







P600 ドローン科学研究ドローン - ROS AI 実験二次プログラミング産業開発プラットフォームスタジオラボドローン DIY キット
P600 ドローン科学研究ドローン - ROS AI 実験二次プログラミング産業開発プラットフォームスタジオラボドローン DIY キット
RCDrone
受取状況を読み込めませんでした
概要
の P600 科学研究用ドローン 科学研究、産業開発、AI実験のために設計された最先端のプラットフォームです。高性能な NVIDIA Jetson Orin NX コンピューティング モジュール、それは実現します 100 TOPSの計算能力高度なAIアプリケーションに最適です。このドローンの特徴は 40倍光学ズーム ジンバルカメラ 高解像度画像用 3D ライダー スラム 正確なマッピングのため、そして RTK測位 センチメートルレベルの精度を実現。 統合されたPrometheus V2ソフトウェア そして SpireCV ビジョンライブラリ 二次プログラミングをサポートし、開発者にとって多目的なツールとなっています。飛行時間は最大 21分、 600 mm対角軸、そして強力な 離陸重量4.05kgP600 は、動的な研究開発環境向けに最適化されています。
仕様
航空機
| 属性 | 詳細 |
|---|---|
| 航空機の種類 | クワッドコプター |
| 離陸重量 | 約4.05kg(電池含む) |
| 対角軸距離 | 600ミリメートル |
| 寸法 | 長さ469mm、幅469mm、高さ400mm |
| 最大ホバリング時間 | 約21分 |
| ホバリング精度 | RTK: ±0.015 m (水平)、±0.01 m (垂直) 3D LiDAR SLAM: ±0.2 m (水平)、±0.1 m (垂直) |
| 動作温度 | 6℃~40℃ |
| メインMCUチップ | STM32H743VIT6 / 216 MHz / 2Mプログラムストレージ / 512 KBデータストレージ |
| 国際ミュー | ICM20689 |
| バロメーター | BMP388 |
| 今月 | AT24C64 |
| I/O インターフェース | PX4IO-V2内蔵、8をサポートPWMインターフェース、1RC インターフェース (SBus、PPM、DSM をサポート) 外部インターフェース: 3UART(GH1.25 6ピン)、1CAN (GH1.25 4ピン)、フライトコントロールUSBインターフェース (Type-C) |
オンボードコンピューター
| 属性 | 詳細 |
|---|---|
| 名前 | Allspark-Orin NX オンボード コンピューター |
| モデル | IA160_V1 |
| 重さ | 約188g |
| 寸法 | 102.5 mm × 62.5 mm × 31 mm(ファンを含む) |
| プロセッサ | NVIDIA ジェットソン オリン NX |
| メモリ | 16GB LPDDR5 |
| コンピューティングパワー | 100トップス |
| グラフィックプロセッサ | 1024コアのNVIDIA AmpereアーキテクチャGPUの32個のTensorコアを統合 |
| CPU | 8 コア Arm® Cortex®-A78AE v8.2 64 ビット CPU (2MB L2 + 4MB L3) |
| ソリッドステートドライブ | 128 GB (M.2インターフェース、拡張可能) |
| イーサネット | 100 Mbps x2(専用イーサネットポート1つ、交換可能ポート1つ) |
| Wi-Fi | 5G |
| 画面 | マイクロHDMI(1920*1080P) |
| USBポート | USB2.0: タイプA x1、タイプC x1 USB2.0: OTG x1 |
| 電源 | 10~26V @ 3A |
パワーバッテリー
| 属性 | 詳細 |
|---|---|
| モデル | LPB610HV |
| 容量 | 10000mAh |
| バッテリー重量 | 1.2キロ |
| 動作電圧 | 22V〜26.1V |
| 保存電圧 | 23.1V |
| 寸法 | 長さ180mm、幅90mm、高さ63mm |
リモートコントローラー
| 属性 | 詳細 |
|---|---|
| モデル | H16 |
| チャンネル | 16 |
| 頻度 | 2.400〜2.483GHz |
| 動作電圧 | 4.2V |
| バッテリー | 20000mAh |
| 充電ポート | タイプC 9V-2A |
| 重さ | 1034グラム |
| 寸法 | 長さ272mm、幅183mm、高さ94mm |
通信リンク
| 属性 | 詳細 |
|---|---|
| モデル | R16 |
| 通信距離 | 約600メートル、帯域幅3.5Mbps |
| 動作電圧 | 7.2V〜72V |
| インターフェース | 2UART、1イーサネット、1HDMI、1タイプC |
| 寸法 | 長さ76mm、幅69mm、高さ11mm |
ジンバルカメラ
| 属性 | 詳細 |
|---|---|
| モデル | GX40 |
| ジンバル寸法 | 長さ85.8mm、幅86mm、高さ129.3mm |
| GCU 寸法 | 長さ45.4mm、幅40mm、高さ13.5mm |
| ジンバル重量 | 405グラム |
| GCU 重量 | 18.6グラム |
| 動作電圧 | 14V〜53V |
| ストリーミングプロトコル | RTSP (デフォルト) |
| エンコード形式 | H.264 / H.264H / H.264B / H.265 / MJPEG |
| 解決 | - 4K30fps - 1080P@30fps - SCGA(12801024)@30fps <br> - 1.3M(1280960)@30fps - 720P@30fps |
| ビットレート | 0.25Mbps~[email protected]、0.5Mbps~[email protected] |
レンズ
| 属性 | 詳細 |
|---|---|
| タイプ | 光学ズームレンズ |
| 焦点距離 | 4.8〜48ミリ |
| 絞り(F/NO) | f1.7〜f3.2 |
| 対角視野角(D) | 67.2°~7.6° |
| 垂直視野角(V) | 36.1°~3.7° |
| 水平視野角(H) | 60.2°~6.6° |
| 光学ズーム比 | 10倍 |
イメージセンサー
| 属性 | 詳細 |
|---|---|
| センサータイプ | シーモス |
| 有効ピクセル | 8.29M |
| センサーサイズ | 1/2.8インチ |
| ピクセルサイズ | 1.45×1.45(μm) |
| 電子シャッタースピード | 1〜1/30000秒 |
照明器具
| 属性 | 詳細 |
|---|---|
| タイプ | レーザ |
| 波長 | 850±10nm |
| 力 | 0.8W |
| 照射距離 | ≤200メートル |
RTK
| 属性 | 詳細 |
|---|---|
| モデル | M15-RTK |
| 重さ | 90グラム |
| 寸法 | 長さ80mm、幅50mm、高さ20mm |
| サポートされている衛星の種類 | BDS/GPS/GLONASS/QZSS |
| 電源 | 9~36V(12V推奨) |
| アンテナコネクタ | SMA-F |
| 機能ポート | UARTx2、CANx1、USB2.0x1 |
充電器
| 属性 | 詳細 |
|---|---|
| モデル | C1-XR |
| AC入力電圧 | 100〜240V |
| DC入力電圧 | 11〜18V |
| 寸法 | 長さ130mm、幅115mm、高さ61mm |
| 重さ | 380グラム |
| 充電電流 | 0.1A~10A |
| サポートされているバッテリーセル | 1〜6セル |
3Dライダー
| 属性 | 詳細 |
|---|---|
| モデル | ミッド360 |
| レーザー波長 | 905 nm |
| 検出範囲 | 40 m(反射率105%の場合) |
| 視野角 (FOV) | 水平: 360°、垂直: -7°~52° |
| 最小範囲 | 0.1メートル |
| ポイントクラウドレート | 10 Hz (標準) |
| 1秒あたりのポイント | 200,000 ポイント/秒 |
| データインターフェース | 100 BASE-TX イーサネット |
| データ同期 | IEEE 1588-2008 (PTP v2)、GPS |
| 内部IMU | ICM40609 |
| 電源 | 7〜27V |
| 寸法 | 65mm(幅)×65mm(奥行き)×60mm(高さ) |
| 重さ | 115グラム |
| 動作温度 | -20℃~55℃ |
ソフトウェアパラメータ
オンボードコンピューター
| 属性 | 詳細 |
|---|---|
| モデル | ジェットソン オリン NX |
| オペレーティング·システム | ウブントゥ 20.04 |
| ユーザー名 | アモフ |
| パスワード | アモフ |
| L4T バージョン | 35.2.1 |
| ジェットパックバージョン | 5.1 |
| CUDA バージョン | 11.4.315 |
| リアルセンスSDK | 2.50.0 |
| ROSバージョン | ノエティック |
| OpenCV バージョン | 4.7.0 |
| リアルセンスROS | 2.3.2 |
パッケージリスト
| 名前 | 仕様/モデル | 数量/単位 |
|---|---|---|
| P600 主力機 | P600-オールパーク2-RTK-GX40-S3 | 1セット |
| M15-RTK 地上ターミナル | M15-RTK | 1個 |
| GNSS マッシュルームアンテナ | キノコアンテナ | 1個 |
| GNSSアンテナ延長ケーブル | アンテナ延長ケーブル | ケーブル1本 |
| H16 リモートコントローラー | H16 | 1ユニット |
| 6S 10000mAhパワーバッテリー | 6S 10000mAh | 1セット |
| 3S 4000mAhリチウム電池 | 3S 4000mAh | 1セット |
| スマートバランスチャージャー | C1-XR | 1ユニット |
| ネットワークケーブル | 1.5メートル | ケーブル1本 |
| 安全ロープ | 50メートル | 1パッケージ |
| HDMIブラケット | / | 1個 |
| HDMI アダプタケーブル | / | 1個 |
| コンピュータの構成 | / | 1個 |
| 2D ドロッププレート | 35×35センチ | 1個 |
| 航空ケース | 740×540×510mm | 1セット |
| アクセサリケーブルパック | / | 1パッケージ |
| 証明書 | / | 1枚 |
| 機能テストチェックリスト | / | 1枚 |
詳細
プロメテウス 600 科学研究用ドローン開発プラットフォーム
の プロメテウス 600 科学研究用ドローン開発プラットフォーム (P600と呼ばれる)は、P600シリーズの第4世代製品です。2つのコアテクノロジーを深く統合しています。 プロメテウス そして スパイアCV40倍光学ズームジンバルカメラを搭載しており、長距離ターゲットの検出と追跡、高高度からの自律着陸、空中巡航ミッションなどが可能になります。
このシステムは3D LiDAR SLAMをサポートし、 ファストリオ高精度な3D SLAMマッピングを実現します。さらに、 EGO-Swarm マルチエージェントコラボレーションアルゴリズム屋内外の 3D 空間再構築やドローン航行中の障害物回避など、さまざまなシナリオでの応用が可能になります。
これらの高度な機能は、 プロメテウスプロフェッショナル地上局リアルタイムの視覚的なフィードバック、操作の監視、動的なパラメータ調整を提供し、開発者が二次開発をより簡単に習得し、加速できるようにします。

P600ドローンの3つのバージョン

光学電子ジンバルの柔軟な制御
GX40ジンバルカメラはマルチシナリオコントロールをサポートし、ウェイポイントナビゲーション中にターゲット検索を可能にするチェーンベースのリモートコントロールを統合しています。 SpireCV ビジョンライブラリターゲットの検出と追跡を容易にし、ジンバルをターゲットにリアルタイムでロックすることを実現します。
- 夜間照明
- ターゲット検出と追跡

ターゲットクリックとトラッキング
使用方法 YOLOv5検出アルゴリズム COCOユニバーサルデータセットを活用して、ターゲットを検出し追跡します。 ナノトラック追跡アルゴリズム 選択したターゲットをロックして追跡します。状況の変化がなければ、最大30メートル離れたターゲットを識別して追跡できます。 40倍光学ズームと電子ズーム、長距離のターゲット検出と追跡が実現します。ドローン追跡中は、 プロメテウスプロフェッショナル地上局 動的な距離ベースのターゲット追跡スイッチを可能にします (デフォルトは 10 メートル)。
- 30mで追跡
- 20mで追跡
- 10mで追跡

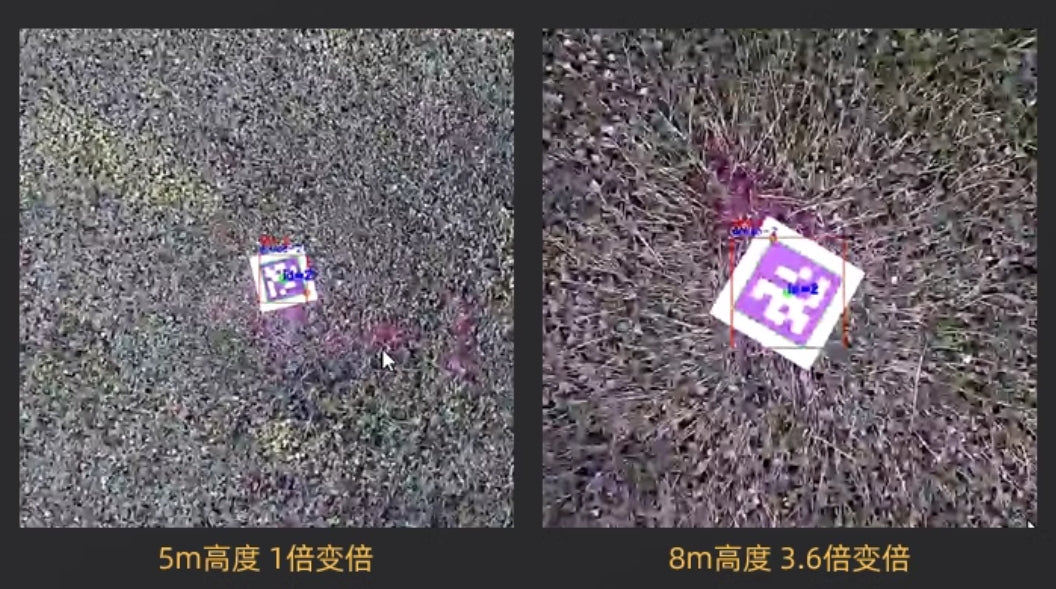
QRコード誘導着陸
使用方法 SpireCV ビジョンライブラリ、QRコードの正確な検出と位置推定を実現します。GX40は、さまざまな高度からQRコードに精密誘導着陸を実行できます。ジンバルカメラの中心は、30cmの誤差範囲内でQRコードの中心と一致します。
- 高度5m、1倍ズーム
- 高度8m、3.6倍ズーム
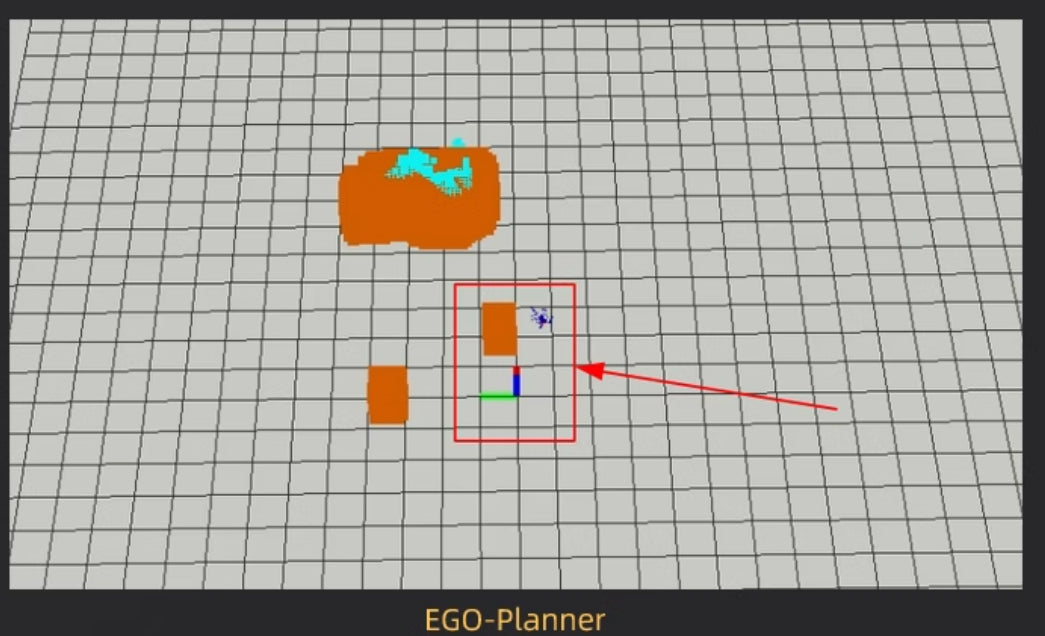
EGOプランナー
サポートする EGO-Planner 経路計画アルゴリズム そして提供する オクトマップマッピングアルゴリズムプロフェッショナル地上局と組み合わせることで、自律的な 3D 動的経路計画が可能になります。
安定性と信頼性に優れたドローン制御アプリケーション
P600ドローンは高精度RTK装置を搭載しており、屋外で水平精度最大1cm、垂直精度最大1.5cmの高精度ホバリングを実現。 Prometheus ソフトウェア システム制御モジュール正確なドローン制御を可能にします。
ドローン制御モジュールは、ソフトウェア プログラムとドローンの間の「ブリッジ」として機能し、初期位置ホバリング、現在位置ホバリング、着陸、移動などの複数の制御状態を提供します。これらには、通常のシステム位置、速度、位置と速度の統合制御、軌道制御モードの 6 つの制御モードが含まれます。合計で 7 つの制御モードを提供します。

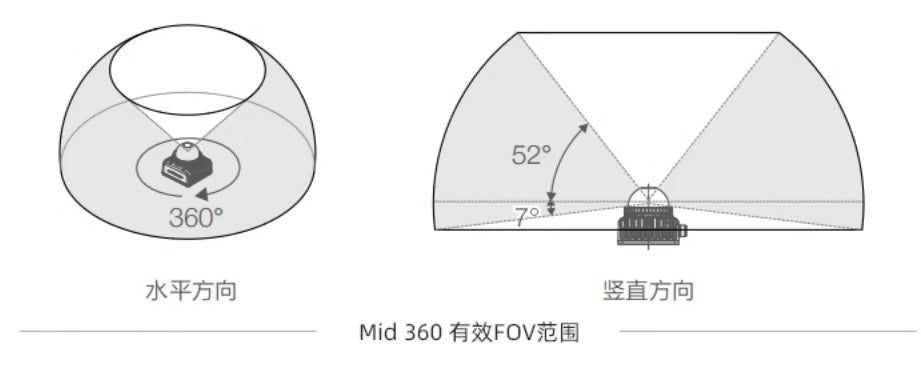
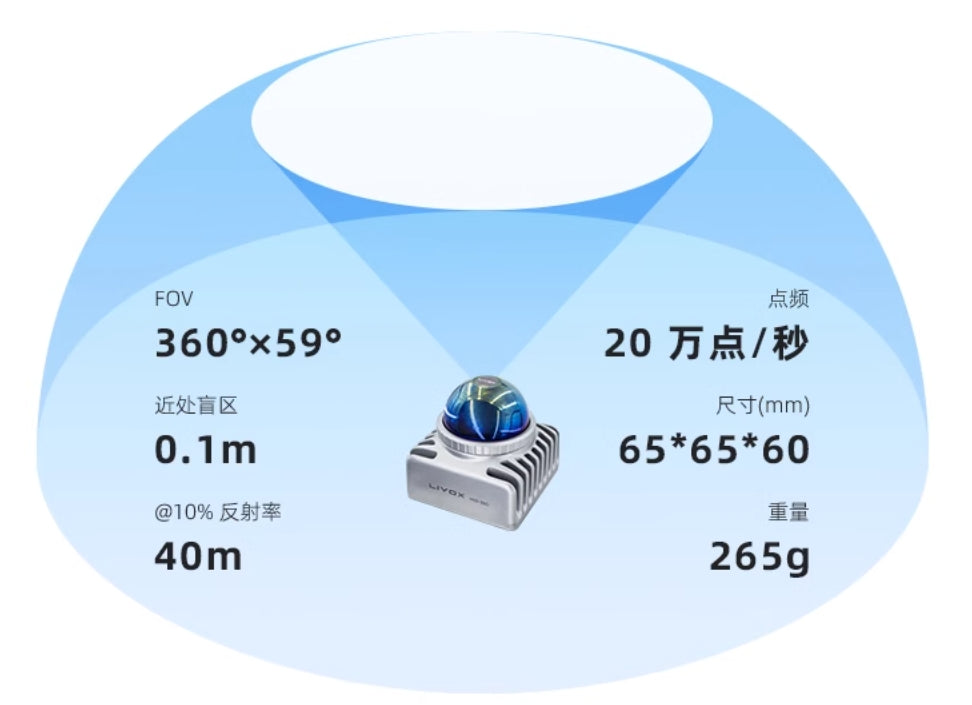
3D LiDAR ミッド360
- 低死角 | 広い視野 | マルチシナリオアプリケーション
の ミッド360 特徴 360°水平視野角 そして 最大垂直視野角59°対象物の反射率が10%の場合、最大検出範囲は 40メートル、そして死角範囲は 10メートル低照度や強光など、さまざまな複雑な環境に適応します。
Mid-360モジュールを搭載した P600ドローン 死角をパノラマでカバーし、さまざまなシナリオの環境でドローンのシームレスな操作を実現します。
- 図の説明:
- 水平方向: 360°
- 垂直方向: 最大視野角 52°

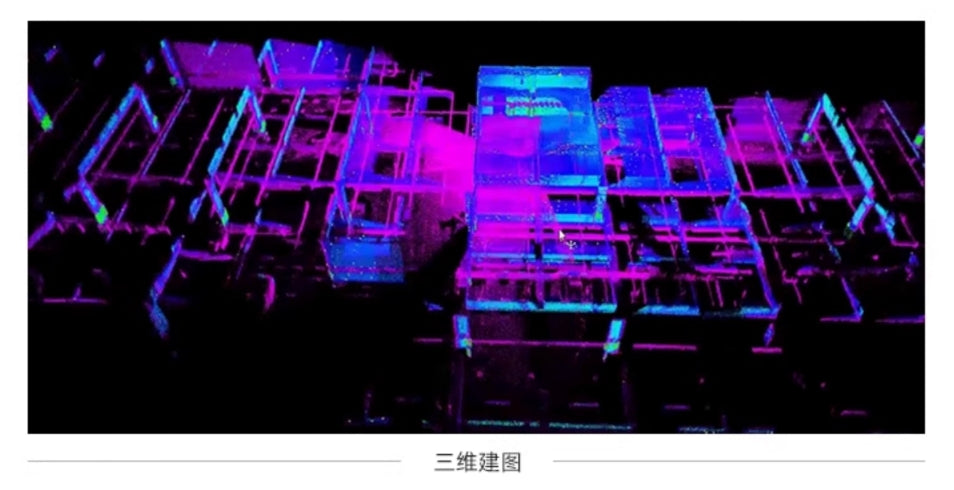
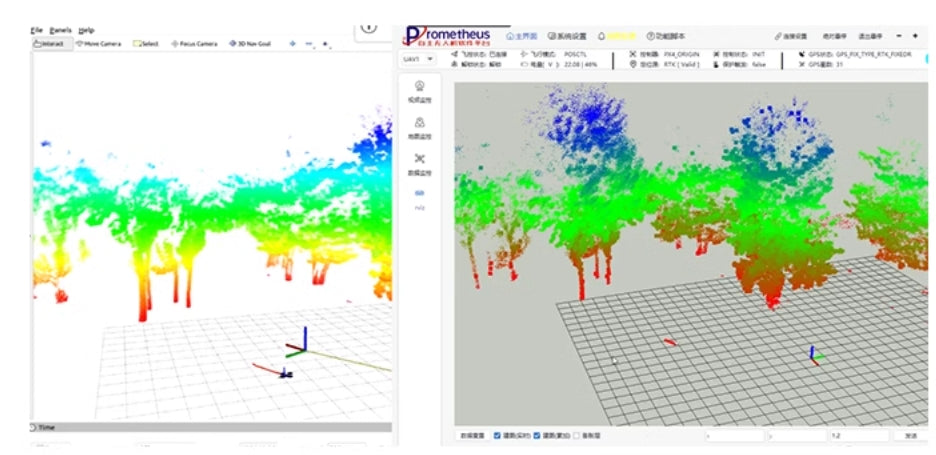
迅速かつ正確な3D環境マッピング
の P600ドローン 高度な環境感知機能を備えており、飛行中に周囲の環境データを迅速に収集することができます。このデータはリアルタイムで処理され、 3D環境マップさまざまなタスクに対して正確な空間認識とナビゲーションのサポートを提供します。
ナビゲーションと障害物回避のためのEGO-Swarm経路計画
の ミッド360 点群データと位置データを公開し、 EGO-Swarm 経路計画アルゴリズムドローンの動的な環境変化への自律的な適応能力を大幅に強化。移動中に障害物をリアルタイムで分析して対応し、最大速度で追跡対象を動的に調整できます。 2メートル/秒これにより、未知で複雑な運用シナリオでも優れた柔軟性と適応性が確保されます。
この機能により、ドローンの作業効率が大幅に向上し、さまざまなタスクを効率的かつ正確に完了できるようになります。
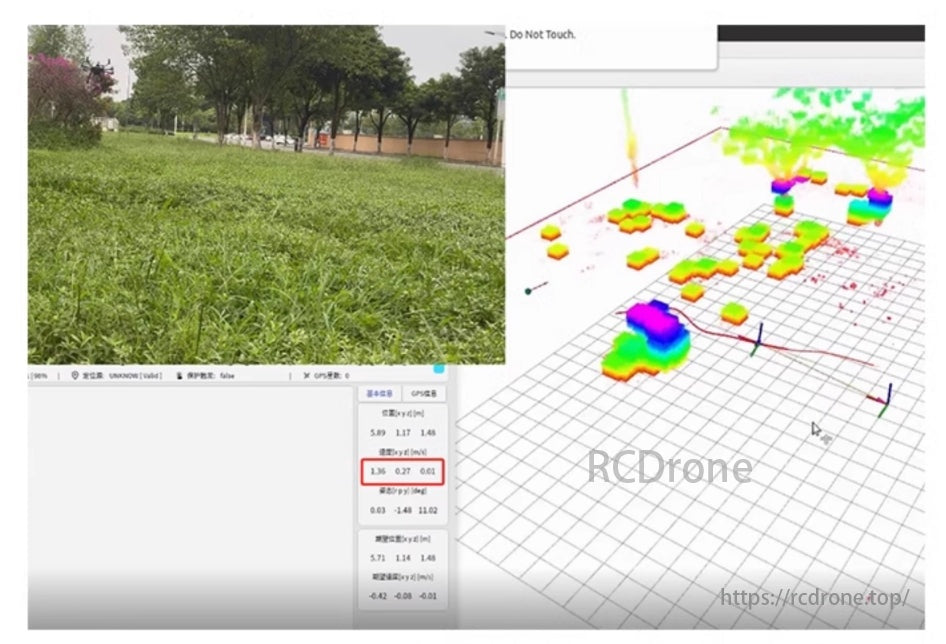
プロメテウス プロフェッショナル グラウンドステーション ドローンインタラクション
- 地上局とのやり取り
これは、 プロメテウスプロフェッショナル地上局3D環境マッピングを通じてドローンとのシームレスな通信と操作を可能にします。
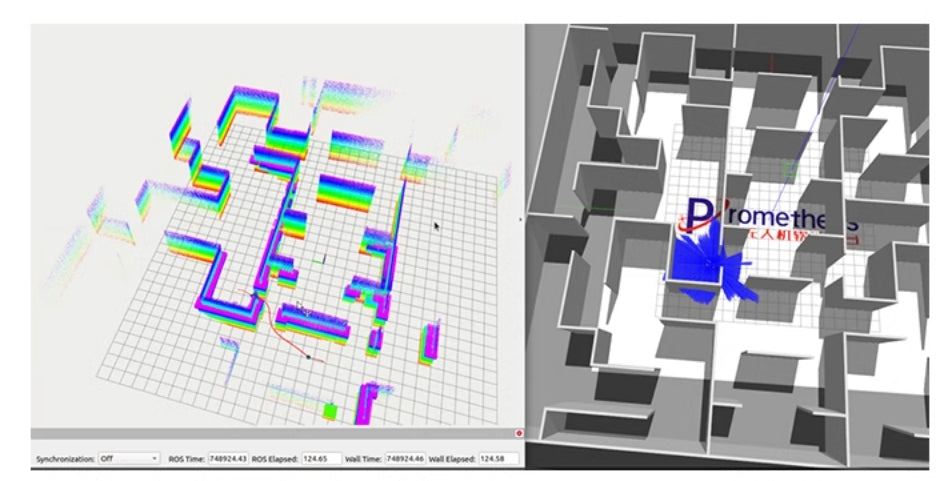
統合シミュレーション機能デモ
- シミュレーションによる 3D LiDAR SLAM と EGO-Swarm 経路計画
これは、 3D ライダー スラム そして EGO-Swarm 経路計画 構造化された環境内で、制御されたデモでシステムの機能を紹介します。
ハードウェア機能
ドローンフレーム
の ケドウェイ DP1000 産業グレードのドローンプラットフォームは、 FOC(フィールド指向制御) 電力システムにより、モーターが安定して回転し、低騒音、高効率、迅速な動的応答を実現します。ドローンシステム全体が優れたハードウェア品質で「飛行準備完了」状態を実現し、安定した飛行性能を保証します。 超長時間持続(積載なしで70分)、一方、 P600ドローン 約 安定化には24分 位置決め中。

強力なコンピューティングユニット
- Allspark マイクロエッジコンピューティングユニット、装備 NVIDIA Orin NX モジュール、提供 100 TOPSの浮動小数点演算能力。
- コンパクトなサイズ、軽量、強力なシステム互換性、そして GPU アクセラレーションによる高性能コンピューティング。
- すべての開発環境がプリインストールされており、すぐに使用でき、二次開発の効率が向上します。
- 寸法: 102.5mm×62.5mm × 31mm

統合画像転送コントローラ
アン 産業グレードのドローンリモートコントローラー データ、画像、制御を 1 つに統合します。
- 周波数帯域: 2.4-2.483GHz
- 最大伝送距離: 30キロ
- 画質: 1080P
- バッテリー寿命: 8~15時間の連続動作
ドローン操作中、ユーザーはリアルタイムのドローン情報を監視し、カメラ映像を閲覧し、同時にジョイスティックでドローンを制御できるため、完全に視覚化された飛行操作が保証されます。

デュアルアンテナ高精度RTK
ドローンには RTK-GNSS測位モジュールは、高速キャリア位相差分測位技術とマルチパス抑制アルゴリズムを利用して、ドローンにセンチメートルレベルの測位精度を提供します。複数の地上基準局から RTCM データを同時に受信し、短、中、長のベースライン RTK 計算をサポートします。
多言語対応 ウェブ GUI、ゼロしきい値構成と視覚化されたデータ表示およびアップグレードプロセスを可能にします。受信機にはユーザーフレンドリーなウェブページ構成インターフェイスも備わっており、操作の障壁を大幅に下げます。豊富なインターフェイスを提供し、さまざまなアプリケーションシナリオに適応し、正確な位置決めにおいて優れたパフォーマンスを発揮します。

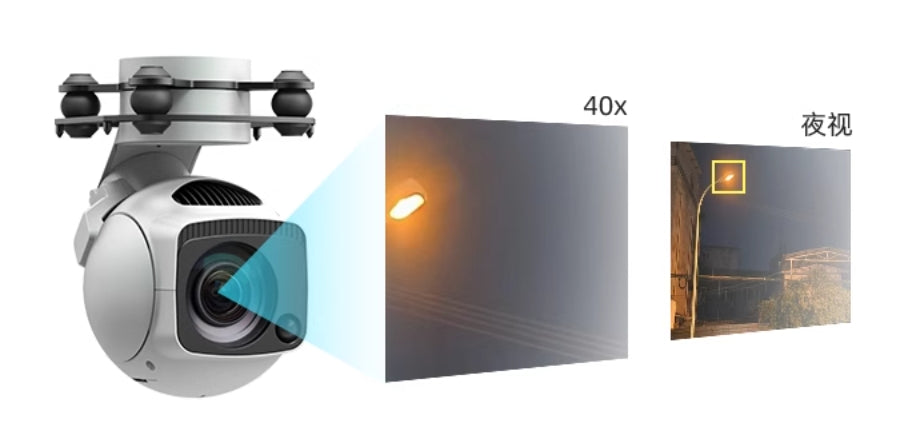
40倍光学電子ジンバル
高精度3軸非直交ジンバルを搭載し、829万画素10倍光学ズームカメラとデジタルズーム技術を組み合わせ、最大40倍の拡大率を実現。 4K@30FPS video ネットワーク経由でストリーミングします。また、レーザー照明モジュールを搭載しており、完全に暗い環境でも鮮明な画像を実現します。
MID 360 3D ライダー
Mid-360 は、コスト効率が高く、安全で信頼性の高いレーザー検出および測距センサーです。物流ロボット、産業用ロボット、スマート シティなどの分野で広く使用されており、マッピング、位置決め、識別、障害物回避などの機能をサポートしています。Mid-360 は、最短 0.1 メートルから最長 100 メートルまでの距離にある物体を検出できます。コンパクトなサイズ、広い視野、高解像度、高い信頼性、統合 IMU を特長としています。
仕様:
- 視野角: 360° × 59°
- 最小検出距離: 0.1メートル
- 範囲(@10% 反射率): 40メートル
- ポイント頻度: 200,000ポイント/秒
- 寸法(mm): 65 × 65 × 60
- 重さ: 265グラム
ソフトウェアの機能
Prometheus V2 ソフトウェア システム
開発プラットフォームはROSとPrometheusオープンソースフレームワークをベースとしており、豊富な機能と効率的なカスタマイズのための多数の二次開発インターフェースを提供しています。位置情報、飛行モード、バッテリーステータス、IMUなど、UAVの状態とセンサーデータ用のインターフェースを提供します。さらに、位置、速度、加速度、姿勢の制御インターフェースと、開発インターフェースの使用例プログラムも提供しています。UAVには飛行安全検査機能(障害物回避ではない)も組み込まれており、異常な状況での自動着陸を可能にして衝突リスクを軽減し、開発をより安全にします。

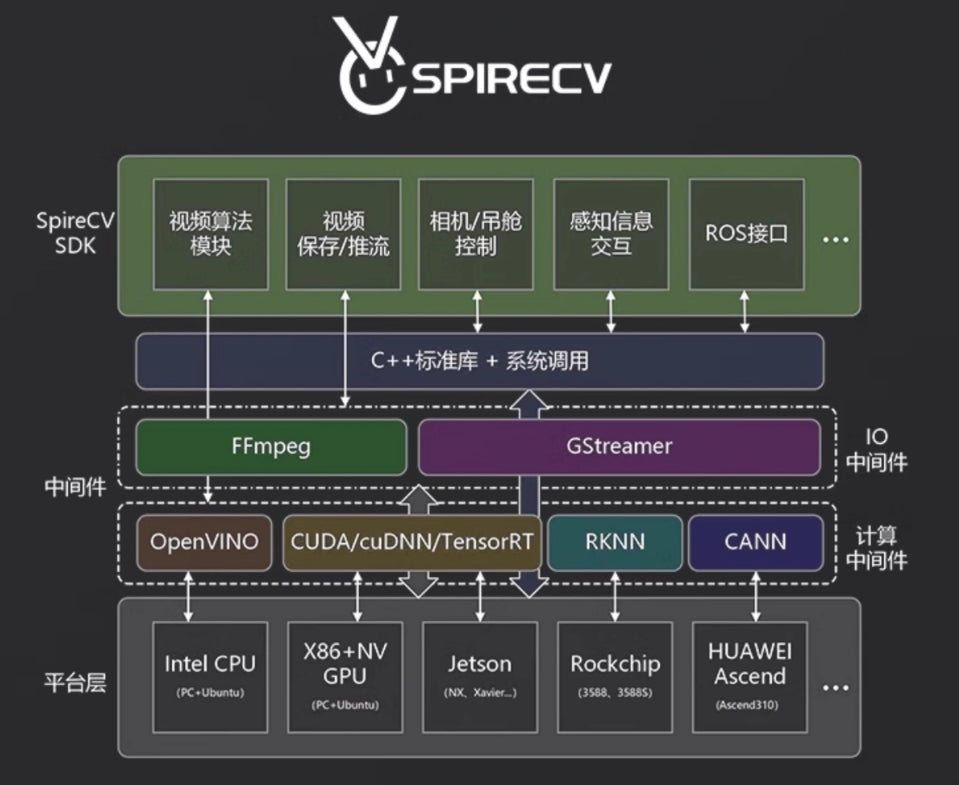
SpireCV ビジョンライブラリ
SpireCV ビジョン ライブラリをベースにした、インテリジェント無人システム専用に設計されたオンボード画像リアルタイム処理 SDK です。主な機能には、ジンバル/カメラ制御、ビデオ ストレージ、ストリーミング、ターゲット検出、認識、追跡などがあります。インテリジェント無人システムの開発者に、高性能で信頼性が高く、シンプルで機能豊富なビジョン処理機能を提供することを目的としています。このモデルは、ポイント アンド クリック車両追跡機能の YOLO トレーニングをサポートしています。
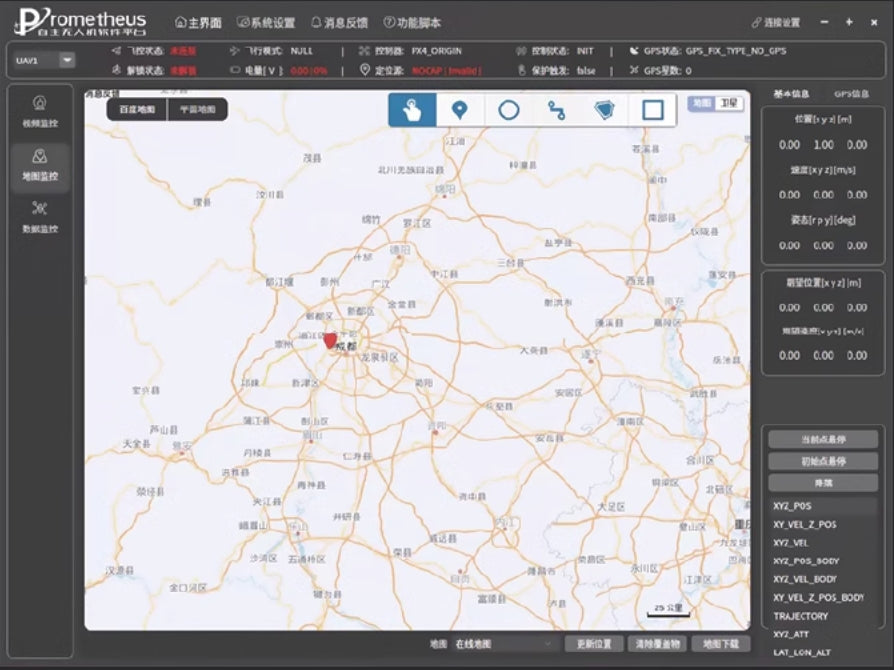
プロメテウス地上局システム
Prometheus 地上局は、Prometheus システムをベースに Qt を使用して開発されたヒューマン マシン インターフェイスです。TCP/UDP 通信を使用して、マルチ マシン通信の構成を簡素化します。地上局を使用すると、Prometheus システムのさまざまな機能を迅速に再現でき、UAV の状態をリアルタイムで監視できるほか、ワンクリックで離陸、着陸、位置制御コマンド操作などの機能も利用できます。
アプリケーション
-
科学研究とAI開発
- AIアルゴリズムのテスト
- 高度なセンサーデータ分析
- リアルタイム画像処理と追跡
-
産業用途
- 複雑な環境での精密なマッピングとナビゲーション
- 物流と倉庫における障害物の検出と回避
- 電力線やパイプラインなどのインフラの検査
-
学術および教育用途
- ROSベースのAI研究のための二次プログラミング
- 実験室でのデモンストレーションと実験
- ドローンの自律航行の訓練
-
スマートシティソリューション
- 都市計画のための3D空間再構築
- 交通監視と管理
- 監視と環境分析
-
カスタム開発
- 特殊な産業用途向けのプロトタイピング
- 新しいハードウェアおよびソフトウェアコンポーネントのテストと統合
-
災害対応と環境モニタリング
- 被災地における航空調査・監視
- 研究と政策立案のための環境データ収集
P600 は比類のない柔軟性と機能性を提供し、研究者、エンジニア、開発者がさまざまなシナリオにわたって複雑なプロジェクトを実行できるようにします。
Related Collections







