






ZeroOne X6 Pro Contrôleur de vol Autopilot FMU v6X STM32H753, Triple IMU, Ethernet 100M, PWM 3,3V/5V
ZeroOne X6 Pro Contrôleur de vol Autopilot FMU v6X STM32H753, Triple IMU, Ethernet 100M, PWM 3,3V/5V
ZeroOne
Impossible de charger la disponibilité du service de retrait
Aperçu
Le ZeroOne X6 Pro est un contrôleur de vol autopiloté basé sur l'architecture open-source FMU v6X (Standard de connecteur Pixhawk DS-009), conçu pour des environnements à forte vibration et prenant en charge les firmwares ArduPilot et PX4. Il intègre des capteurs de qualité industrielle, une absorption des chocs intégrée, une redondance triple IMU, une compensation de température IMU et une interface Ethernet de 100 Mbit pour une connectivité étendue.
Caractéristiques clés
- Norme matérielle open-source FMU v6X (compatibilité avec la norme de connecteur Pixhawk DS-009 indiquée)
- Processeur: STM32H753; processeur de cryptage/hash intégré (comme indiqué); fréquence principale augmentée à 480MHz; 2M FLASH; 1M RAM
- Capteurs de qualité industrielle avec haute résistance aux vibrations, faible bruit et faible dérive de température (comme indiqué)
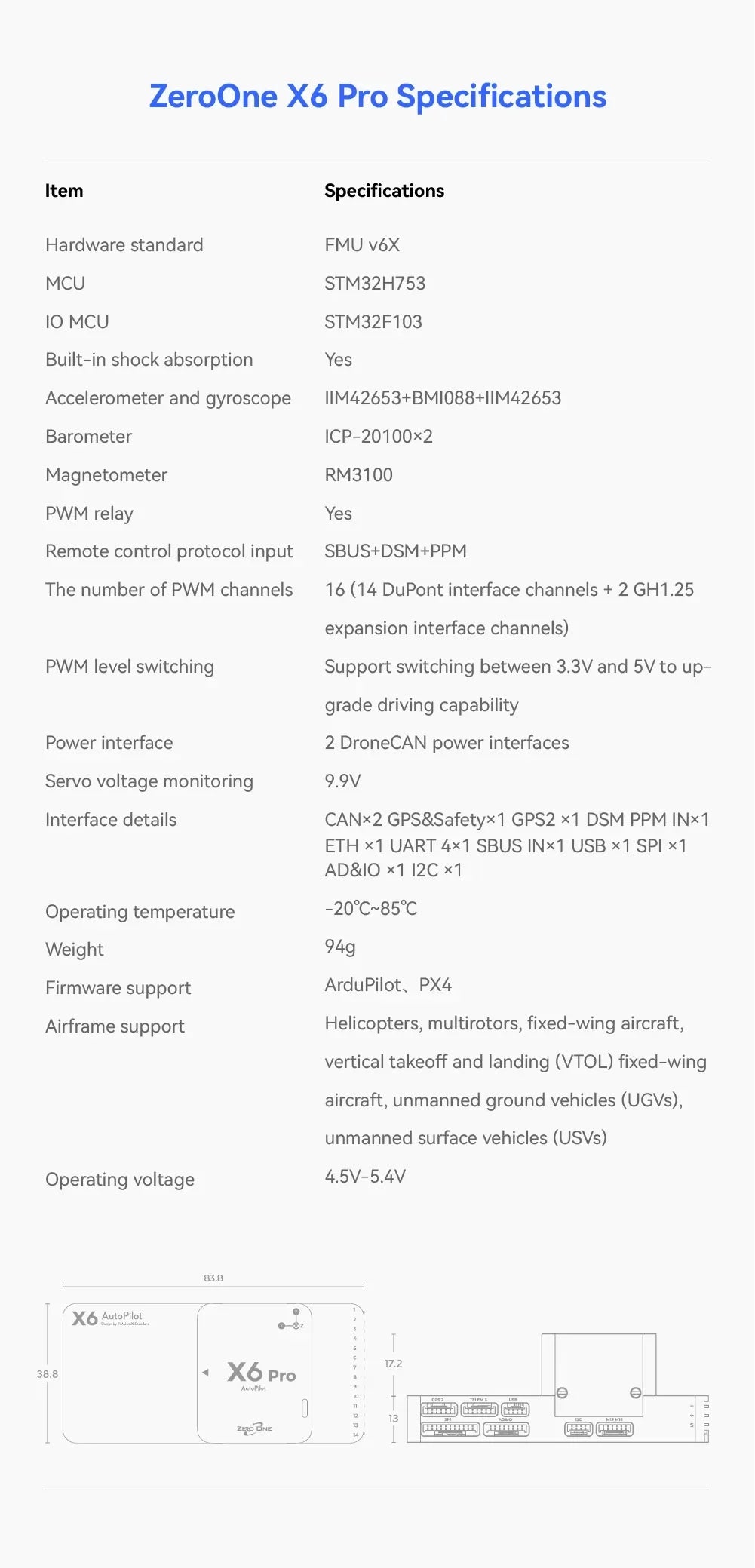
- Redondance IMU triple et architecture de redondance multi-capteurs (comme indiqué)
- Compensation de température IMU (puissance de chauffage augmentée de 100%, comme indiqué)
- Capacité de conduite PWM avec 3.3V/5V support de commutation de niveau/tension PWM
- Fonctionnalités de protection : protection contre les surintensités/surtensions ; protection par limitation de courant du récepteur ; protection ESD pour les ports ; filtre EMI d'alimentation
- Interface Ethernet 100 Mbit (ETH x1) pour connecter des périphériques/ordinateurs externes (les plateformes d'exemple incluent Raspberry Pi et le kit de développement Nvidia Jetson série)
- Support DroneCAN via interfaces d'alimentation (2 interfaces d'alimentation DroneCAN répertoriées)
Spécifications
| Norme matérielle | FMU v6X |
| MCU | STM32H753 |
| IO MCU | STM32F103 |
| Fréquence du CPU (comme indiqué) | 480MHz |
| Mémoire (comme indiqué) | 1M RAM |
| Flash (comme indiqué) | 2M FLASH | Absorption des chocs intégrée | Oui |
| Accéléromètre et gyroscope (fiche technique) | IIM42653 + BMI088 + IIM42653 |
| Gyroscope mentionné dans les matériaux | ICM45686 (mentionné dans le texte des fonctionnalités); IIM42653 (référencé dans la note de code ArduPilot et la fiche technique) |
| Baromètre | ICP-20100 x2 |
| Magnétomètre | RM3100 |
| Relais PWM | Oui |
| Entrée de protocole de télécommande | SBUS + DSM + PPM |
| Nombre de canaux PWM | 16 (14 canaux d'interface DuPont + 2 GH1.25 canaux d'interface d'expansion) |
| Commutation de niveau PWM | Support de la commutation entre 3.3V et 5V pour améliorer la capacité de conduite |
| Interface d'alimentation | 2 interfaces d'alimentation DroneCAN |
| Surveillance de la tension du servo | 9.9V |
| Détails de l'interface | CAN x2; GPS&Sécurité x1; GPS2 x1; DSM PPM IN x1; ETH x1; UART 4 x1; SBUS IN x1; USB x1; SPI x1; AD&IO x1; I2C x1 |
| Température de fonctionnement | -20°C~85°C |
| Tension de fonctionnement | 4.5V~5.4V |
| Poids | 94g |
| Support de firmware | ArduPilot, PX4 |
| Support de structure aérienne | Hélicoptères ; multirotors ; avions à voilure fixe ; avions à décollage et atterrissage verticaux (VTOL) à voilure fixe ; véhicules terrestres sans pilote (UGVs) ; véhicules de surface sans pilote (USVs) |
| Dimensions extérieures (comme indiqué) | 83,8 mm ; 38,8 mm ; 17,2 mm ; 13 mm |
Capteurs de qualité industrielle (valeurs du tableau affichées)
| Gyroscope | ||
| Plage (°/s) (plus c'est grand, mieux c'est) | Capteur X6 Pro : 4000 | ADIS16470 : 2000 ; ICM20649 : 4000 ; ICM20689 : 2000 |
| Bruitage RMS (°/s/sqrt(Hz)) (moins c'est, mieux c'est) | Capteur X6 Pro : 0,005 | ADIS16470 : 0,008 ; ICM20649 : 0,0175 ; ICM20689 : 0.006 |
| Sensibilité croisée (%) (plus c'est grand, mieux c'est) | Capteur X6 Pro : 1.25 | ADIS16470 : 0.1 ; ICM20649 : 2 ; ICM20689 : 2 |
| Dérive de température de sensibilité (°/s/°C) (plus c'est petit, mieux c'est) | Capteur X6 Pro : 0.005 | ADIS16470 : 0.25 ; ICM20649 : 2 ; ICM20689 : 1.5 |
| Accéléromètre | ||
| Plage (g) (plus c'est grand, mieux c'est) | Capteur X6 Pro : 32 | ADIS16470 : 40 ; ICM20649 : 30 ; ICM20689 : 16 |
| Bruitage RMS (mg) (plus c'est bas, mieux c'est) | Capteur X6 Pro : 0.7 | ADIS16470 : 2.3 ; ICM20649 : 2.85 ; ICM20689 : 1.5 |
| Sensibilité croisée (%) (plus c'est bas, mieux c'est) | Capteur X6 Pro : 1 | ADIS16470 : 0.1 ; ICM20649 : 2 ; ICM20689 : 2 |
| Dérive de température de sensibilité (%/°C) (plus c'est petit, mieux c'est) | Capteur X6 Pro : 0.005 | ADIS16470 : 0,002 ; ICM20649 : 0,026 ; ICM20689 : 1 |
Applications
- Hélicoptères
- Multi-coptère
- Aéronefs à voilure fixe
- Aéronefs à voilure fixe VTOL
- UGV
- USV
Manuels
Service client : [email protected] (ou visitez https://rcdrone.top/).
Détails
Le contrôleur de vol ZeroOne X6 Pro dispose de capteurs de qualité industrielle, d'une haute précision, d'un faible bruit et d'une forte capacité de pilotage PWM. Conçu pour des aéronefs à grande charge utile, il utilise une architecture FMU open-source v6X avec compatibilité Pixhawk.
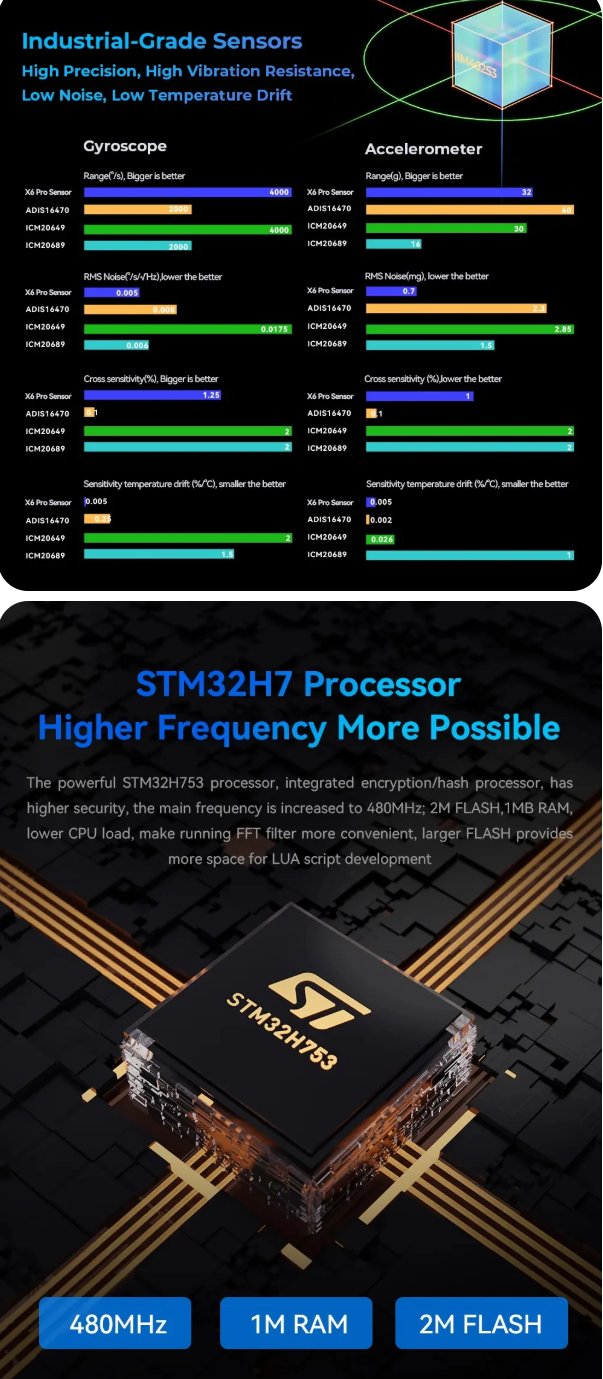
Le ZeroOne X6 Pro utilise des capteurs de qualité industrielle avec une haute précision, un faible bruit et une résistance aux vibrations.Il fonctionne sur un processeur STM32H753 à 480 MHz avec 1 Mo de RAM, 2 Mo de FLASH, une sécurité améliorée, un filtrage FFT et un support de script LUA.
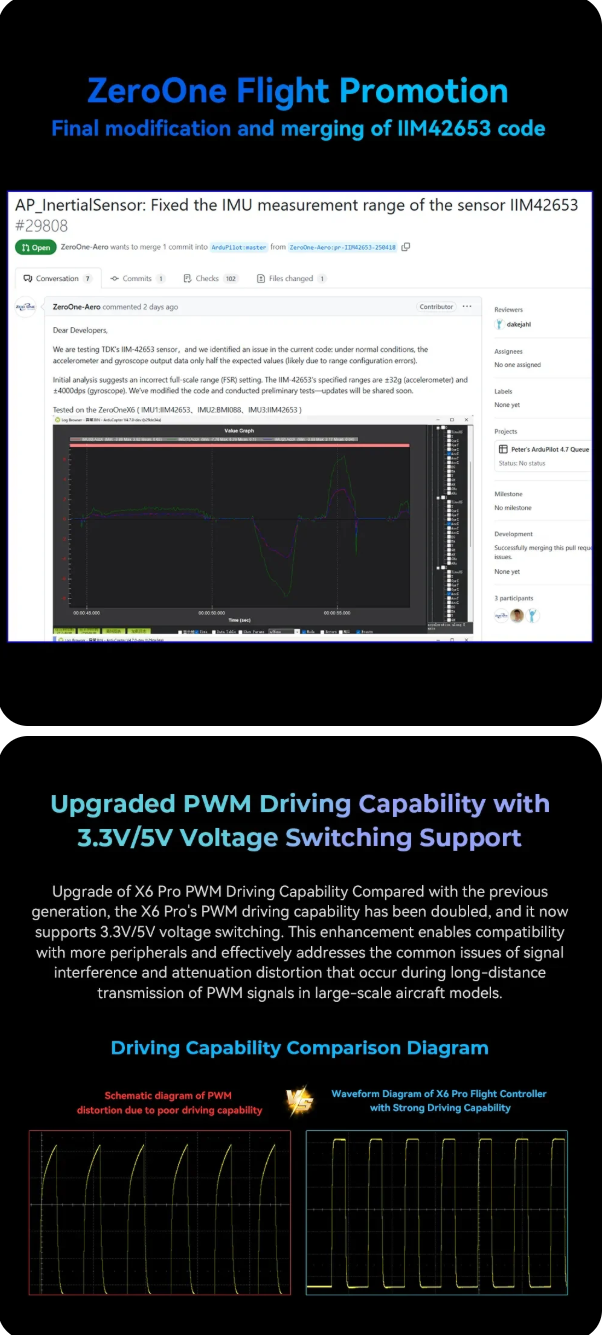
ZeroOne X6 Pro améliore la conduite PWM avec un commutateur 3.3V/5V, doublant la capacité pour réduire la distorsion du signal. La correction de la plage du capteur IMU pour l'IIM42653 garantit des mesures précises, améliorant la stabilité de vol et la compatibilité des périphériques.
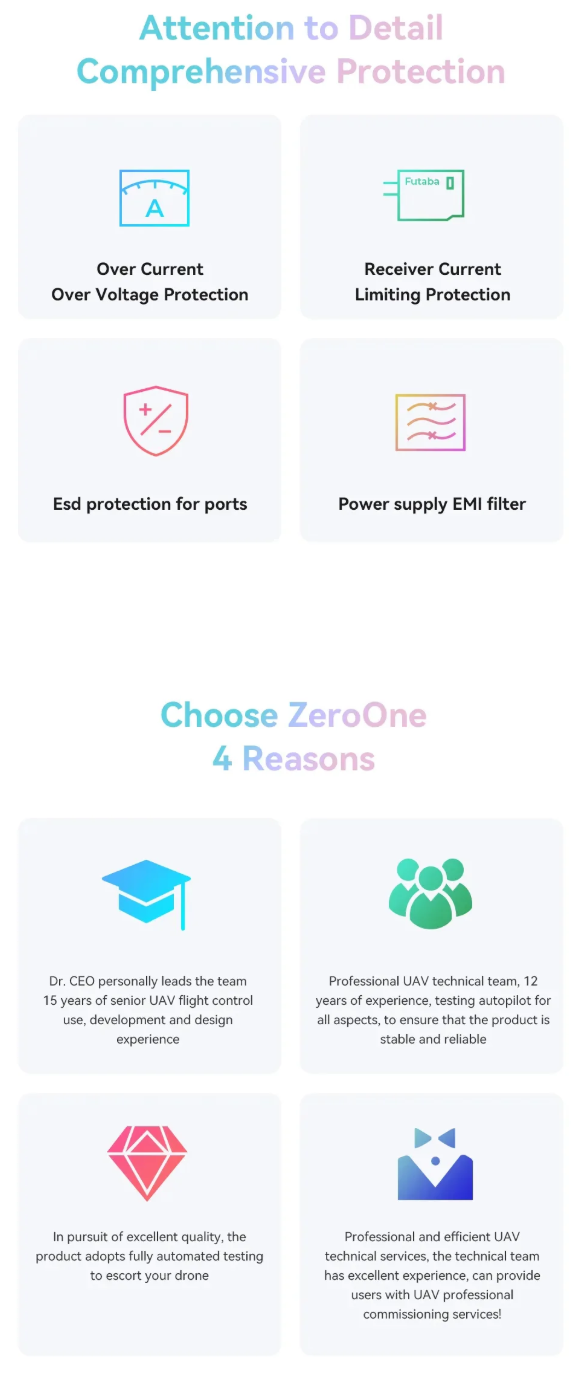
ZeroOne X6 Pro offre une protection complète : surintensité, surtension, filtrage ESD et EMI. Fort de plus de 15 ans d'expertise en UAV, l'équipe professionnelle garantit la fiabilité, les tests automatisés et un support technique efficace pour des performances optimales du drone.

ZeroOne X6 Pro dispose d'une éponge absorbant les chocs pour la stabilité, réduit les vibrations et le bruit, et comprend une interface Ethernet 100M pour SLAM, le suivi visuel et des fonctions avancées de drone avec intégration Raspberry Pi ou Jetson.
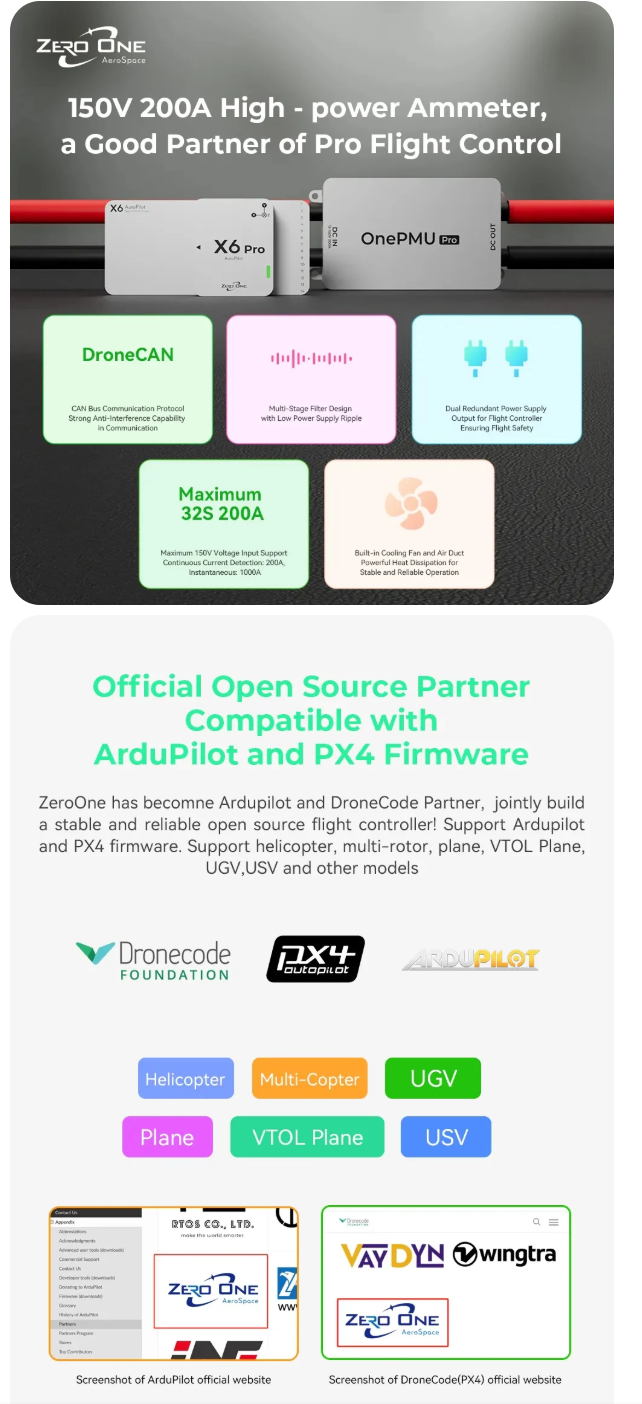
ZeroOne X6 Pro prend en charge 150V 200A, compatible avec ArduPilot et PX4.Fonctionnalités DroneCAN, alimentation double, ventilateur de refroidissement, et convient aux hélicoptères, multi-rotors, avions, modèles VTOL, UGV, USV pour un contrôle de vol professionnel.
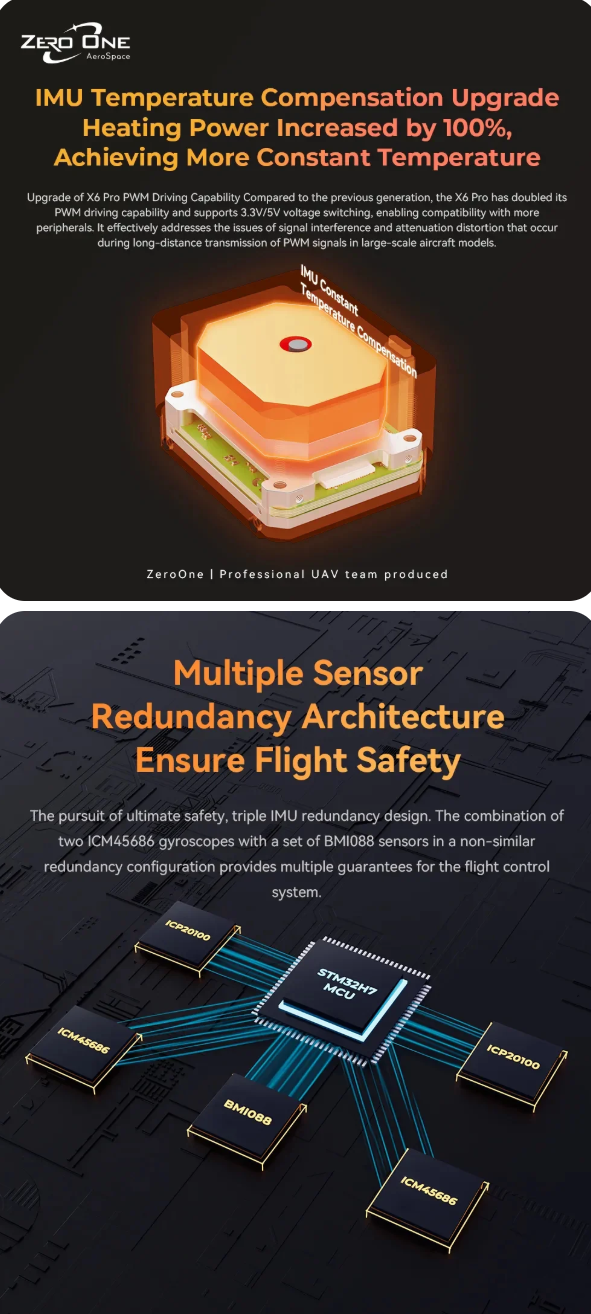
ZeroOne X6 Pro améliore la compensation de température de l'IMU, double la puissance de chauffage et garantit la sécurité de vol grâce à une redondance triple de l'IMU avec des capteurs ICM45686 et BMI088 reliés au MCU STM32H7.
ZeroOne X6 Pro dispose de FMU v6X, MCUs STM32, 16 canaux PWM, alimentation double DroneCAN, surveillance de servo à 9,9V, fonctionnement de -20°C à 85°C, poids de 94g, et prend en charge ArduPilot/PX4 pour hélicoptères, multirotors, VTOL, UGV et USV.
Related Collections






