS2 est conçu pour l'apprentissage SLAM et le mouvement omnidirectionnel mecanum.
Les capacités principales incluent TogetherROS (ROS2), la vision OpenCV, la navigation par cartographie radar TOF, et un châssis en alliage d'aluminium durable.
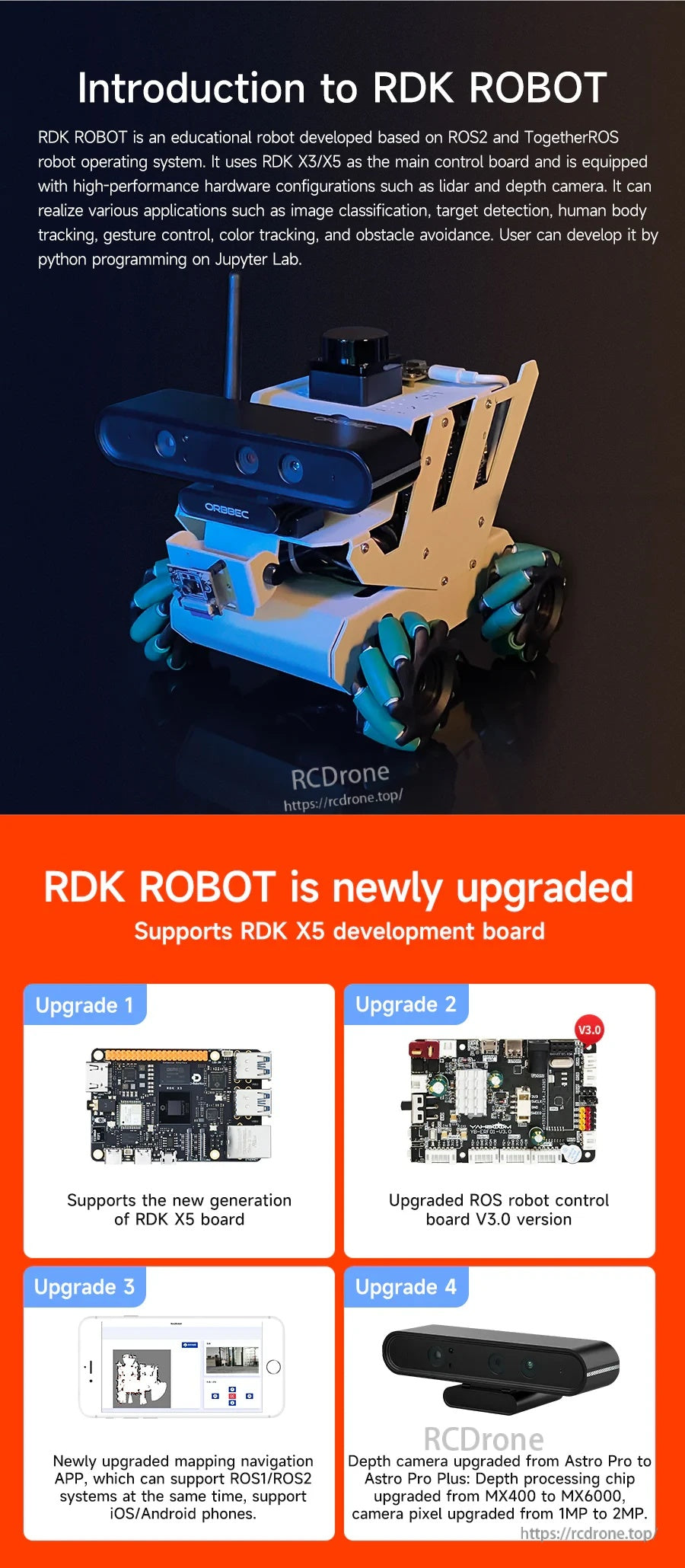
De multiples chemins de mise à niveau prennent en charge les configurations RDK X3 et RDK X5 pour le développement et l'expansion en robotique.
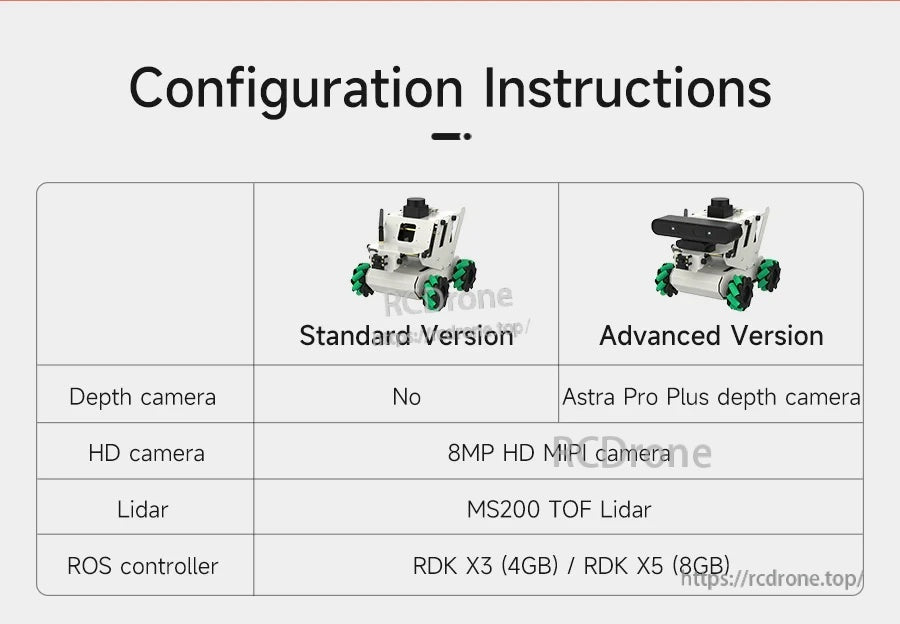
Choisissez le kit standard ou passez à la version avancée avec une caméra de profondeur Astra Pro Plus tout en conservant la même base lidar et caméra HD MIPI.
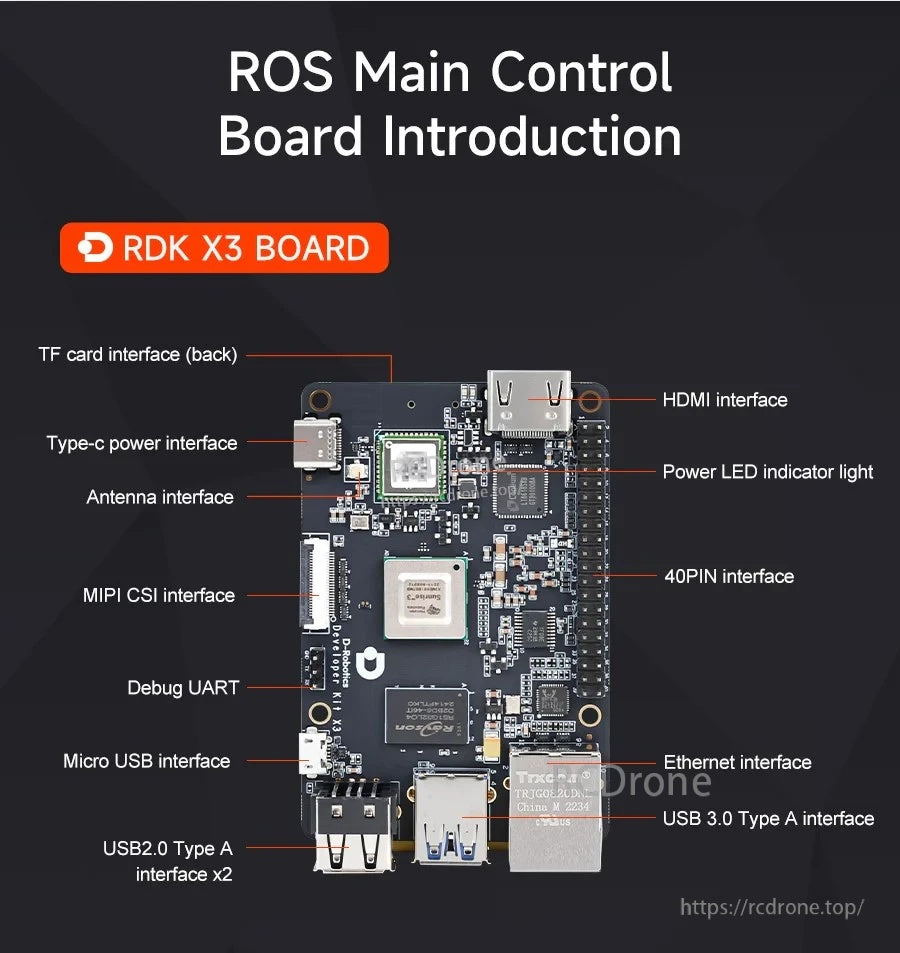
La carte de contrôle RDK X3 riche en E/S prend en charge HDMI, Ethernet, USB, connexion de caméra CSI et une interface à 40 broches pour l'intégration robotique.
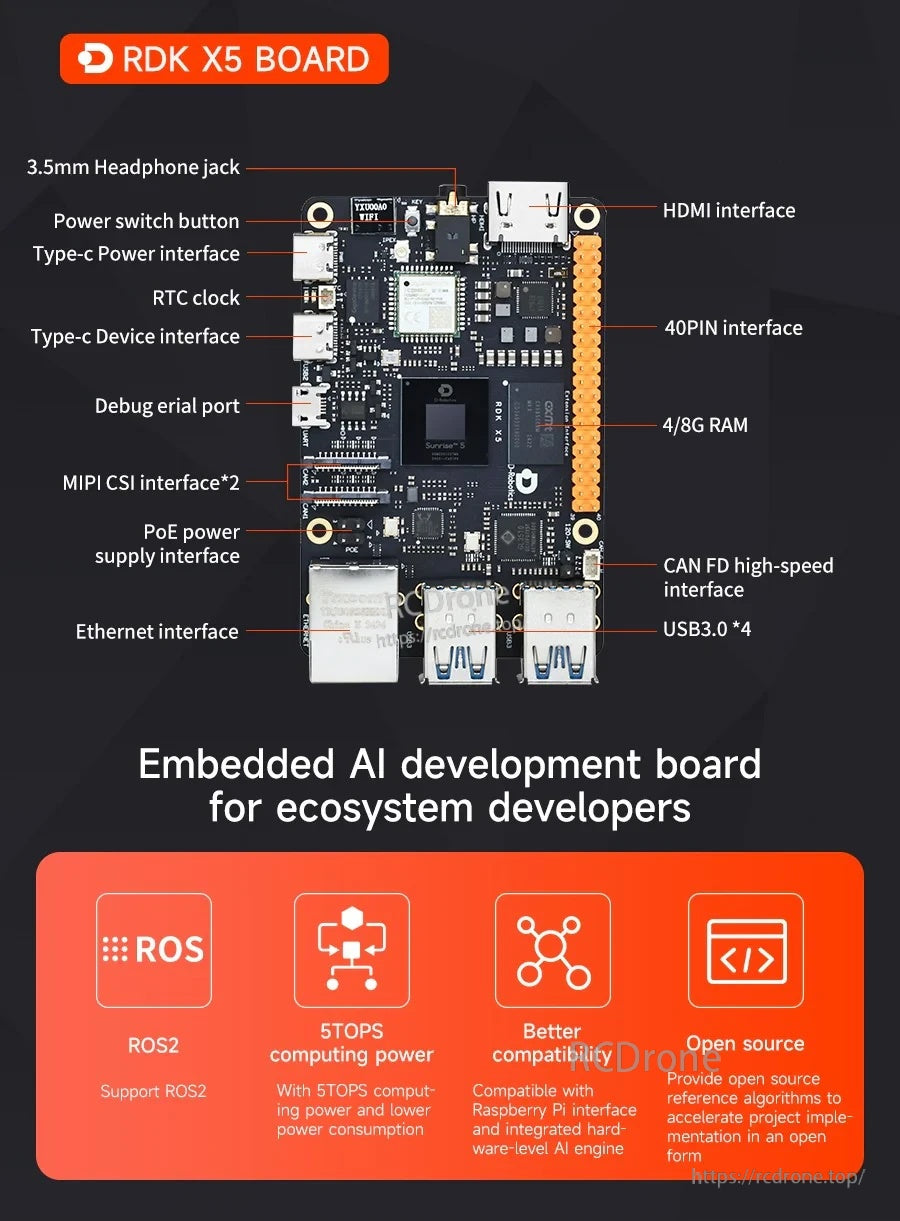
RDK X5 ajoute des options de connectivité et de performance étendues pour les projets ROS2, y compris des interfaces haute vitesse pour les périphériques.
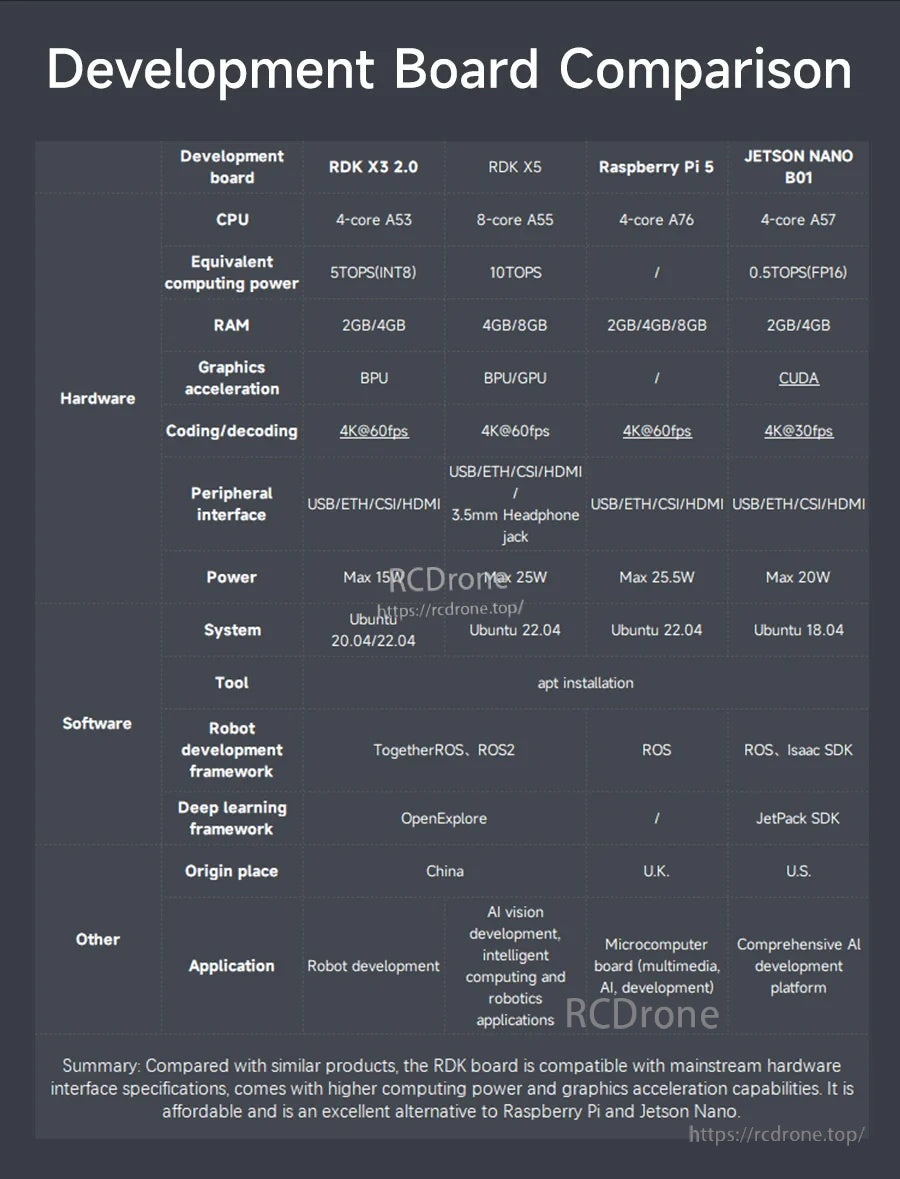
Une comparaison rapide aide à adapter le contrôleur à votre charge de travail, de l'apprentissage de base de ROS aux tâches de perception IA plus exigeantes.
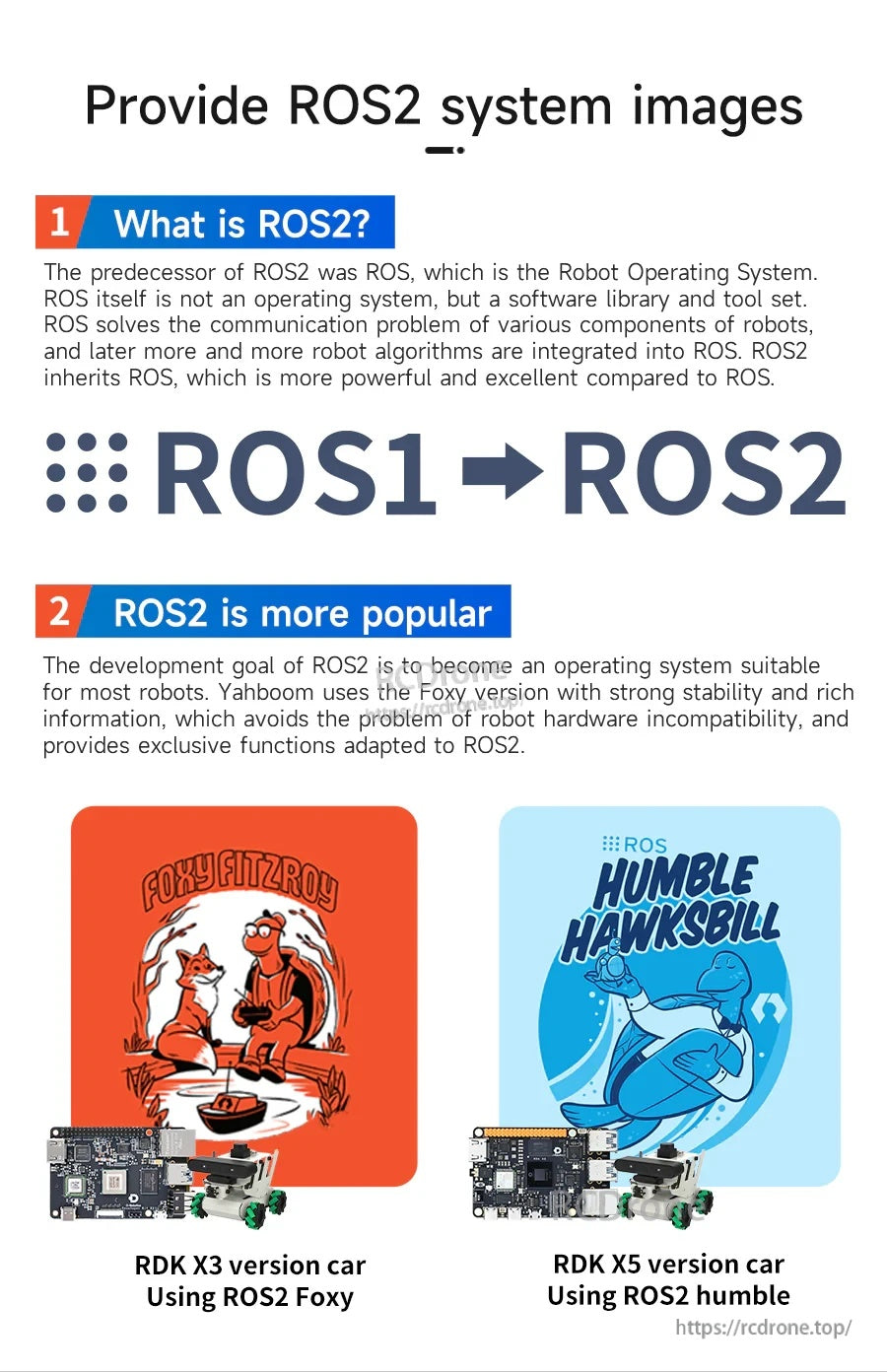
Les images système ROS2 préconstruites simplifient l'installation, avec des options alignées sur les versions courantes de ROS2 pour RDK X3 et RDK X5.

Le lidar MS200 TOF permet des comportements d'évitement d'obstacles et prend en charge les flux de travail de cartographie comme Gmapping et Cartographer.
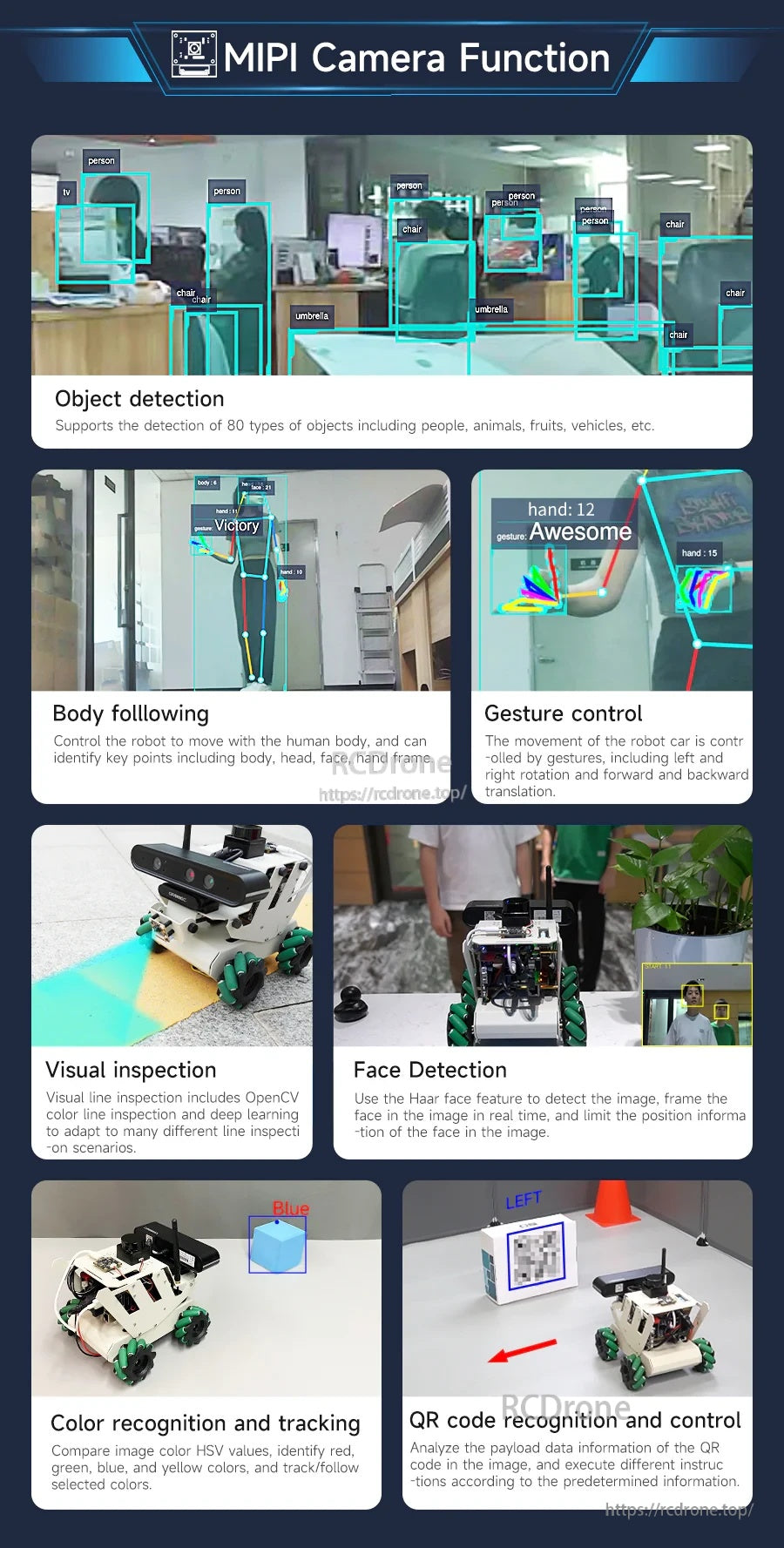
Les fonctionnalités de vision couvrent la détection, le suivi, les gestes et la reconnaissance de QR pour soutenir les démonstrations interactives de perception ROS2.

La détection de profondeur optionnelle étend la cartographie et le suivi 3D, tandis que plusieurs méthodes de contrôle couvrent l'application, le contrôleur à bascule et le clavier.

Une liste de fonctions consolidée décrit la navigation lidar, les modules de vision par caméra, la configuration du maître ROS et le programme d'apprentissage inclus.
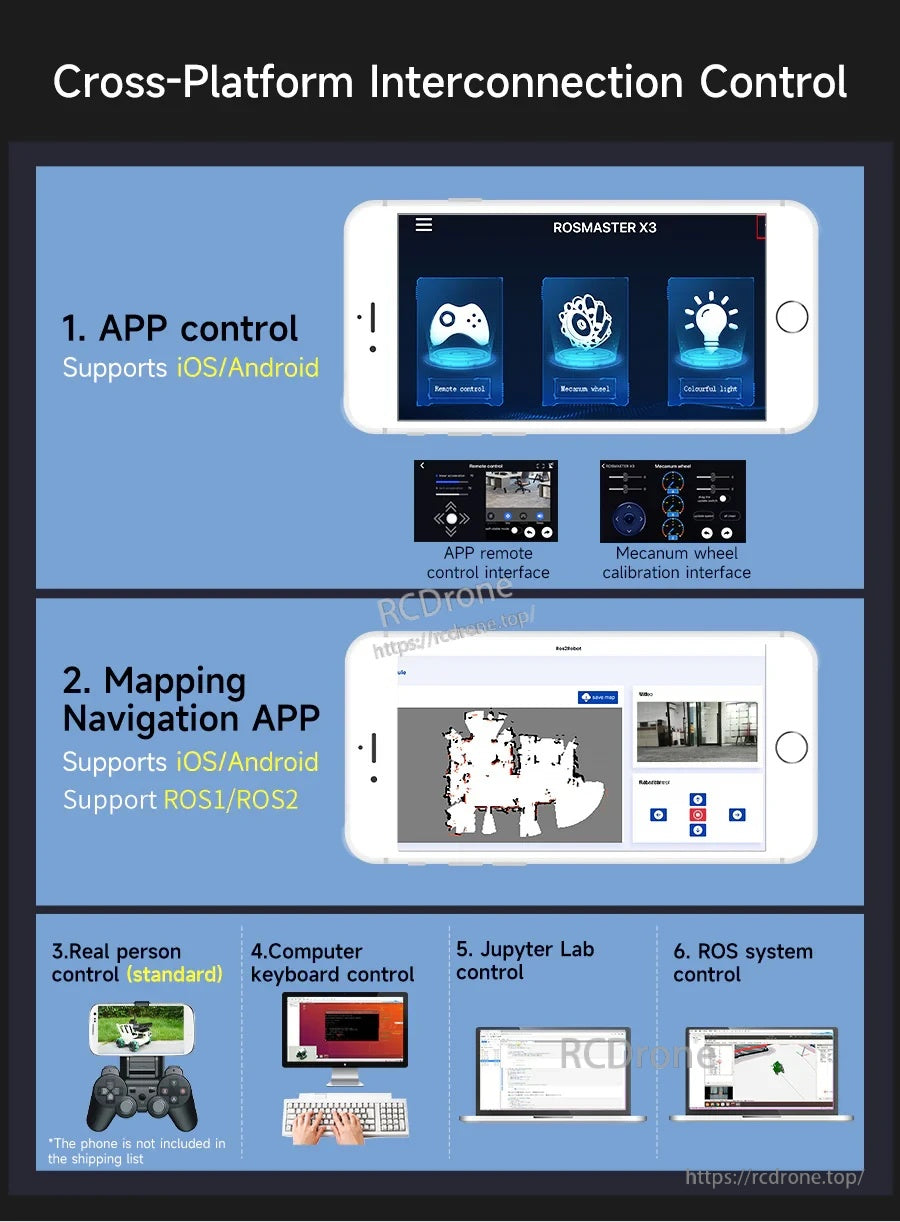
Contrôlez le robot depuis des applications mobiles, un clavier d'ordinateur, JupyterLab ou directement via le système ROS pour des flux de travail flexibles.

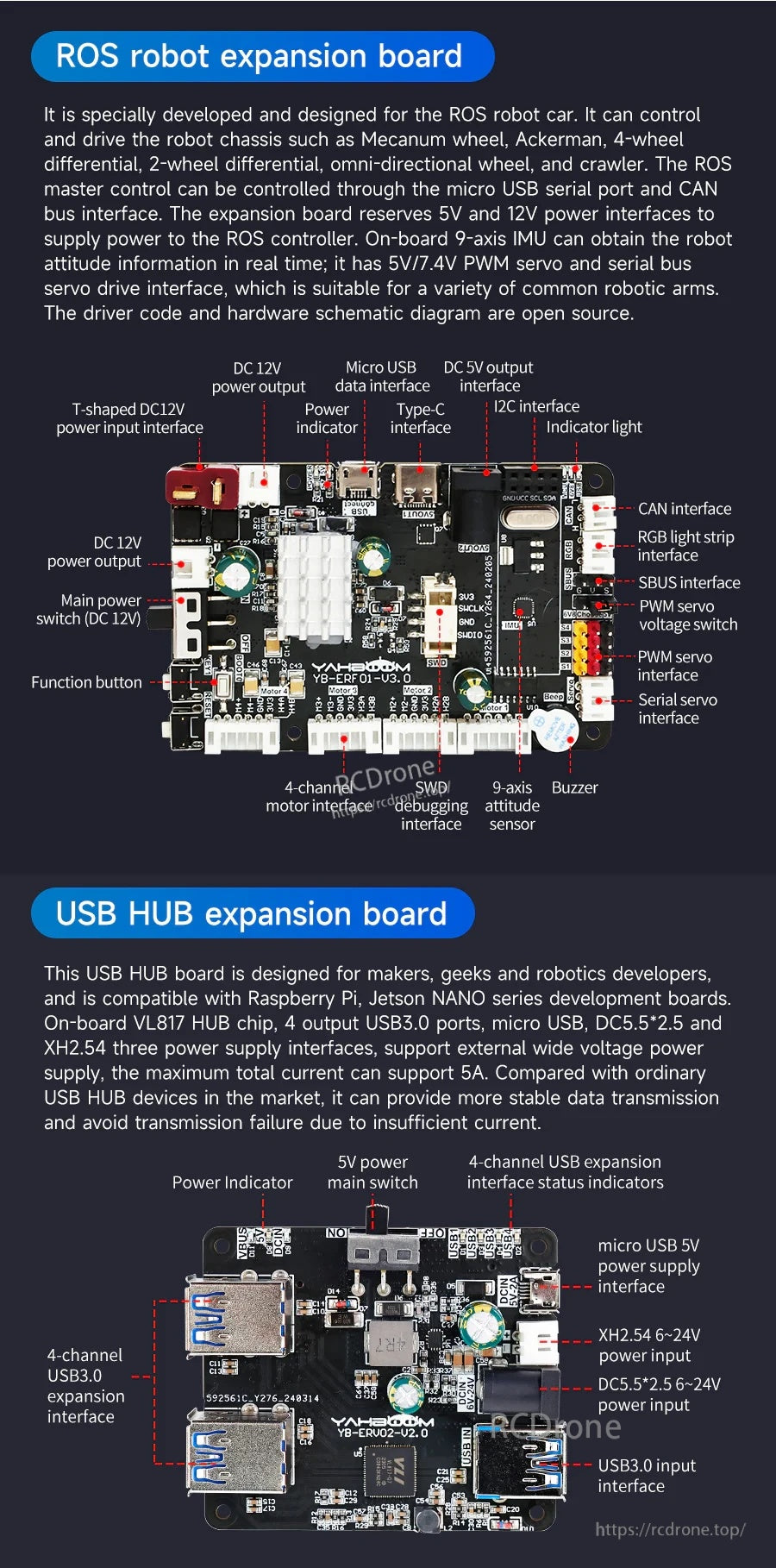
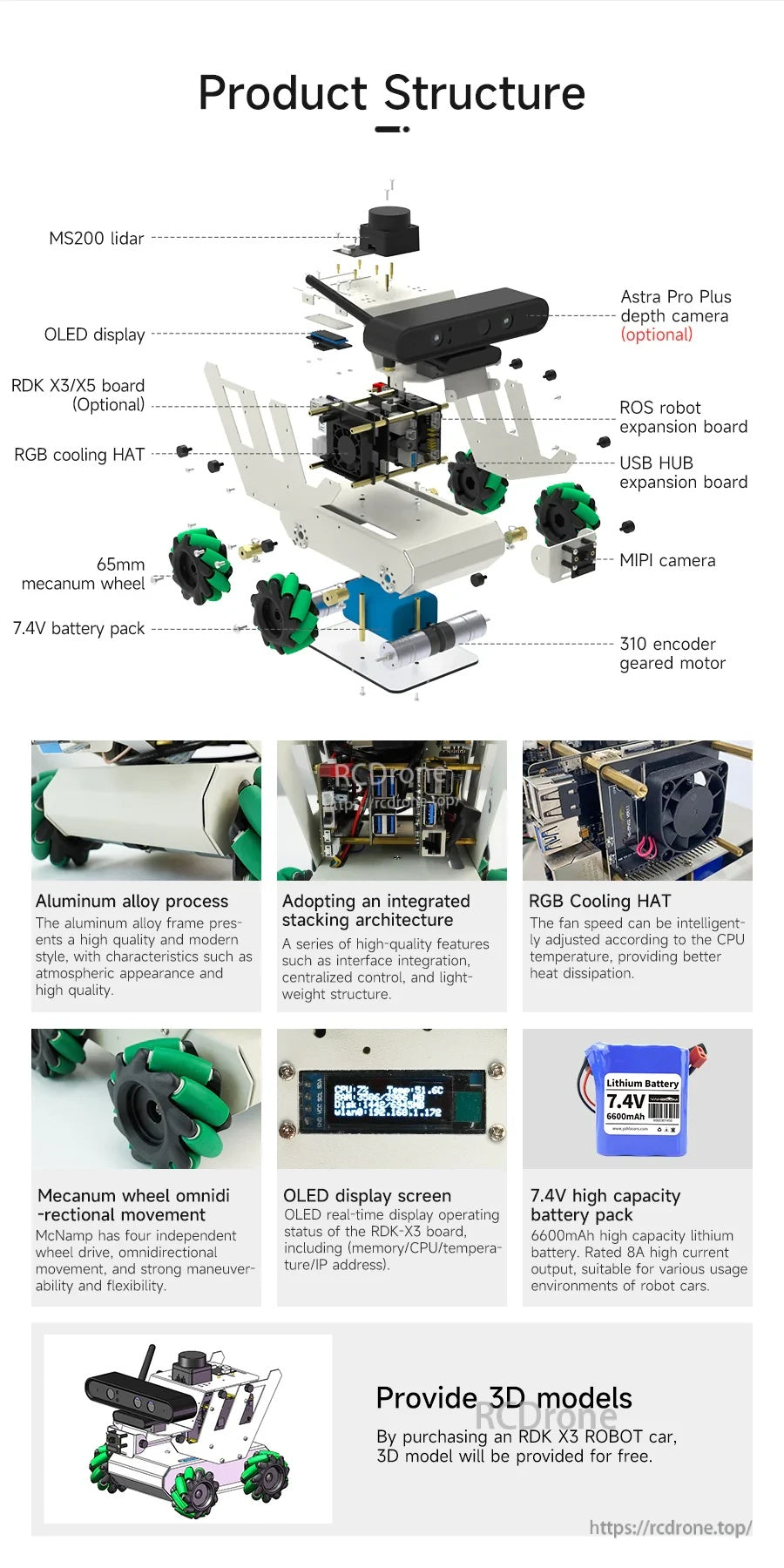
La pile robotique Yahboom RDK ROS2 combine une carte de contrôle RDK, des cartes d'extension ROS, une caméra MIPI, un lidar et une batterie de 7,4V dans un châssis en couches avec des roues mecanum.
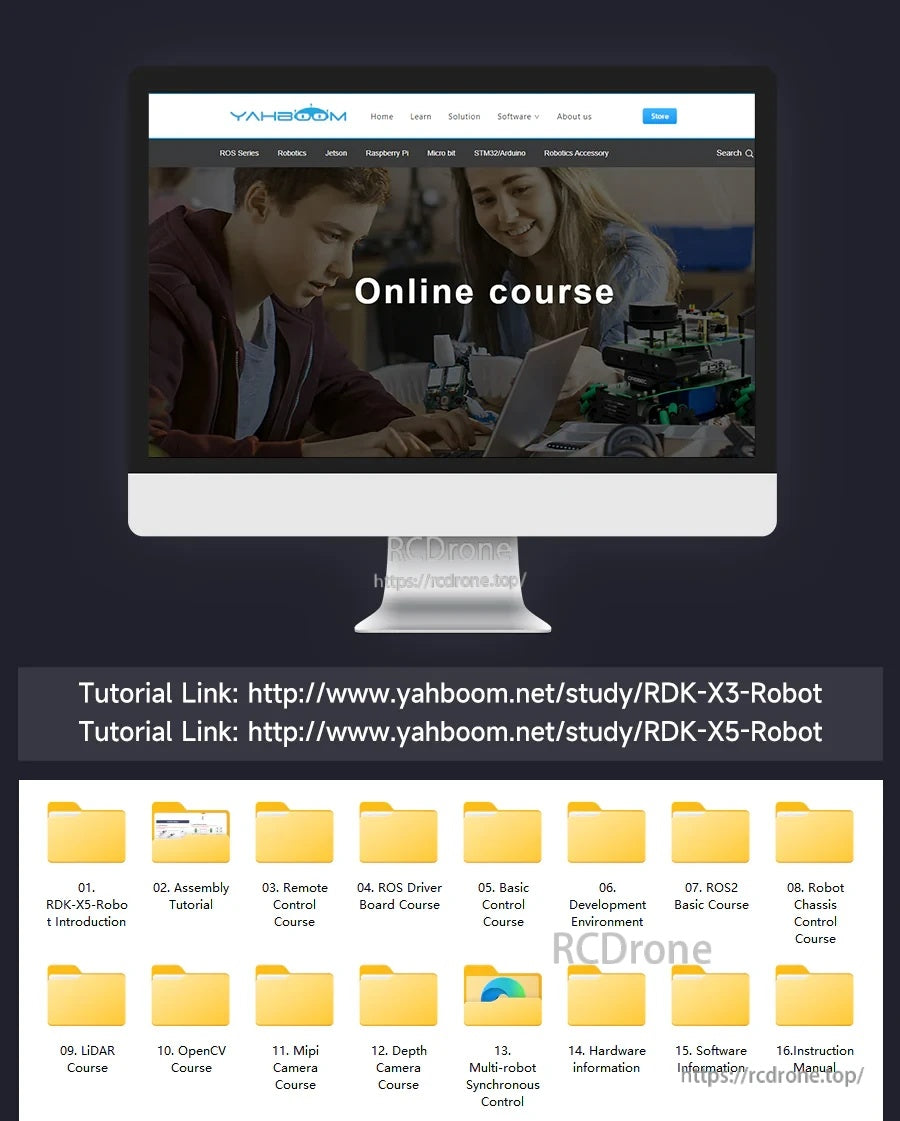
Les tutoriels Yahboom RDK ROS2 Robot sont organisés avec des dossiers de cours et des liens d'étude directs pour la configuration et le développement des RDK-X3 et RDK-X5.
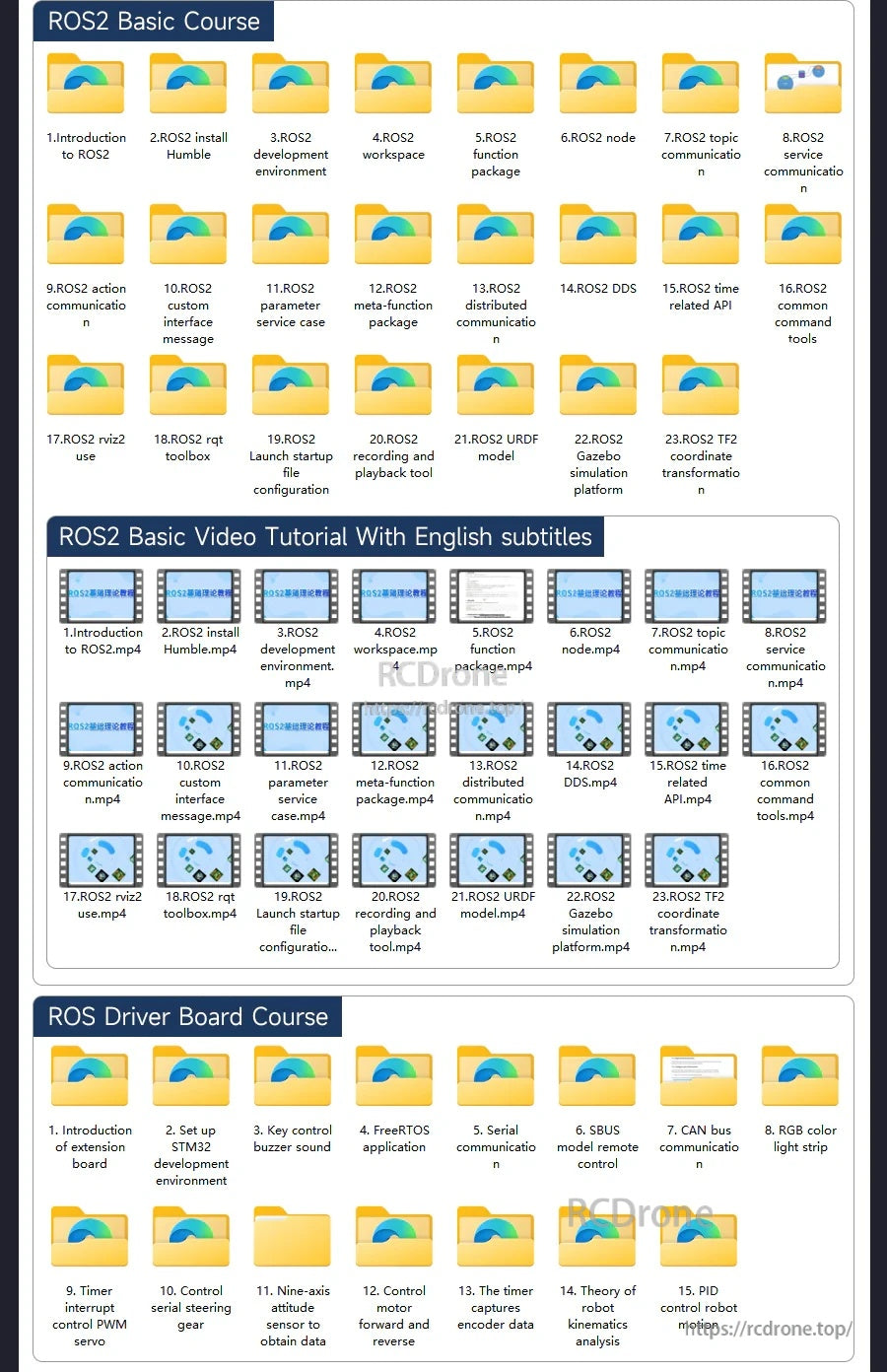
Les supports d'apprentissage Yahboom RDK ROS2 incluent un cours de base ROS2 et des tutoriels vidéo sous-titrés en anglais, ainsi qu'un cours sur la carte de commande avec des modules étape par étape.
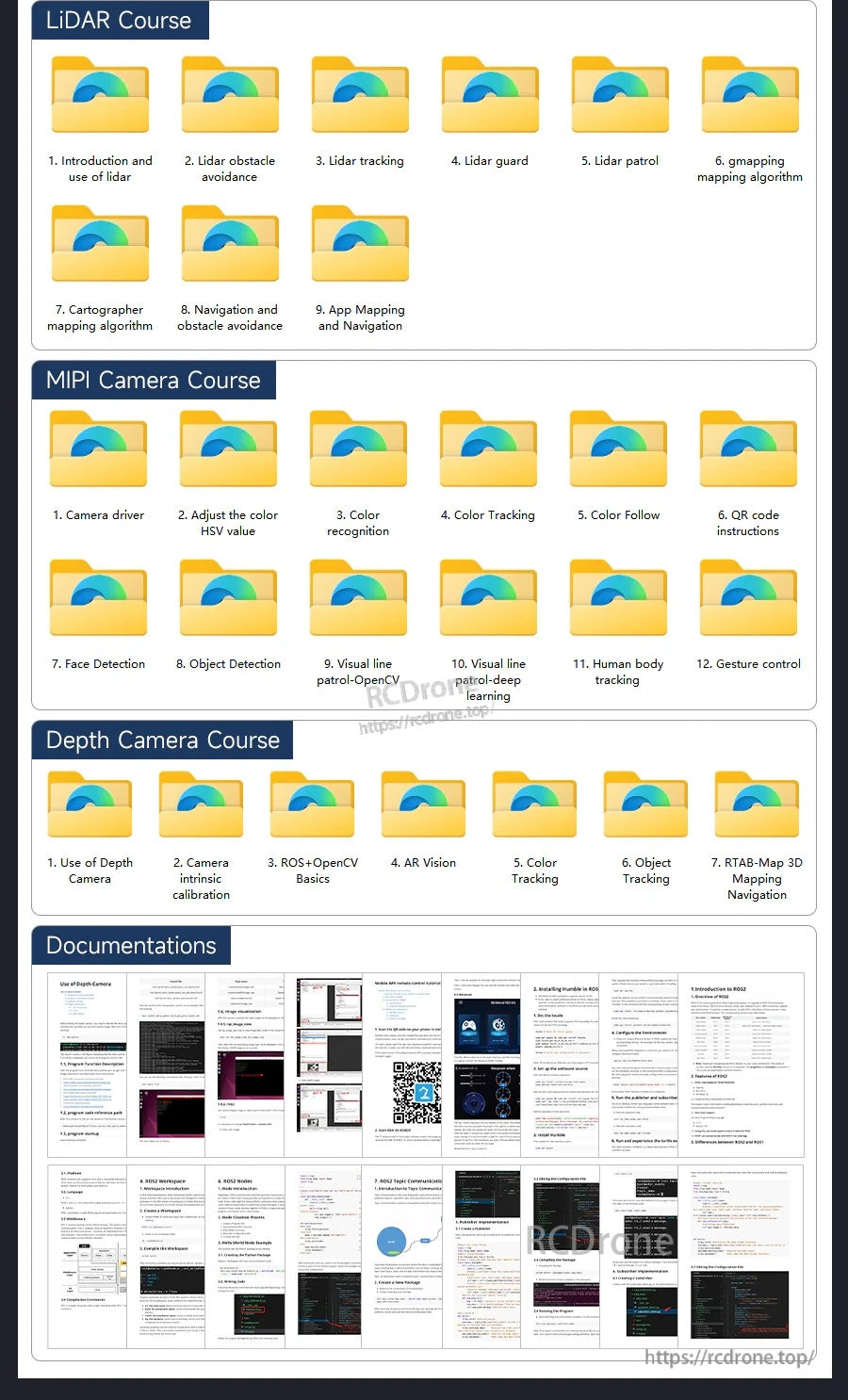
Le pack de cours Yahboom RDK ROS2 Robot couvre la cartographie et la navigation LiDAR ainsi que le suivi, la reconnaissance et les bases de ROS/OpenCV avec caméra MIPI et de profondeur, avec documentation de support incluse.
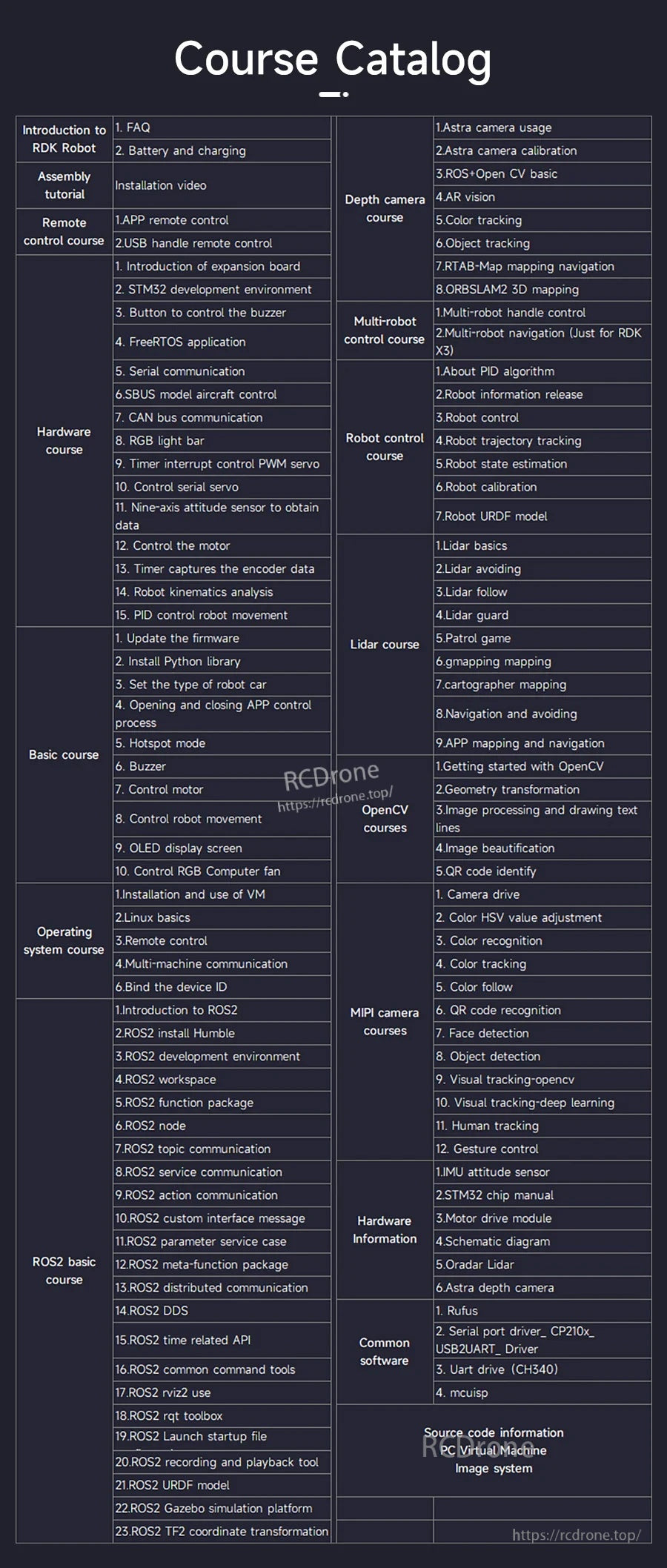
Le catalogue de cours Yahboom RDK ROS2 Robot couvre la configuration, les fondamentaux de ROS2, la cartographie et la navigation, ainsi que les modules de caméra et de vision.

La plateforme robotique Yahboom RDK ROS2 est disponible en plusieurs configurations standard et avancées avec des roues mecanum pour un mouvement omnidirectionnel.
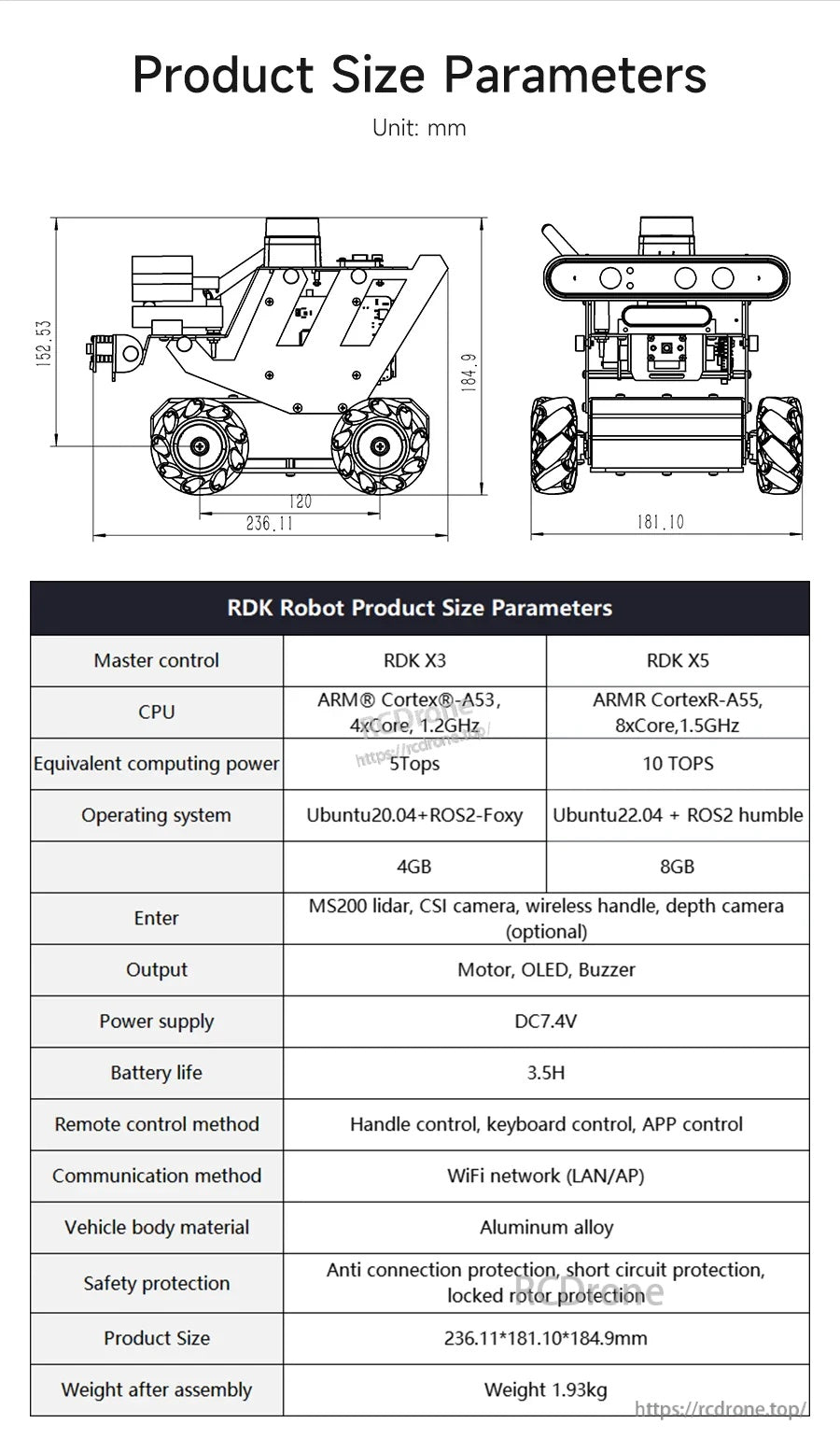
Liste des paramètres du robot Yahboom RDK ROS2 options Ubuntu + ROS2 (Foxy/Humble), 4 Go de RAM, alimentation DC 7.4V, et une empreinte de 236.11 × 181.10 × 184.9 mm.

Le kit robot Yahboom RDK X3 ROS2 comprend un châssis à roues mecanum avec un module caméra, une carte d'extension, une antenne et des accessoires de câblage pour l'assemblage.
Related Collections











