




CEREBOTO OpenArm 7DOF Kit Lengan Robotik – DIY atau Pra-Pasang, Kawalan Sumber Terbuka ROS/Python
CEREBOTO OpenArm 7DOF Kit Lengan Robotik – DIY atau Pra-Pasang, Kawalan Sumber Terbuka ROS/Python
CEREBOTO
Tidak dapat memuatkan ketersediaan pengambilan
Overview
Lengan Robotik CEREBOTO OpenArm 7DOF adalah lengan robotik berskala manusia yang direka untuk universiti, makmal, permulaan dan pembuat yang serius. Dengan 7 darjah kebebasan, jangkauan lengan 633 mm, beban biasa 4.1 kg dan beban puncak 6.0 kg setiap lengan, OpenArm memberikan gerakan berketepatan tinggi, interaksi fizikal yang selamat dan alat sumber terbuka yang kaya.
Anda boleh memilih kit perkakasan DIY untuk pemasangan secara langsung, atau lengan siap guna yang telah dikalibrasi di kilang. Konfigurasi lengan tunggal, lengan ganda dan lengan kuad juga tersedia.
Ciri Utama
-
Lengan robotik berskala manusia 7DOF – direka untuk sepadan dengan panjang lengan manusia 160–165 cm untuk manipulasi semula jadi dan teleoperasi.
-
Beban tinggi & kestabilan – beban biasa 4.1 kg, beban puncak 6.0 kg setiap lengan, dengan berat lengan ringan 5.5 kg.
-
Motor boleh dipandu balik & struktur mematuhi – interaksi yang selamat dan lancar untuk kolaborasi manusia-robot dan tugas yang dikawal oleh daya.
-
Gelung kawalan CAN-FD 1 kHz – kawalan masa nyata, latensi rendah untuk penyelidikan berprestasi tinggi dan aplikasi tahap industri.
-
Pembinaan sepenuhnya logam – struktur utama aloi aluminium dan keluli tahan karat yang kukuh untuk ketegaran dan ketahanan.
-
Perkakasan & perisian sumber terbuka – CAD terbuka, PCB, firmware dan perisian kawalan untuk penyesuaian mendalam.
-
Sokongan ROS, Python dan C++ – integrasi ROS rasmi serta API Python/C++ untuk pembangunan algoritma yang cepat.
-
Ekosistem yang kaya dan pengembangan – menyokong tangan robotik yang cekap, sarung tangan tangkapan gerakan dan asas mudah alih untuk platform robotik yang lengkap.
Spesifikasi Teknikal
-
Darjah Kebebasan: 7 DOF setiap lengan
-
Jangkauan Lengan: 633 mm
-
Muatan Tipikal: 4.1 kg
-
Muatan Puncak: 6.0 kg setiap lengan
-
Berat Lengan: kira-kira 5.5 kg setiap lengan
-
Bahan: Bahagian struktur aloi aluminium dan keluli tahan karat
-
Antara Muka Kawalan: CAN / CAN-FD, UART (melalui penyesuai USB2CANFD-X2 yang disertakan pada versi lengan ganda/kuadrupel)
-
Frekuesi Kawalan: sehingga 1 kHz gelung CAN-FD
-
Sokongan Perisian: rangka kerja ROS, API Python, API C++
-
Ergonomik: panjang lengan sesuai untuk pengguna dengan ketinggian badan 160–165 cm
Perisian & Ekosistem Sumber Terbuka
OpenArm adalah platform lengan robotik sumber terbuka sepenuhnya.Sumber rasmi termasuk:
-
Laman web: openarm.dev
-
Dokumentasi: docs.openarm.dev
-
GitHub: github.com/enactic/openarm
-
Video Tutorial: panduan YouTube rasmi untuk memulakan
Dengan fail CAD, PCB dan firmware terbuka, anda boleh mengubah suai mekanik, elektronik dan perisian kawalan, atau memperluas lengan dengan sensor dan pengganda akhir baru untuk topik penyelidikan anda sendiri.
Senario Aplikasi Tipikal
OpenArm direka sebagai platform penyelidikan dan pengajaran yang serba boleh dan berketepatan tinggi untuk:
-
Kursus robotik universiti dan eksperimen makmal
-
Institut penyelidikan dan projek makmal
-
Penyelidikan pembelajaran pengukuhan dan AI berasaskan fizik
-
Interaksi manusia-robot dan kajian robot kolaboratif
-
Ruang pembuat dan pasukan perkakasan sumber terbuka
-
Platform pendidikan dan latihan kejuruteraan
Dengan saiz berskala manusia dan penggerakan yang mematuhi, OpenArm adalah ideal untuk manipulasi, teleoperasi, pembelajaran tiruan, robotik bantuan dan banyak lagi.
Versi Produk &dan Konfigurasi
Versi 1 – Kit Perkakasan DIY
-
Untuk pengguna yang mempunyai kemahiran praktikal yang kuat dan ingin memahami dengan mendalam struktur mekanikal.
-
Termasuk semua bahagian mekanikal, elektrik dan bercetak 3D; anda memasang dan mengkalibrasi lengan itu sendiri mengikut manual.
Versi 2 – Lengan Robotik Siap
-
Untuk institut penyelidikan, makmal, syarikat dan pendidik yang memerlukan platform plug-and-play.
-
Sepenuhnya dipasang, diselaraskan dan dikalibrasi sebelum penghantaran; sedia untuk digunakan terus dari kotak.
Konfigurasi lengan yang tersedia (bergantung pada senarai):
-
Kit DIY – Lengan Tunggal
-
Lengan Siap – Lengan Tunggal
-
Kit DIY – Lengan Dwi
-
Lengan Siap – Lengan Dwi
-
Kit DIY – Lengan Quad
-
Lengan Siap – Lengan Quad
Isi Pakej
Setiap kit OpenArm atau sistem siap biasanya termasuk:
-
Komponen struktur utama aloi aluminium dan keluli tahan karat
-
Motor, papan pemacu, bekalan kuasa dan kabel
-
Bahagian bercetak 3D dan set skru
Versi dual-arm dan quad-arm: satu peranti USB2CANFD-X2 yang serasi dengan BOM rasmi (CEREBOTO adalah ejen domestik yang sah) untuk komunikasi PC-ke-CAN-FD.
Sokongan Sambungan Perkakasan
OpenArm menyokong pelbagai tambahan perkakasan (dijual secara berasingan), membolehkan anda membina sistem robotik yang lengkap:
-
Tangan robotik yang cekap – untuk penyelidikan manipulasi halus dan penggenggaman.
-
Set sarung tangan tangkapan gerakan – untuk teleoperasi intuitif dan pembelajaran imitasi.
-
Asas mudah alih – untuk menjadikan OpenArm sebagai platform manipulasi mudah alih.
Soalan Lazim
Q: Bolehkah lengan robot digunakan dengan segera?
A: Versi lengan siap sedia telah diselaraskan dan dikalibrasi sepenuhnya di kilang—hanya hidupkan dan mula bekerja. Kit perkakasan DIY memerlukan anda untuk memasang dan menyediakan sistem mengikut arahan.
Q: Adakah OpenArm serasi dengan ROS atau middleware lain?
A: Ya. OpenArm secara rasmi menyokong rangka kerja ROS, dan anda juga boleh mengawal lengan melalui API Python dan C++.
Q: Siapa yang sesuai untuk produk ini?
A: Penyelidik universiti dan institut, makmal AI & robotik, kursus pengajaran, pusat latihan kejuruteraan, dan penggemar yang berpengalaman.
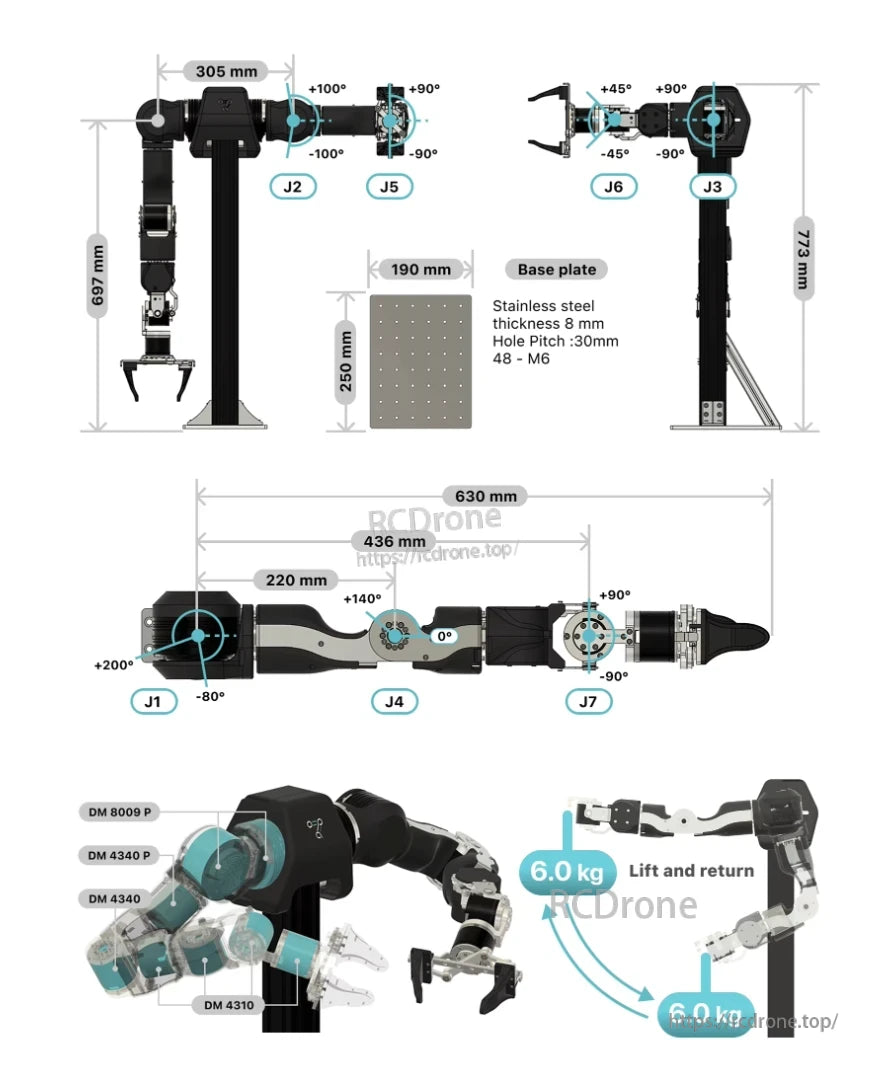
Robot Lengan Cereboto OpenArm 7DOF mempunyai tujuh sendi (J1–J7) dengan julat sudut yang ditentukan. Ia berdiri setinggi 697 mm atau 773 mm, mencapai 630 mm, dan dipasang pada plat asas keluli tahan karat 190×250 mm—tebal 8 mm dengan 48 lubang M6 yang jaraknya 30 mm. Digerakkan oleh motor DM8009P, DM4340P, DM4340, dan DM4310, ia mampu mengendalikan beban 6.0 kg dengan ketepatan. Direka untuk penggunaan industri dan penyelidikan, ia mengimbangi ketahanan struktur dengan kawalan gerakan yang tepat.

Related Collections



