




ZeroOne X6 Contrôleur de vol AutoPilot FMU v6X, STM32H753, ArduPilot, PX4 pour drone VTOL
ZeroOne X6 Contrôleur de vol AutoPilot FMU v6X, STM32H753, ArduPilot, PX4 pour drone VTOL
ZeroOne
Prix habituel
$519.00 USD
Prix habituel
Prix promotionnel
$519.00 USD
Prix unitaire
par
Taxes incluses.
Frais d'expédition calculés à l'étape de paiement.
Impossible de charger la disponibilité du service de retrait
Aperçu
Le ZeroOne X6 AutoPilot est un contrôleur de vol pour les constructions de drones multirotors et VTOL, conçu autour de la norme matérielle open-source FMU v6X. Il intègre une absorption des chocs intégrée, des capteurs à faible bruit avec un design de compensation de température, et une interface Ethernet de 100 Mbps pour une connectivité étendue.
Caractéristiques clés
- Architecture open-source FMU v6X avec référence de documentation standard de connecteur Pixhawk DS-009.
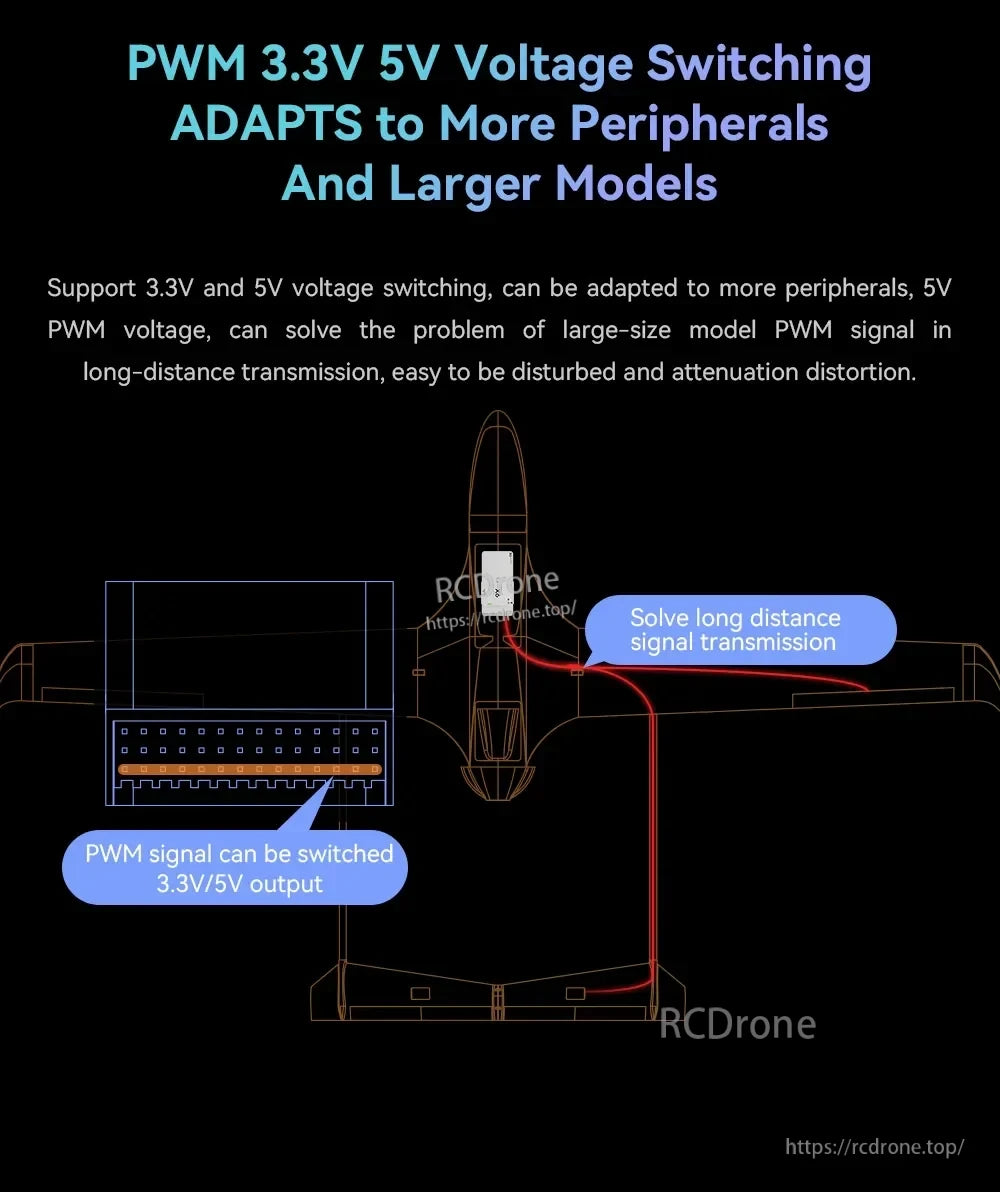
- Commutation de tension PWM 3.3V/5V pour s'adapter à différents périphériques et aider à la transmission de signaux PWM sur de longues distances.
- Conception de protection complète : protection contre les surintensités/survoltages, protection par limitation de courant du récepteur, protection ESD pour les ports, et filtre EMI pour l'alimentation.
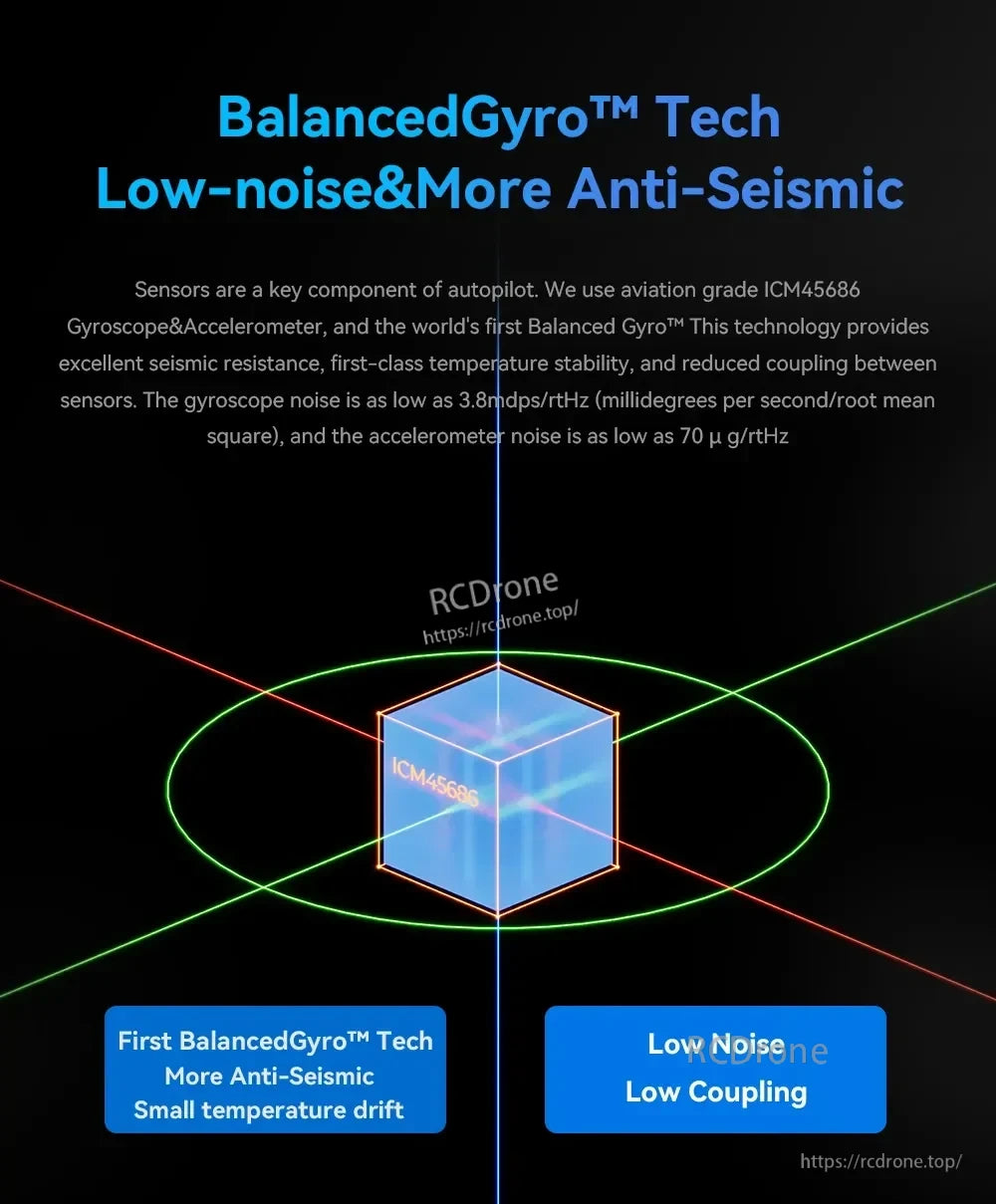
- Technologie BalancedGyro3 (ICM45686) avec un faible bruit déclaré et une réduction du couplage entre les capteurs.
- Support de firmware : ArduPilot (PX4 à venir bientôt).
Pour des questions de support de commande et de compatibilité, contactez le service client à [email protected] or visitez https://rcdrone.top/.
Spécifications
| Article | Spécification |
|---|---|
| Norme matérielle | FMU v6X |
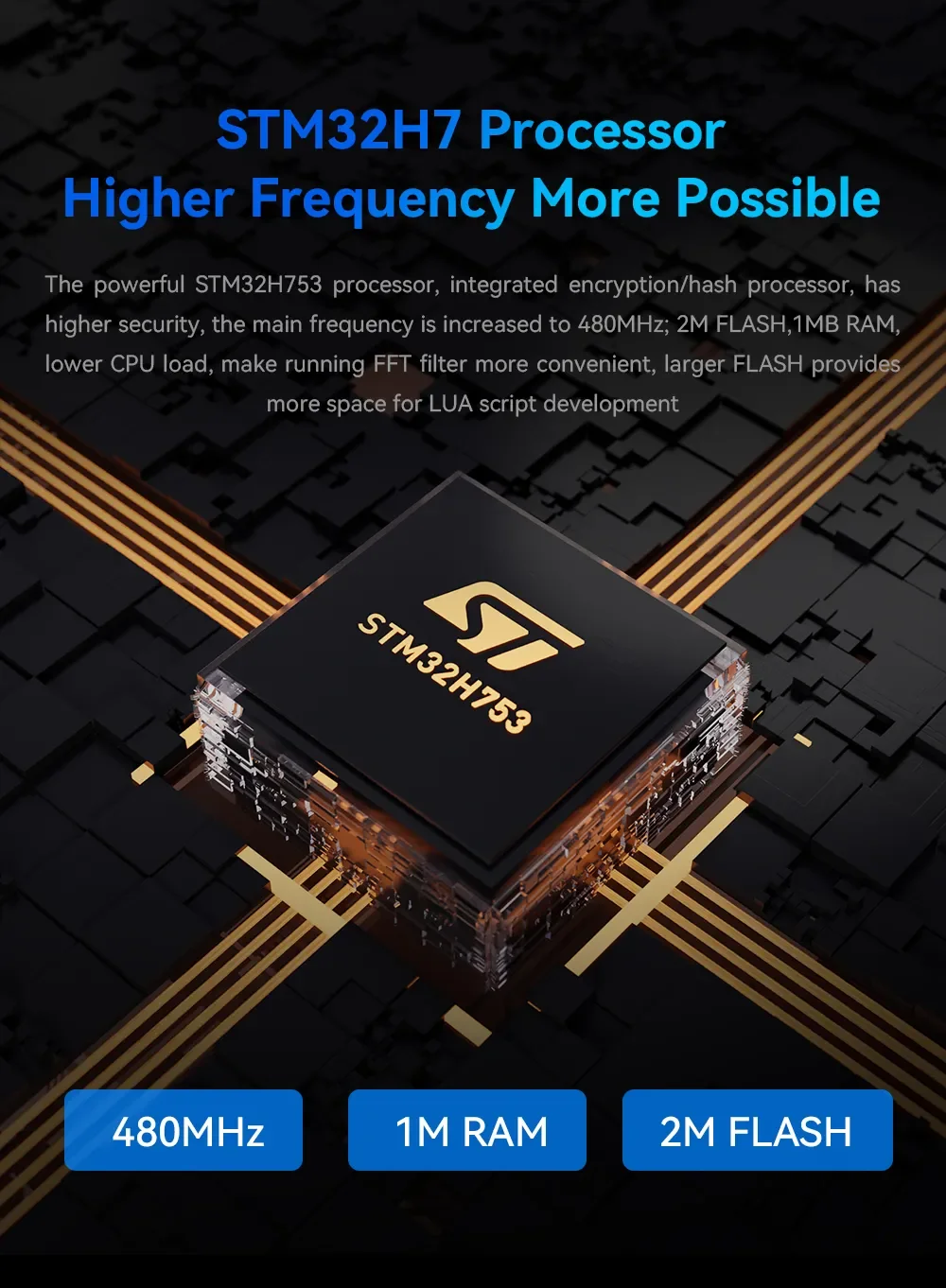
| MCU | STM32H753 |
| IO MCU | STM32F103 |
| Absorption des chocs intégrée | OUI |
| Accéléromètres &et gyroscopes | ICM45686 + ICM45686 + BMI088 |
| Gyro équilibré 3 bruit de gyro déclaré | 3.8 mdps/rtHz |
| Gyro équilibré 3 bruit de l'accéléromètre | 70 ug/rtHz |
| Baromètre | ICP-20100 x2 |
| Boussole | RM3100 |
| Relais PWM | OUI |
| Entrée de protocole RC | SBUS + DSM + PPM |
| Quantité PWM | 16 (14 ports DuPont + 2 ports d'expansion GH1.25) |
| Commutation de tension PWM | La commutation entre 3.3V et 5V est prise en charge |
| Interface d'alimentation | 2 ports d'alimentation DroneCAN |
| Surveillance de la tension du servo | 9.9 V |
| Détails de l'interface | CAN x2; GPS&Sécurité x1; GPS2 x1; DSM PPM IN x1; ETH x1; UART 4 x1; SBUS IN x1; USB x1; SPI x1; AD&IO x1; I2C x1 |
| Température de fonctionnement | -20 C ~ 85 C |
| Poids | 93 g |
| Tension de fonctionnement | 4.5 V à 5.4 V |
| Support du firmware | ArduPilot (PX4 bientôt disponible) |
| Valeurs du dessin mécanique (unité non spécifiée) | 38.8; 17.2; 13 |
Applications
- Assemblages et maintenance de drones multirotors
- Assemblages de drones VTOL nécessitant un contrôleur de vol FMU v6X
- Remplacement d'un module de contrôleur de vol ZeroOne X6
Détails




Related Collections




