








Kit di sviluppo drone di assemblaggio CQ230 - Raspberry Pi 4B Pixhawk Ardupilot Kit drone fai da te programmabile open source industriale con rack anticollisione
Kit di sviluppo drone di assemblaggio CQ230 - Raspberry Pi 4B Pixhawk Ardupilot Kit drone fai da te programmabile open source industriale con rack anticollisione
RCDrone
Impossibile caricare la disponibilità di ritiro
Panoramica
Il kit di sviluppo per droni di assemblaggio CQ230 è un kit compatto e open source Drone fai da te piattaforma alimentata da Raspberry Pi 4B E Pixhawk flight controller. Dotato di un passo da 230 mm, telaio anti-collisione e un sistema di alimentazione 4S (16,8 V), questo drone è ideale per imparare e sperimentare con funzionalità programmabili open source. La piattaforma è completamente attrezzata per attività come la navigazione waypoint, il monitoraggio dei dati e lo streaming video in tempo reale, il che lo rende una scelta eccellente sia per sviluppatori che per principianti.
Caratteristiche principali
- Design compatto: Con le sue dimensioni di 360 mm x 360 mm x 300 mm, il drone è ideale per spazi ridotti.
- Rack anticollisione: Il telaio anticollisione interamente in fibra di carbonio garantisce durata e protezione.
- Integrazione Raspberry Pi 4B: Migliorato con Ubuntu 20.04 per un funzionamento e uno sviluppo fluidi.
- Framework open source: Offerto da Ardupilot, supporta Dronekit, MAVLink e ROS.
- Programmabile Compiti: Capace di navigazione autonoma, monitoraggio dei dati in tempo reale ed elaborazione visiva.
- Navigazione waypoint: Imposta percorsi con precisione basata sul GPS.
- Trasmissione dati in tempo reale: Trasferimento dati tramite WiFi alle stazioni terrestri.
- Navigazione visiva: Sistemi a doppia telecamera per una navigazione precisa in spazi chiusi e per evitare gli ostacoli.
- Controlli programmabili: Utilizza Dronekit-Python per creare comandi di volo personalizzati.
- Simulazione del sistema: Combina la simulazione SITL per testare la funzionalità in modo fluido.
Specifiche
| Parametro | Dettagli |
|---|---|
| Modello | CQ230 |
| Passo | 230mm |
| Batteria | 4S (16,8 V) |
| Tempo di volo | 7 minuti |
| Capacità di carico utile | 200g |
| Resistenza al vento | Livello 3-4 |
| Velocità massima | 20 chilometri all'ora |
| Altitudine massima di volo | 120 metri |
| Precisione di posizionamento | 2-3m (GPS) |
| Peso | 612g |
| Gamma di controllo remoto | 700 metri |
Pacchetto
Versione base
- Controllore di volo Pixhawk 2.4.8 ×1
- Sensore di movimento ×1
- Modulo di alimentazione Ledi MINI PIX ×1
- Telemetria WiFi CUAV ×1
- Regolatore di velocità 30A ×4
- 5045 Elica ×4
- Telaio CQ230 ×1
- Caricabatterie bilanciato A400 ×1
- Batteria 4S 2300mAh ×1
- 2205 Motore ×4
- Telecomando FS-i6 ×1
- Cicalino di allarme BB ×1
- Modulo di flusso ottico MF-01 ×1
Versione visiva
- Versione 2.4.Compagnia di volo 8controllore ×1
- M8N GPS ×1
- Modulo di alimentazione Ledi MINI PIX ×1
- Fotocamera CS ×1
- Regolatore di velocità 30A ×4
- 5045 Elica ×4
- Telaio CQ230 ×1
- Cicalino di allarme BB ×1
- Modulo di flusso ottico MF-01 ×1
- Caricabatterie bilanciato A400 ×1
- Batteria 4S 2300mAh ×1
- 2205 Motore ×4
- Telecomando FS-i6 ×1
- Computer di bordo Raspi 4B-4G ×1 Set
- Fotocamera visiva T265 ×1
Applicazioni
- Consegna: Trasporta in modo efficiente oggetti leggeri.
- Sviluppo educativo: Ideale per studenti e ricercatori che desiderano esplorare i sistemi dei droni.
- Elaborazione visiva: Utilizza OpenCV per lo streaming e l'analisi video avanzati.
- Esperimenti di navigazione: Esperimento di volo autonomo basato su GPS e tracciamento della posizione.
Note aggiuntive
- Il sistema include Ubuntu 20.04 per un'interfaccia di programmazione migliorata.
- Il solido ecosistema di Ardupilot garantisce scalabilità e versatilità nelle applicazioni dei droni.
- Un kit didattico completo con tutorial per principianti e professionisti.
Dettagli
Sistema drone open source CQ230

Pixhawk: sistema hardware per droni
Utilizza il controller Pixhawk 2.4.8, dotato del nuovo processore standard a 32 bit STM32F427 e abbinato al barometro 5611. È un controller open source conveniente con ricche opzioni di interfaccia.

ArduPilot: sistema software per droni
Il sistema software del drone, ovvero essenzialmente il firmware di controllo, utilizza il progetto open source ArduPilot, ampiamente diffuso.
(ArduPilot fornisce un sistema software di pilota automatico open source avanzato, completo e affidabile.)
Può controllare tutti i sistemi di droni immaginabili. Per coloro che amano la tecnologia, i droni e l'esplorazione, comprendere ArduPilot vi introdurrà in un mondo affascinante e coinvolgente.

ArduPilot è stato installato in oltre 1.000.000 di sistemi di droni in tutto il mondo. Dotato di strumenti avanzati di registrazione, analisi e simulazione dei dati, è un sistema di pilota automatico completamente testato e affidabile. È anche utilizzato da importanti organizzazioni e aziende come NASA, Intel, Insitu, Boeing e numerosi istituti e università in tutto il mondo per test e sviluppo.

Stazione di controllo a terra del pianificatore di missione
Caratteristiche:
- Strumenti di messa a punto e impostazione dei parametri dei droni;
- Imposta percorsi di volo sulle mappe, consentendo ai droni di seguire automaticamente percorsi preimpostati;
- Selezionare i comandi della missione dai menu a discesa per controllare il drone;
- Scarica e analizza i registri;
- Eseguire simulazioni utilizzando il sistema SITL (Software In The Loop);
- Scoprirai altre funzionalità e le possibilità non finiscono qui...


| Funzionalità predefinite | Versione base | Versione visiva |
|---|
| Disegno lineare | ✓ | ✓ |
| Mantenimento dell'altitudine, Hovering, Stabilizzazione | ✓ | ✓ |
| Ritorno a casa, ritorno sicuro | ✓ | ✓ |
| Atterraggio, atterraggio con batteria scarica | ✓ | ✓ |
| Posizionamento GPS all'aperto e volo di rotta | ✓ | ✓ |
| Controllo programmabile Dronekit-Python | ✓ | ✓ |
| Telemetria WiFi per la trasmissione di dati in tempo reale (raggio di circa 5 m) | ✗ | ✓ |
| Posizionamento del flusso ottico interno, fissaggio dell'altitudine laser | ✓ | ✓ |
| Navigazione con posizionamento visivo doppio per interni, punti di ancoraggio MP, volo di rotta, atterraggio preciso con riconoscimento del codice QR | ✗ | ✓ |
Adatto per il volo indoor
Design compatto con dimensioni di 360 mm × 360 mm × 300 mm, ideale per operazioni in spazi ristretti.

Telaio in fibra di carbonio, robusto e resistente alle cadute

Il design dell'anello anticollisione protegge efficacemente il motore e le pale dell'elica per garantire la sicurezza del volo;

Espandibilità migliorata per lo sviluppo funzionale multi-scenario
Basato sul modello base, il sistema aggiunge Raspberry Pi 4B e ha integrato il sistema Raspberry Pi. Questo sistema include:
- Versione 20.04 di Ubuntu (sistema operativo open source con interfaccia grafica)
- Kit drone Python (una libreria Python per programmare il controllo dei droni utilizzando Dronekit)
- Collegamento Pymav (un'implementazione Python del protocollo MAVLink, che consente il controllo programmabile dei droni tramite Pymavlink)
- ROS (Sistema operativo per robot)
- Mavros (un protocollo di comunicazione per il controllo dei droni tramite ROS)
- Gstreamer (trasmissione streaming video a bassa latenza)
- Router Mavlink (distribuisce i dati del controllore di volo MAVLink a diversi endpoint)
- ApriCV (libreria software open source per l'elaborazione della visione artificiale)

Grazie al sistema sopra descritto, il drone può raggiungere:
- Controllo programmabile dei droni tramite Dronekit-Python
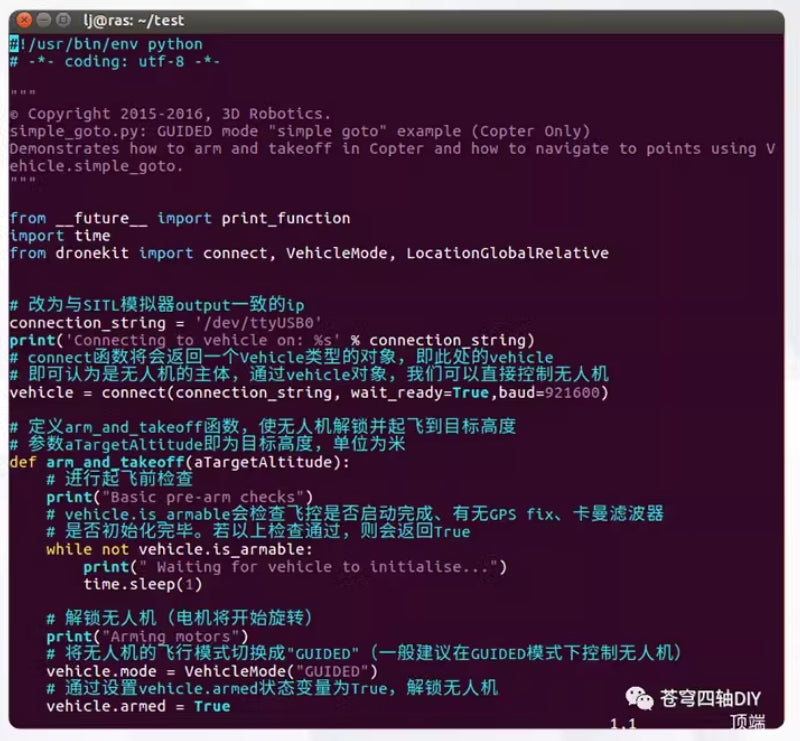
2. Elaborazione visiva del CV APERTO
Aggiunta una telecamera CSI, che consente la trasmissione delle immagini e la post-elaborazione:
- I flussi visivi possono essere catturati utilizzando Raspberry Pi ed elaborati con strumenti come OpenCV.
- I flussi video HD in tempo reale possono anche essere trasmessi a un PC per l'elaborazione o inviati a un dispositivo mobile per la revisione.

3. Trasmissione video HD in tempo reale
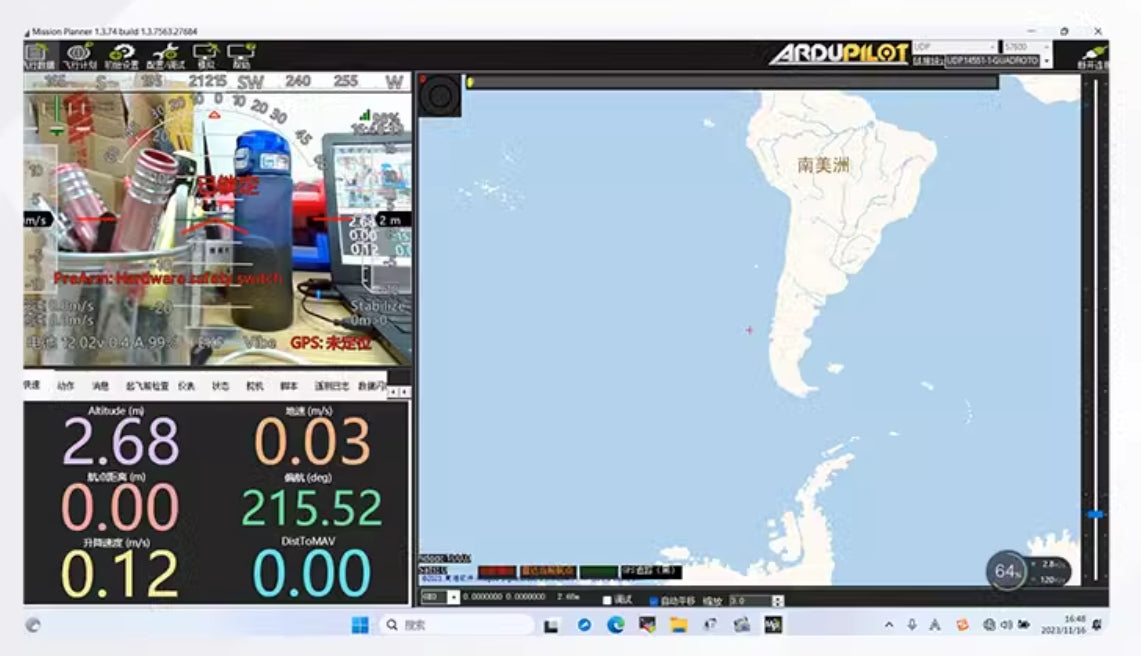
4.Monitoraggio dei dati della stazione di terra
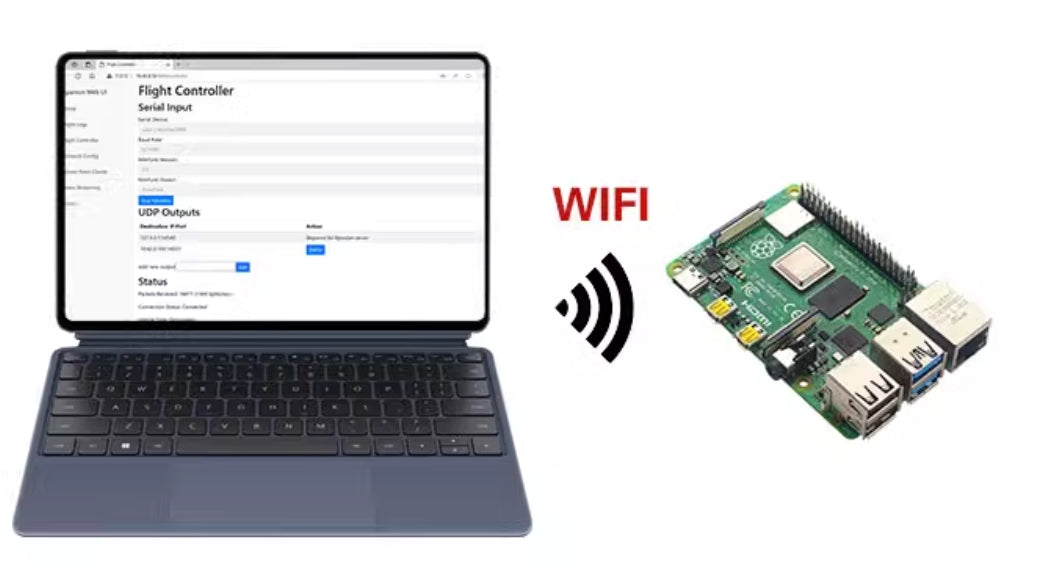
La comunicazione e la trasmissione delle immagini tra la rete WiFi e la stazione di terra del PC (MP) possono essere ottenute senza richiedere moduli di trasmissione aggiuntivi. Dopo che il PC si è connesso all'hotspot WiFi del 4B, la trasmissione di dati e immagini può essere avviata accedendo 10.42.0.10:3000 tramite un browser web.
5. Sviluppo di funzionalità aggiuntive e verifica dell'algoritmo basate sul sistema open source di cui sopra
Versione visuale che supporta i tutorial:
Oltre ai tutorial della versione base, vengono forniti anche tutorial introduttivi sull'elaborazione visiva del Raspberry Pi.
Related Collections









