







Drone di ricerca scientifica Drone P600 - ROS AI Programmazione secondaria sperimentale Piattaforma di sviluppo industriale Studio Lab Drone Kit fai da te
Drone di ricerca scientifica Drone P600 - ROS AI Programmazione secondaria sperimentale Piattaforma di sviluppo industriale Studio Lab Drone Kit fai da te
RCDrone
Impossibile caricare la disponibilità di ritiro
Panoramica
IL Drone per la ricerca scientifica P600 è una piattaforma all'avanguardia progettata per la ricerca scientifica, lo sviluppo industriale e la sperimentazione dell'intelligenza artificiale. Dotata di un'architettura ad alte prestazioni Modulo informatico NVIDIA Jetson Orin NX, consegna Potenza di calcolo 100 TOPS, rendendolo ideale per applicazioni AI avanzate. Questo drone è dotato di un Zoom ottico 40x telecamera cardanica per immagini ad alta risoluzione, Slam LiDAR 3D per una mappatura precisa e Posizionamento RTK per una precisione centimetrica. Il suo software Prometheus V2 integrato E Libreria di visione SpireCV supportare la programmazione secondaria, rendendolo uno strumento versatile per gli sviluppatori. Con un tempo di volo fino a 21 minuti, UN Asse diagonale 600 mm, e un robusto 4,05 kg di peso al decollo, il P600 è ottimizzato per ambienti di ricerca e sviluppo dinamici.
Specifiche
Aereo
| Attributo | Dettagli |
|---|---|
| Tipo di aeromobile | Quadricottero |
| Peso al decollo | Circa 4,05 kg (batteria inclusa) |
| Distanza dell'asse diagonale | 600 millimetri |
| Dimensioni | Lunghezza 469 mm, Larghezza 469 mm, Altezza 400 mm |
| Tempo massimo di hovering | Circa 21 minuti |
| Precisione in hovering | RTK: ±0,015 m (orizzontale), ±0,01 m (verticale) 3D LiDAR SLAM: ±0,2 m (orizzontale), ±0,1 m (verticale) |
| Temperatura di esercizio | Temperatura: da 6°C a 40°C |
| Chip MCU principale | STM32H743VIT6 / 216 MHz / 2M di memoria di programma / 512 KB di memoria di dati |
| IMU | ICM20689 |
| Barometro | BMP388 |
| MTD | AT24C64 |
| Interfacce I/O | PX4IO-V2 integrato, supporta 8Interfacce PWM, 1Interfaccia RC (supporta SBus, PPM, DSM) Interfacce esterne: 3UART (GH1.25 6 pin), 1CAN (GH1.25 4 pin), interfaccia USB per controllo volo (tipo C) |
Computer di bordo
| Attributo | Dettagli |
|---|---|
| Nome | Computer di bordo Allspark-Orin NX |
| Modello | IA160_V1 |
| Peso | Circa 188 g |
| Dimensioni | 102,5 mm × 62,5 mm × 31 mm (inclusa la ventola) |
| Processore | Scheda grafica NVIDIA Jetson Orin NX |
| Memoria | 16 GB LPDDR5 |
| Potenza di calcolo | 100 TOP |
| Scheda grafica | 32 Tensor Core integrati di GPU con architettura NVIDIA Ampere a 1024 core |
| processore | CPU Arm® Cortex®-A78AE v8.2 a 8 core a 64 bit (2 MB L2 + 4 MB L3) |
| Unità SSD | Capacità di archiviazione: 128 GB (M.2 interfaccia, espandibile) |
| Etereo | 100 Mbps x2 (1 porta Ethernet dedicata, 1 intercambiabile) |
| Wifi | 5G |
| Display | Micro HDMI (1920*1080P) |
| Porte USB | USB2.0: Tipo-A x1, Tipo-C x1 USB2.0: OTG x1 |
| Alimentazione elettrica | 10~26V @ 3A |
Batteria di potenza
| Attributo | Dettagli |
|---|---|
| Modello | Modello LPB610HV |
| Capacità | 10000 mAh |
| Peso della batteria | 1,2 kg |
| Tensione di esercizio | 22V~26,1V |
| Tensione di accumulo | 23,1 V |
| Dimensioni | Lunghezza 180 mm, Larghezza 90 mm, Altezza 63 mm |
Controllo remoto
| Attributo | Dettagli |
|---|---|
| Modello | H16 |
| Canali | 16 |
| Frequenza | Frequenza 2.400~2.483 GHz |
| Tensione di esercizio | 4,2V |
| Batteria | 20000 mAh |
| Porta di ricarica | Tipo C 9V-2A |
| Peso | 1034 grammi |
| Dimensioni | Lunghezza 272 mm, Larghezza 183 mm, Altezza 94 mm |
Collegamento di comunicazione
| Attributo | Dettagli |
|---|---|
| Modello | R16 |
| Distanza di comunicazione | Circa 600 metri, larghezza di banda 3,5 Mbps |
| Tensione di esercizio | 7,2 V~72 V |
| Interfacce | 2UART, 1Ethernet, 1Cavo HDMI, 1Tipo C |
| Dimensioni | Lunghezza 76 mm, Larghezza 69 mm, Altezza 11 mm |
Fotocamera Gimbal
| Attributo | Dettagli |
|---|---|
| Modello | Modello GX40 |
| Dimensioni del giunto cardanico | Lunghezza 85,8 mm, Larghezza 86 mm, Altezza 129,3 mm |
| Dimensioni GCU | Lunghezza 45,4 mm, Larghezza 40 mm, Altezza 13,5 mm |
| Peso del giunto cardanico | 405 grammi |
| Peso GCU | 18,6 grammi |
| Tensione di esercizio | 14V~53V |
| Protocollo di streaming | RTSP (predefinito) |
| Formato di codifica | H.264 / H.264H / H.264B / H.265 / MJPEG |
| Risoluzione | - 4K30 fps - 1080P@30fps - 12801024)@30fps <br> - 1.3M (1280960)@30fps - 720P@30fps |
| Velocità in bit | 0,[email protected], 0,[email protected] |
Lente
| Attributo | Dettagli |
|---|---|
| Tipo | Obiettivo zoom ottico |
| Lunghezza focale | 4,8~48 millimetri |
| Apertura (F/NO) | da f1.7 a f3.2 |
| Campo visivo diagonale (D) | 67,2°~7,6° |
| Campo visivo verticale (V) | 36,1°~3,7° |
| Campo visivo orizzontale (H) | 60,2°~6,6° |
| Rapporto di zoom ottico | 10 volte |
Sensore di immagine
| Attributo | Dettagli |
|---|---|
| Tipo di sensore | CMOS |
| Pixel effettivi | 8,29 milioni |
| Dimensioni del sensore | Diametro interno 1/2,8'' |
| Dimensione pixel | 1,45×1,45 (μm) |
| Velocità dell'otturatore elettronico | 1~1/30000s |
Illuminatore
| Attributo | Dettagli |
|---|---|
| Tipo | Laser |
| Lunghezza d'onda | 850±10nm |
| Energia | 0,8 W |
| Distanza di illuminazione | ≤200 metri |
RTK
| Attributo | Dettagli |
|---|---|
| Modello | M15-RTK |
| Peso | 90 grammi |
| Dimensioni | Lunghezza 80 mm, Larghezza 50 mm, Altezza 20 mm |
| Tipi di satellite supportati | BDS/GPS/GLONASS/QZSS |
| Alimentazione elettrica | 9~36V (12V consigliato) |
| Connettore dell'antenna | SMA-F |
| Porte funzionali | Interfaccia UARTx2, CANx1, USB2.0x1 |
Caricabatterie
| Attributo | Dettagli |
|---|---|
| Modello | C1-XR |
| Tensione di ingresso CA | 100~240V |
| Tensione di ingresso CC | 11~18V |
| Dimensioni | Lunghezza 130 mm, Larghezza 115 mm, Altezza 61 mm |
| Peso | 380 grammi |
| Corrente di carica | 0.Da 1 A a 10 A |
| Celle della batteria supportate | 1~6 celle |
Rilevamento LiDAR 3D
| Attributo | Dettagli |
|---|---|
| Modello | MID360 |
| Lunghezza d'onda laser | 905 nm |
| Campo di rilevamento | 40 m (al 105% di riflettività) |
| Campo visivo (FOV) | Orizzontale: 360°, Verticale: -7°~52° |
| Portata minima | 0,1 metri |
| Tasso di nuvola di punti | 10 Hz (tipico) |
| Punti al secondo | 200.000 punti/s |
| Interfaccia dati | Ethernet 100 BASE-TX |
| Sincronizzazione dei dati | IEEE 1588-2008 (PTP v2), GPS |
| IMU interna | ICM40609 |
| Alimentazione elettrica | 7~27V |
| Dimensioni | 65 mm (larghezza) x 65 mm (profondità) x 60 mm (altezza) |
| Peso | 115 grammi |
| Temperatura di esercizio | Temperatura ambiente -20°C ~ 55°C |
Parametri software
Computer di bordo
| Attributo | Dettagli |
|---|---|
| Modello | Il ritorno di Jetson Orin |
| Sistema operativo | Versione 20.04 di Ubuntu |
| Nome utente | amore |
| Password | amore |
| Versione L4T | 35.2.1 |
| Versione Jetpack | 5.1 |
| Versione CUDA | 11.4.315 |
| SDK di RealSense | 2.50.0 |
| Versione ROS | noetico |
| Versione OpenCV | 4.7.0 |
| RealSense ROS | 2.3.2 |
Elenco dei pacchetti
| Nome | Specifiche/Modello | Quantità/Unità |
|---|---|---|
| Aereo principale P600 | P600-Allpark2-RTK-GX40-S3 | 1 set |
| Terminale di terra M15-RTK | M15-RTK | 1 pezzo |
| Antenna GNSS a fungo | Antenna a fungo | 1 pezzo |
| Cavo di estensione dell'antenna GNSS | Cavo di prolunga dell'antenna | 1 cavo |
| Telecomando H16 | H16 | 1 unità |
| Batteria di alimentazione 6S 10000mAh | Batteria 6S da 10000 mAh | 1 set |
| Batteria al litio 3S 4000mAh | 3S 4000mAh | 1 set |
| Caricabatterie intelligente con bilanciamento | C1-XR | 1 unità |
| Cavo di rete | 1,5 metri | 1 cavo |
| Corda di sicurezza | 50 metri | 1 confezione |
| Supporto HDMI | / | 1 pezzo |
| Cavo adattatore HDMI | / | 1 pezzo |
| Configurazione del computer | / | 1 pezzo |
| Piatto di caduta 2D | Dimensioni: 35×35 cm | 1 pezzo |
| Caso di aviazione | Dimensioni: 740×540×510 mm | 1 set |
| Pacchetto cavi accessori | / | 1 confezione |
| Certificato | / | 1 foglio |
| Lista di controllo del test funzionale | / | 1 foglio |
Dettagli
Piattaforma di sviluppo di droni per la ricerca scientifica Prometheus 600
IL Piattaforma di sviluppo di droni per la ricerca scientifica Prometheus 600 (indicato come P600) è il prodotto di quarta generazione della serie P600. Integra profondamente due tecnologie fondamentali, Prometeo E SpiraCV, ed è dotato di una telecamera cardanica con zoom ottico 40x. Questa configurazione consente il rilevamento e il tracciamento di bersagli a lunga distanza, l'atterraggio autonomo da alte quote e missioni di crociera aerea.
Il sistema supporta 3D LiDAR SLAM con Veloce-lio, ottenendo una mappatura 3D SLAM ad alta precisione. Inoltre, presenta la Algoritmo di collaborazione multi-agente EGO-Swarm, consentendo applicazioni in vari scenari, come la ricostruzione spaziale 3D in ambienti interni ed esterni e l'aggiramento degli ostacoli durante la navigazione con i droni.
Queste capacità avanzate sono completate da Stazione di terra professionale Prometheus, che fornisce feedback visivo in tempo reale, monitoraggio delle operazioni e regolazione dinamica dei parametri, facilitando per gli sviluppatori la gestione e l'accelerazione dello sviluppo secondario.

Tre versioni del drone P600

Controllo flessibile del giunto cardanico ottico-elettronico
La telecamera gimbal GX40 supporta il controllo multi-scenario e integra il controllo remoto basato su catena per abilitare la ricerca del target durante la navigazione del waypoint. Utilizzando Libreria di visione SpireCV, facilita il rilevamento e il tracciamento dei bersagli, ottenendo il bloccaggio in tempo reale del gimbal sul bersaglio.
- Illuminazione notturna
- Rilevamento e tracciamento del bersaglio

Target Clic e Monitoraggio
Utilizzando il Algoritmo di rilevamento YOLOv5 e sfruttando il set di dati universale COCO, gli obiettivi vengono rilevati e tracciati. Algoritmo di tracciamento Nanotrack si aggancia ai bersagli selezionati per il tracciamento. Senza cambiamenti nelle condizioni, i bersagli fino a 30 metri di distanza possono essere identificati e tracciati. Attraverso Zoom ottico 40x e zoom elettronico, vengono ottenuti il rilevamento e il tracciamento di bersagli a lunga distanza. Durante il tracciamento dei droni, il Stazione di terra professionale Prometheus consente di impostare il tracciamento dinamico del bersaglio in base alla distanza (l'impostazione predefinita è 10 metri).
- Tracciamento a 30 m
- Tracciamento a 20 m
- Tracciamento a 10 m

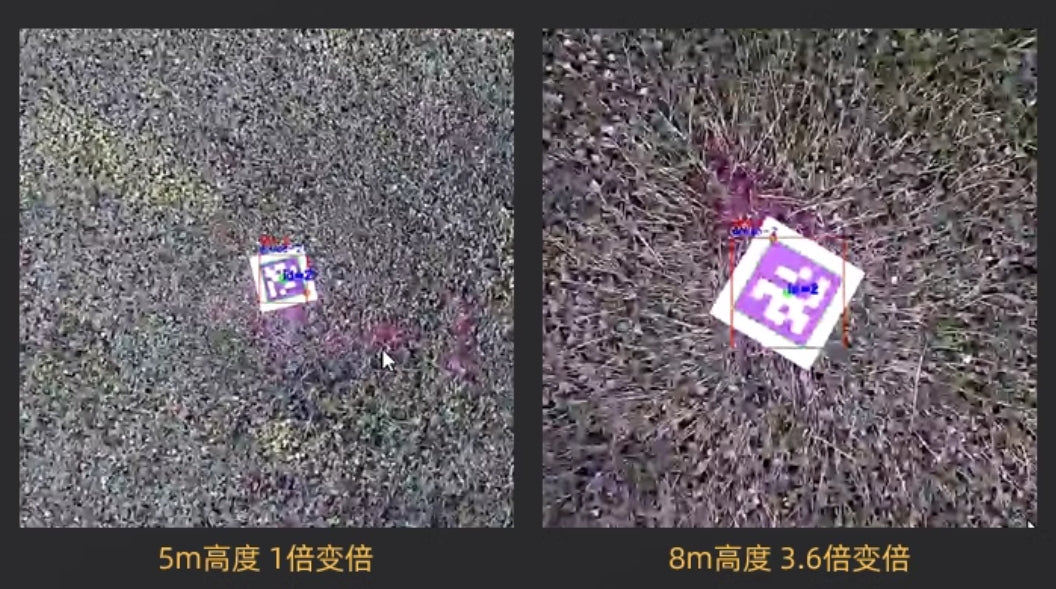
Atterraggio guidato tramite codice QR
Utilizzando il Libreria di visione SpireCV, si ottengono un rilevamento preciso e una stima della posizione dei codici QR. Il GX40 può eseguire atterraggi guidati con precisione sui codici QR da diverse altitudini. Il centro della telecamera gimbal si allinea con il centro del codice QR entro un margine di errore di 30 cm.
- Altitudine 5m, Zoom 1x
- Altitudine 8m, zoom 3,6x
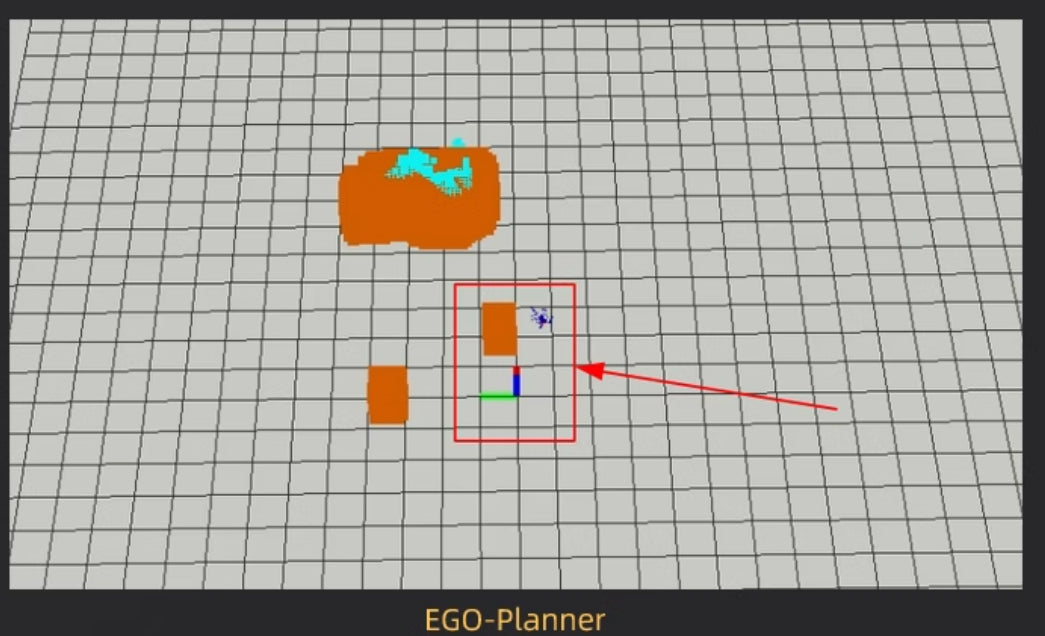
EGO-Planner
Supporta il Algoritmo di pianificazione del percorso EGO-Planner e fornisce Algoritmo di mappatura OctomapIn combinazione con la stazione di terra professionale, consente la pianificazione autonoma del percorso dinamico 3D.
Applicazioni di controllo dei droni stabili e affidabili
Il drone P600 è dotato di equipaggiamento RTK ad alta precisione, che consente di effettuare hovering ad alta accuratezza all'aperto con precisione orizzontale fino a 1 cm e precisione verticale fino a 1,5 cm. In combinazione con Modulo di controllo del sistema software Prometheus, consente un controllo preciso del drone.
Il modulo di controllo del drone funge da "ponte" tra i programmi software e il drone, fornendo molteplici stati di controllo come il volo stazionario in posizione iniziale, il volo stazionario in posizione attuale, l'atterraggio e il movimento. Questi includono sei modalità di controllo: posizione abituale del sistema, velocità, controllo integrato di posizione e velocità e modalità di controllo della traiettoria. In totale, offre sette modalità di controllo.

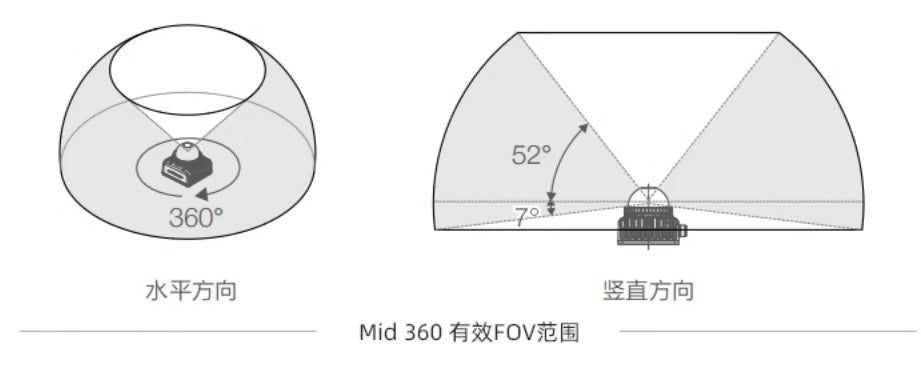
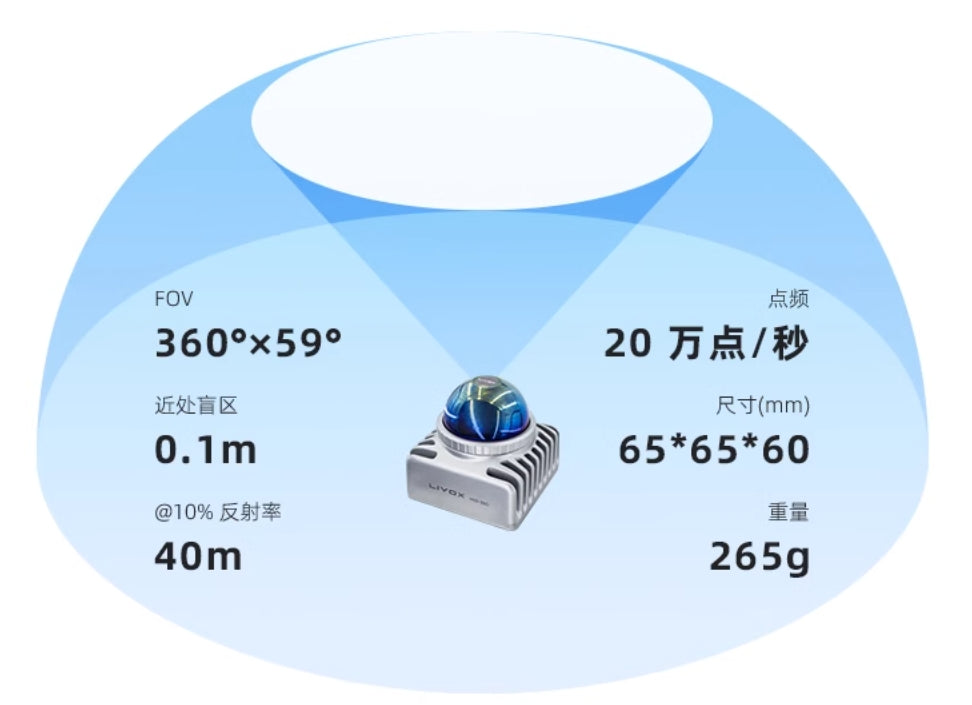
LiDAR 3D a metà 360°
- Bassa zona cieca | Ampio campo visivo | Applicazione multi-scenario
IL Metà 360 presenta un Campo visivo orizzontale a 360° e un campo visivo verticale massimo di 59°Quando la riflettività dell'oggetto target è del 10%, la portata massima di rilevamento può raggiungere 40 metrie la portata della zona cieca è piccola quanto 10 metriSi adatta a vari ambienti complessi come luce scarsa e luce intensa.
Dotato del modulo Mid-360, il Drone P600 consente di ottenere una copertura panoramica della zona cieca, garantendo un funzionamento impeccabile dei droni in ambienti multi-scenario.
- Descrizioni dei diagrammi:
- Direzione orizzontale: 360°
- Direzione verticale: FOV massimo 52°

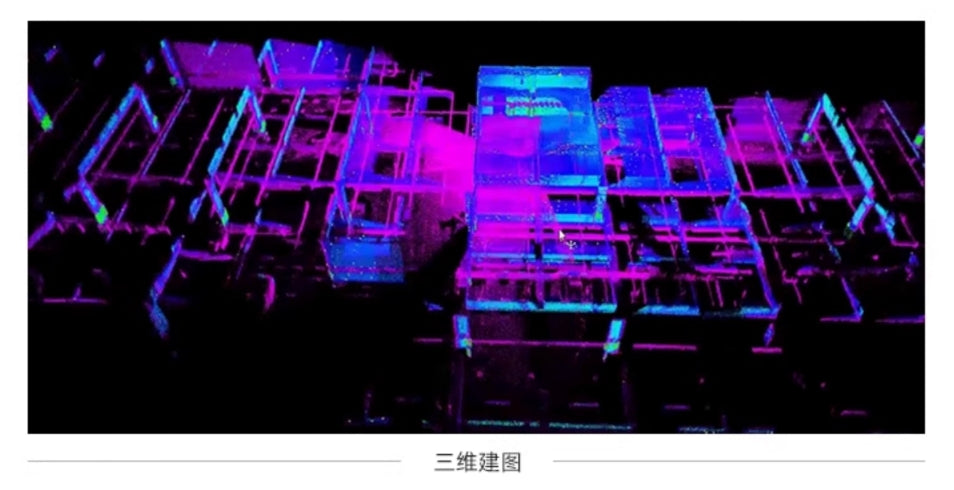
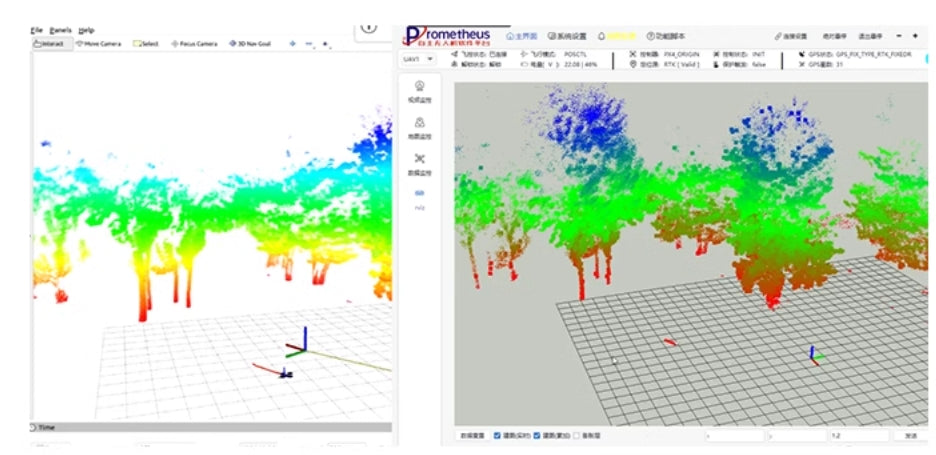
Mappatura ambientale 3D rapida e accurata
IL Drone P600 è dotato di capacità di rilevamento ambientale avanzate, che gli consentono di raccogliere rapidamente dati ambientali circostanti durante il volo. Questi dati vengono elaborati in tempo reale per generare un Mappa ambientale 3D, fornendo una precisa consapevolezza spaziale e supporto alla navigazione per varie attività.
Pianificazione del percorso EGO-Swarm per la navigazione e l'evitamento degli ostacoli
IL Metà360 pubblica dati di nuvole di punti e dati sulla posizione, combinati con Algoritmo di pianificazione del percorso EGO-Swarm, migliorando significativamente la capacità del drone di adattarsi autonomamente ai cambiamenti ambientali dinamici. Può analizzare e rispondere in tempo reale agli ostacoli durante il movimento e regolare dinamicamente il bersaglio di tracciamento con una velocità massima di 2 metri al secondoCiò garantisce flessibilità e adattabilità eccezionali in scenari operativi sconosciuti e complessi.
Questa caratteristica migliora notevolmente l'efficienza delle attività del drone, consentendogli di completare in modo efficiente e accurato una varietà di attività
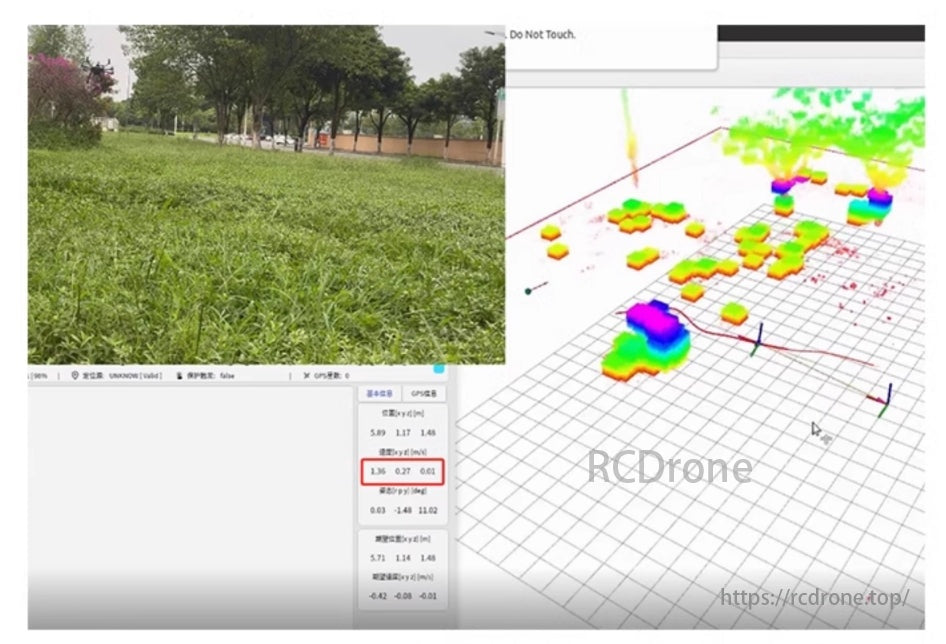
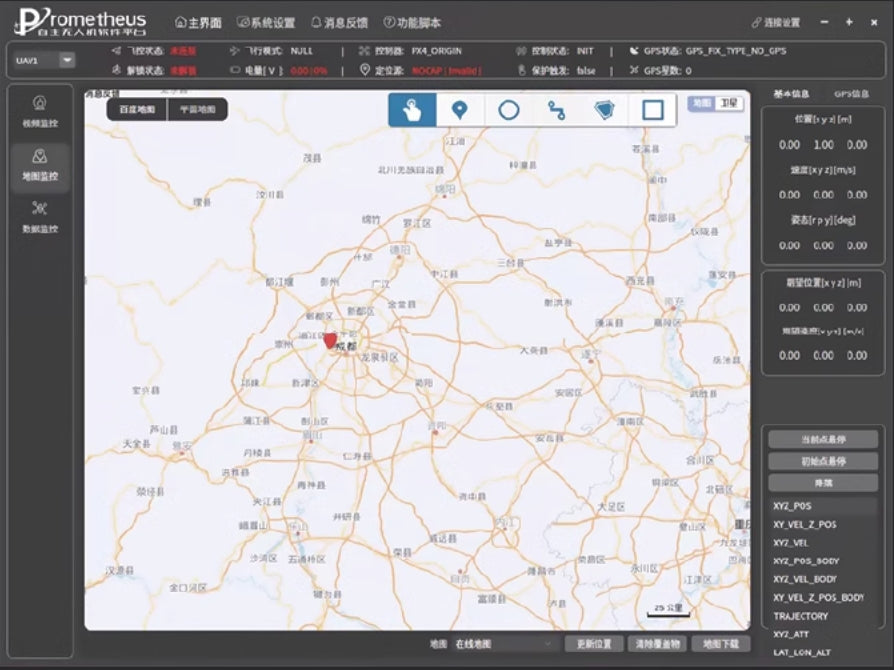
Interazione con i droni della stazione di terra professionale Prometheus
- Interazione con la stazione di terra
Questo mette in mostra l'interfaccia e le capacità di interazione del Stazione di terra professionale Prometheus, consentendo una comunicazione e un funzionamento senza interruzioni con il drone tramite la mappatura ambientale 3D.
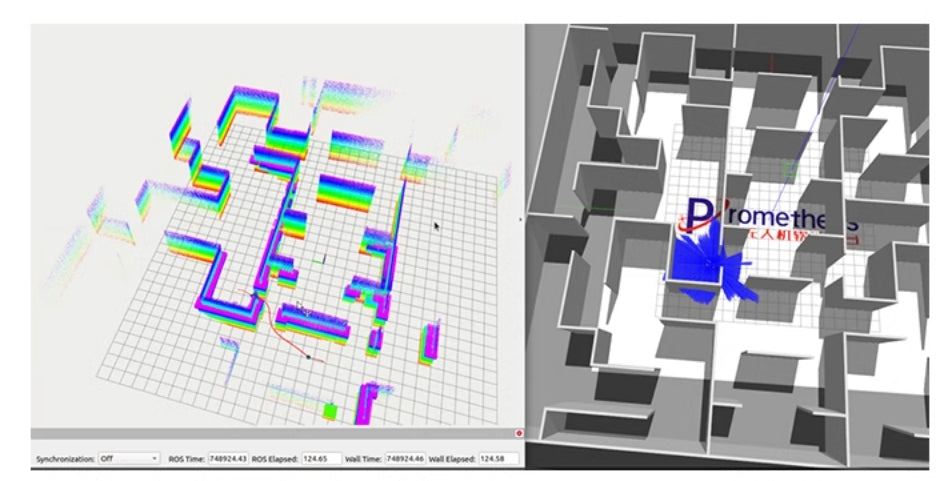
Demo della funzione di simulazione integrata
- Simulazione 3D LiDAR SLAM e pianificazione del percorso EGO-Swarm
Questo illustra la simulazione di Slam LiDAR 3D E Pianificazione del percorso EGO-Swarm all'interno di un ambiente strutturato, mostrando le capacità del sistema in una demo controllata.
Caratteristiche hardware
Telaio del drone
IL Modello DP1000 la piattaforma per droni di livello industriale utilizza un FOC (controllo orientato al campo) sistema di alimentazione, consentendo al motore di ruotare stabilmente, con basso rumore, alta efficienza e rapida risposta dinamica. L'intero sistema drone raggiunge uno stato "pronto al volo" con un'eccellente qualità hardware, garantendo prestazioni di volo stabili. Supporta durata ultra-lunga (70 minuti senza carico utile), mentre il Drone P600 richiede circa 24 minuti per la stabilizzazione durante il posizionamento.

Unità di calcolo potente
- Unità di elaborazione micro edge di Allspark, dotato di Modulo NVIDIA Orin NX, fornendo Potenza di calcolo in virgola mobile 100 TOPS.
- Dimensioni compatte, peso leggero, elevata compatibilità del sistema e Elaborazione ad alte prestazioni accelerata da GPU.
- Preinstallato con tutti gli ambienti di sviluppo, pronto all'uso, migliora l'efficienza dello sviluppo secondario.
- Dimensioni: 102,5 mm × 62.Dimensioni: 5 mm × 31 mm

Controller di trasmissione delle immagini integrato
UN telecomando per droni di livello industriale combinando dati, immagini e controllo in uno.
- Banda di frequenza: 2,4-2,483 GHz
- Distanza massima di trasmissione: 30 chilometri
- Qualità dell'immagine: 1080P
- Durata della batteria: 8-15 ore di funzionamento continuo
Durante il funzionamento del drone, gli utenti possono monitorare le informazioni del drone in tempo reale, visualizzare le riprese della telecamera e contemporaneamente controllare il drone con il joystick, garantendo una visualizzazione completa delle operazioni di volo.

Doppia antenna RTK ad alta precisione
Il drone è dotato di un Modulo di posizionamento RTK-GNSS, che utilizza la tecnologia di posizionamento differenziale a fase portante veloce e algoritmi di soppressione multipath per fornire una precisione di posizionamento a livello centimetrico per i droni. Può ricevere simultaneamente dati RTCM da più stazioni di riferimento basate a terra, supportando calcoli RTK di baseline brevi, medie e lunghe.
Con un multi-lingua integrato Interfaccia utente grafica Web, consente la configurazione a soglia zero e la visualizzazione dei dati e i processi di aggiornamento. Il ricevitore è inoltre dotato di un'interfaccia di configurazione della pagina web intuitiva, che riduce notevolmente la barriera operativa. Offre interfacce avanzate ed è adattabile a vari scenari applicativi, offrendo prestazioni eccezionali nel posizionamento preciso.

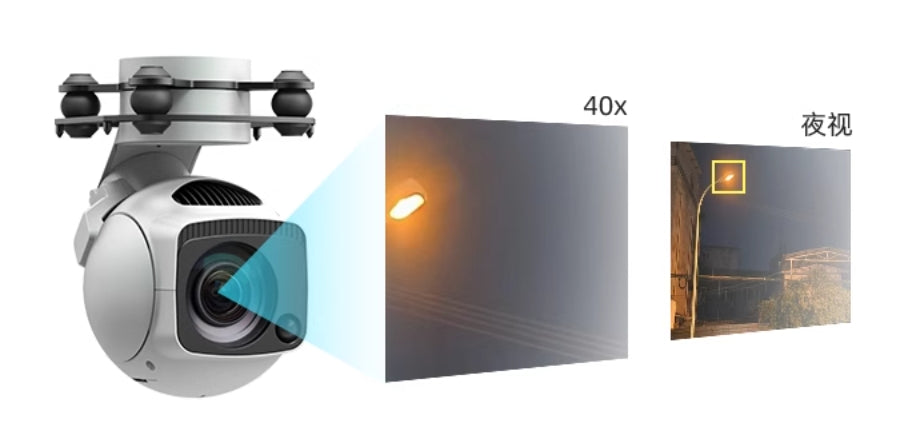
Gimbal ottico-elettronico 40x
Dotato di un gimbal non ortogonale a 3 assi ad alta precisione, è dotato di una fotocamera con zoom ottico 10x da 8,29 megapixel combinata con tecnologia di zoom digitale, che raggiunge un ingrandimento fino a 40x. Può produrre 4K@30FPS video trasmette in streaming sulla rete. Inoltre, è dotato di un modulo di illuminazione laser, che consente di ottenere immagini nitide anche in ambienti completamente bui.
Rilevamento LiDAR 3D MID 360
Mid-360 è un sensore laser di rilevamento e misurazione della distanza conveniente, sicuro e affidabile. È ampiamente utilizzato in settori quali robot logistici, robot industriali e città intelligenti, supportando funzioni come mappatura, posizionamento, identificazione ed evitamento degli ostacoli. Mid-360 può rilevare oggetti da una distanza di 0,1 metri a una distanza di 100 metri. Presenta dimensioni compatte, ampio campo visivo, alta risoluzione, elevata affidabilità e un IMU integrato.
Specifiche:
- Campo visivo: 360° × 59°
- Distanza minima di rilevamento: 0,1 metri
- Portata (@10% di riflettività): 40 metri
- Frequenza del punto: 200.000 punti/secondo
- Dimensioni (mm)Dimensioni: 65 × 65 × 60
- Peso: 265 g
Caratteristiche del software
Sistema software Prometheus V2
La piattaforma di sviluppo si basa su ROS e sul framework open source Prometheus, offrendo funzionalità avanzate e un gran numero di interfacce di sviluppo secondarie per una personalizzazione efficiente. Fornisce interfacce per lo stato UAV e i dati dei sensori, tra cui informazioni sulla posizione, modalità di volo, stato della batteria e IMU. Inoltre, offre interfacce di controllo per posizione, velocità, accelerazione e assetto, nonché programmi di esempio per l'utilizzo dell'interfaccia di sviluppo. L'UAV include anche funzioni di ispezione di sicurezza del volo integrate (non evitamento degli ostacoli), consentendo l'atterraggio automatico in situazioni anomale per ridurre i rischi di incidente, rendendo lo sviluppo più sicuro.

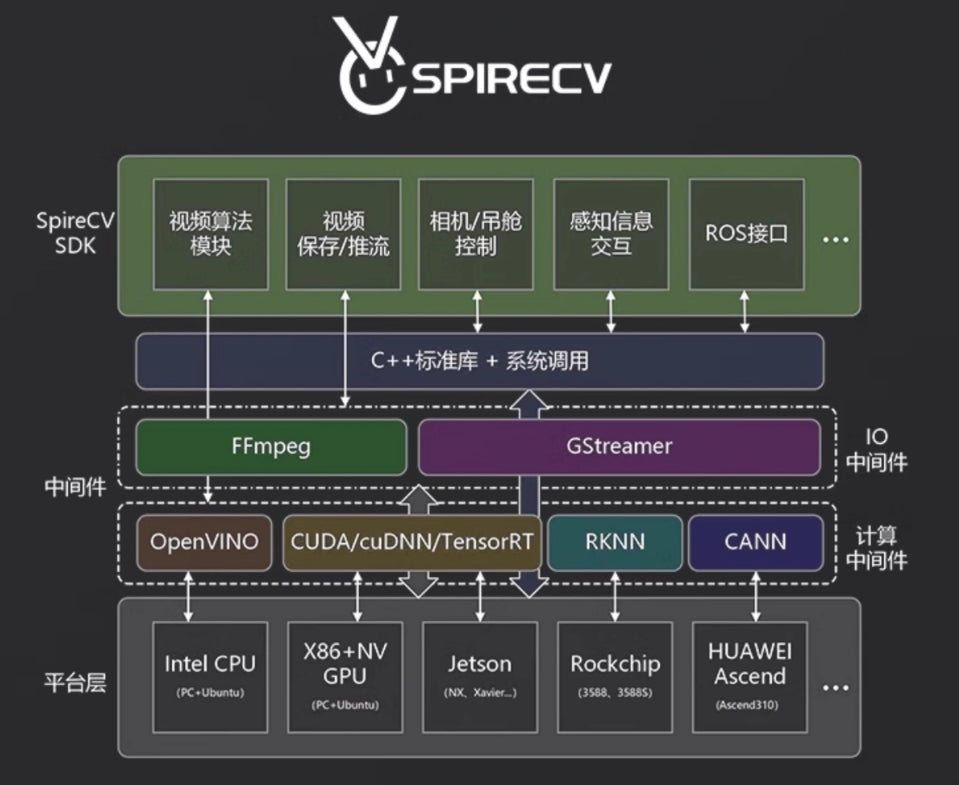
Libreria Vision SpireCV
Basato sulla libreria di visione SpireCV, questo è un SDK di elaborazione in tempo reale delle immagini di bordo progettato specificamente per sistemi intelligenti senza pilota. Le sue caratteristiche principali includono controllo gimbal/telecamera, archiviazione video, streaming, rilevamento target, riconoscimento e tracciamento. Mira a fornire agli sviluppatori di sistemi intelligenti senza pilota capacità di elaborazione della visione ad alte prestazioni, altamente affidabili, semplici e ricche di funzionalità. Questo modello supporta la formazione YOLO per la funzionalità di tracciamento dei veicoli point-and-click.
Sistema di stazione di terra Prometheus
La stazione di terra Prometheus è un'interfaccia uomo-macchina sviluppata utilizzando Qt, basata sul sistema Prometheus. Utilizza la comunicazione TCP/UDP per semplificare la configurazione della comunicazione multi-macchina. La stazione di terra consente agli utenti di replicare rapidamente varie funzioni del sistema Prometheus, fornendo un monitoraggio in tempo reale dello stato UAV, nonché funzionalità come operazioni di comando di controllo della posizione, decollo e atterraggio con un clic.
Applicazioni
-
Ricerca scientifica e sviluppo dell'intelligenza artificiale
- Test dell'algoritmo AI
- Analisi avanzata dei dati dei sensori
- Elaborazione e tracciamento delle immagini in tempo reale
-
Applicazioni industriali
- Mappatura e navigazione di precisione in ambienti complessi
- Rilevamento ed evitamento degli ostacoli nella logistica e nell'immagazzinamento
- Ispezione di infrastrutture quali linee elettriche e condotte
-
Usi accademici ed educativi
- Programmazione secondaria per la ricerca sull'intelligenza artificiale basata su ROS
- Dimostrazioni ed esperimenti di laboratorio
- Formazione sulla navigazione autonoma dei droni
-
Soluzioni per città intelligenti
- Ricostruzione spaziale 3D per la pianificazione urbana
- Monitoraggio e gestione del traffico
- Sorveglianza e analisi ambientale
-
Sviluppo personalizzato
- Prototipazione per applicazioni industriali specializzate
- Test e integrazione di nuovi componenti hardware e software
-
Risposta ai disastri e monitoraggio ambientale
- Ispezione aerea e monitoraggio nelle aree colpite da calamità naturali
- Raccolta di dati ambientali per la ricerca e l'elaborazione delle politiche
Il P600 offre flessibilità e funzionalità senza pari, consentendo a ricercatori, ingegneri e sviluppatori di realizzare progetti complessi in scenari diversi.
Related Collections







