Jenis pengawal penerbangan
-

Stak Pengawal Penerbangan
Terokai pilihan premium kami bagi stak pengawal penerbangan untuk drone FPV, menampilkan...
-
Pengawal Penerbangan F4
Koleksi Pengawal Penerbangan F4 menampilkan papan serba boleh dan berprestasi tinggi yang...
-
Pengawal Penerbangan F7
Koleksi Pengawal Penerbangan F7 menyampaikan kuasa dan ciri pengkomputeran yang dipertingkatkan ke...
-

Pengawal Penerbangan H7
The Koleksi Pengawal Penerbangan H7 menampilkan rangkaian sistem autopilot canggih yang dibina...
-

Pengawal Penerbangan Betaflight
Pengawal Penerbangan Betaflight adalah pengawal yang popular dan berprestasi tinggi yang direka...
-
Pengawal Penerbangan INAV
Terokai koleksi Pengawal Penerbangan INAV—ditala dengan ketepatan untuk dron sayap tetap, multirotor...
-
Pengawal Penerbangan Ardupilot
Terokai kami Koleksi Pengawal Penerbangan ArduPilot, menampilkan pengawal penerbangan sumber terbuka yang...
-
Pengawal Penerbangan PX4
The Pengawal Penerbangan PX4 tawaran koleksi sistem autopilot berprestasi tinggi sumber terbuka...
-

Pengawal Penerbangan SpeedyBee
SpeedyBee menawarkan pelbagai jenis pengawal penerbangan berprestasi tinggi yang serbaguna untuk drone...
-

Pengawal Penerbangan Matek
The Pengawal Penerbangan Matek koleksi menawarkan rangkaian luas pengawal penerbangan berprestasi tinggi...
-

Pengawal Penerbangan Kakute
The Pengawal Penerbangan Kakute siri oleh Holybro direka untuk dron FPV, pesawat...







Dengan aplikasi pengawal penerbangan
-
Pengawal Penerbangan FPV
Pengawal penerbangan FPV biasanya menggunakan pemproses siri STM32, biasanya dibahagikan mengikut prestasi...
-

Pengawal penerbangan sayap tetap
Terokai rangkaian premium kami Pengawal Penerbangan Sayap Tetap, direka bentuk untuk UAV...
-

Pengawal Penerbangan Dron Pertanian
Pengawal penerbangan (FC) bertindak sebagai otak bagi dron pertanian, mengatur kawalan penerbangan,...
-

Pengawal Penerbangan Perindustrian
Buka kunci ketepatan dan prestasi dengan kami Pengawal Penerbangan Industri koleksi, menampilkan...
-

Pengawal Penerbangan VTOL
The Pengawal Penerbangan VTOL menampilkan pengawal penerbangan termaju yang direka untuk dron...




Jenama pengawal penerbangan
-

Pengawal Penerbangan JIYI
JIYI mengkhusus dalam sistem autopilot canggih untuk drone pertanian dan industri. Barisan...
-

Pengawal Penerbangan Autopilot HolyBro
Terokai Pengawal Penerbangan Autopilot Holybro siri, menampilkan penyelesaian termaju untuk kenderaan sayap...
-
Pengawal Penerbangan Autopilot CUAV
Panduan Komprehensif untuk Memilih Pengawal Penerbangan Autopilot CUAV yang Tepat pengenalan Dalam...
-

Pengawal Penerbangan Iflight
Pengawal Penerbangan iFlight: Kawalan Ketepatan untuk Drone FPV tawaran iFlight pengawal penerbangan...
-

Pengawal Penerbangan GEPRC
Temui Pengawal Penerbangan GEPRC pengumpulan—sistem AIO dan tindanan berprestasi tinggi untuk dron...
-

Pengawal Penerbangan Boying
Terokai BOYING Pengawal Penerbangan koleksi, direka untuk dron pertanian ketepatan. Menampilkan kawalan...





-
SpeedyBee F405 V4 BLS 55A 30x30 FC&ESC Stack
Harga biasa Daripada $49.00 USDHarga biasaHarga seunit per -
SpeedyBee F405 Mini BLS 35A 20x20 Tindanan
Harga biasa Daripada $62.00 USDHarga biasaHarga seunit per -
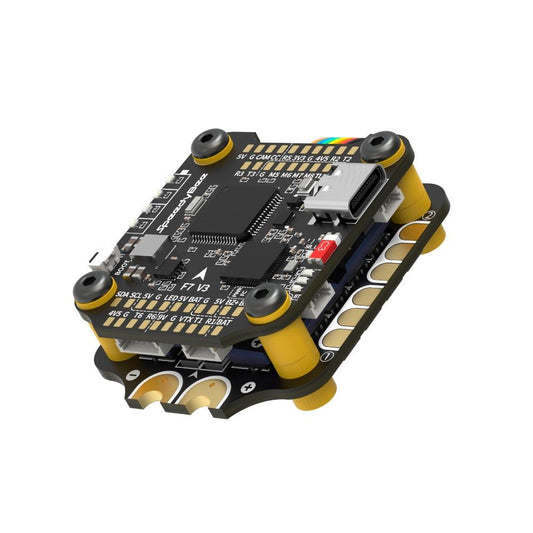
Pengawal Penerbangan SpeedyBee F7 V3
Harga biasa $63.00 USDHarga biasaHarga seunit per -
SpeedyBee F405 V5 OX32 55A 30x30 FC Pesawat Model & 4-dalam-1 ESC Stack dengan Giroskop ICM42688, STM32F405, Penalaan Tanpa Wayar & 16MB Blackbox
Harga biasa Daripada $69.00 USDHarga biasaHarga seunit per -
Pengawal Penerbangan Mateksys H743-SLIM V4, STM32H743 Dual ICM42688P, DPS368, 2-8S, USB-C, OSD
Harga biasa $129.00 USDHarga biasaHarga seunit per$0.00 USDHarga jualan $129.00 USD -
SpeedyBee F405 AIO 40A Bluejay 25.5x25.5 3-6S Pengawal Penerbangan
Harga biasa $110.60 USDHarga biasaHarga seunit per -
Foxeer F722 V4 Mini MPU6000 Pengawal Penerbangan
Harga biasa $85.00 USDHarga biasaHarga seunit per -
Pengawal Penerbangan Matek Mateksys - 2022 BAHARU H743-WING V3 H743 Wing untuk FPV Racing Drone RC Sayap Tetap
Harga biasa $156.18 USDHarga biasaHarga seunit per -
Pengawal Penerbangan MATEK F405-WING-V2 untuk Pesawat Sayap Tetap - STM32F405, ICM42688-P, OSD, 10 PWM
Harga biasa $85.00 USDHarga biasaHarga seunit per$0.00 USDHarga jualan $85.00 USD -
SpeedyBee F7 V3 BL32 50A 30x30 Tindanan Data Kotak Hitam Analisis Data iNAV Betaflight Emuflight Penyiar Perisian Tegar Wayarles
Harga biasa Daripada $65.40 USDHarga biasaHarga seunit per -
Pengawal Penerbangan Matek H743-SLIM dengan OSD - 5V BEC MPU6000 OSD Terbina Dalam Tiada Penderia Arus untuk Multicopter Drone RC Racing
Harga biasa $114.54 USDHarga biasaHarga seunit per -
Pengawal Penerbangan AeroEggTech AET-H743-Basic H743 untuk ArduPilot Fixed-Wing/VTOL, 10A BEC, Dwi IMU
Harga biasa Daripada $69.00 USDHarga biasaHarga seunit per -
Flywing ACE Kawalan Penerbangan Helikopter FBL Gyro H1 Versi Dinaik Taraf dengan GPS M10 Terbina Dalam dan Pusingan Berkoordinasi
Harga biasa $239.00 USDHarga biasaHarga seunit per -
SpeedyBee BT Nano 3 Wireless FC Konfigurasi
Harga biasa $19.00 USDHarga biasaHarga seunit per -
MATEK H743-WLITE - PENGAWAL PENERBANGAN Mateksys
Harga biasa $139.39 USDHarga biasaHarga seunit per -
Flywing H2 Helikopter Kawalan Penerbangan FBL Gyro (Versi Dinaik Taraf H1) dengan Dwi GPS, CAN Bus, Pengesanan Voltan 12S
Harga biasa $379.00 USDHarga biasaHarga seunit per -
Pixhawk PX4 PRO PIX 32 Bit Flight Controller Autopilot - dengan 4G SD RC Quadcopter Ardupilot ArduPlane ArduRover
Harga biasa Daripada $130.31 USDHarga biasaHarga seunit per -
Hobbywing XRotor F7 FC + 65A 30x30mm 4-dalam-1 ESC FPV Stack Combo, AM32, DJI Plug & Play
Harga biasa Daripada $69.00 USDHarga biasaHarga seunit per -
RadioLink F405 Pengawal Penerbangan – 32-bit STM32F405, 6 Saluran Output, OSD Terbina, Serasi ArduPilot/Betaflight/INAV
Harga biasa Daripada $39.00 USDHarga biasaHarga seunit per -
Foxeer F722 V4 Pengawal Penerbangan X8 DJI Type-C
Harga biasa $62.00 USDHarga biasaHarga seunit per -
Foxeer F722 V4 MPU6000 FC 8S Dual BEC Barometer X8 Pengawal Penerbangan
Harga biasa $85.00 USDHarga biasaHarga seunit per -
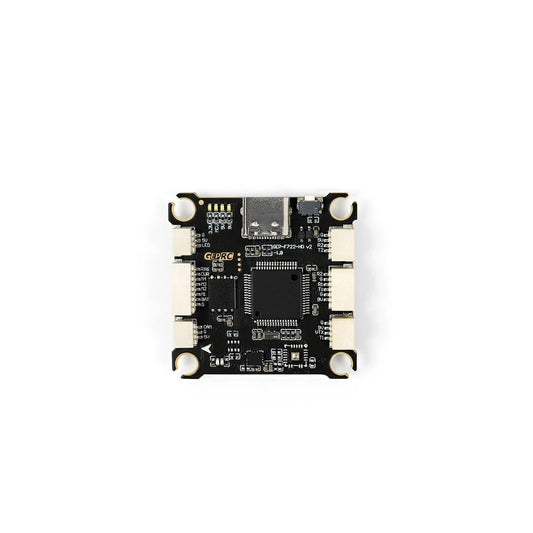
GEPRC GEP-F722-HD V2 Pengawal Penerbangan 3-6S LiPo 16M Kotak Hitam Sistem ICM42688-P RC FPV Racing Dron Aksesori Quadcopter
Harga biasa Daripada $53.00 USDHarga biasaHarga seunit per -
T-motor F7 HD Stack F7 HD Flight Controller untuk + F55A Pro II ESC Untuk FPV RC Drone Freestyle Racing Quadcopter
Harga biasa Daripada $75.00 USDHarga biasaHarga seunit per -
CUAV X25 EVO Pengawal Penerbangan Autopilot - STM32H7, Tiga IMU, Dwi Baro, RM3100, CAN, 16 PWM, PX4/ArduPilot
Harga biasa Daripada $446.00 USDHarga biasaHarga seunit per -
GEPRC TAKER F745 BT 60A Flight Controller Stack – Dual Gyro, 512MB Blackbox, Bluetooth, 8-Keluaran Motor
Harga biasa $112.00 USDHarga biasaHarga seunit per -

Foxeer F405 V2 (Palam) Pengawal Penerbangan + Reaper 55A ESC 8S Stack Video Switcher Servo Borameter
Harga biasa Daripada $65.00 USDHarga biasaHarga seunit per -
Pixhawk PX4 PIX 2.4.8 32 Bit Flight Controller+RGB+OLED+Safety Switch+Buzzer+PPM+I2C+ 4G SD
Harga biasa Daripada $132.28 USDHarga biasaHarga seunit per -
Pixhawk 2.4.8 PX4 PIX 32 Bit Flight Controller - M8N GPS / Modul Telemetri Wifi / Suis Keselamatan Buzzer RGB I2C 4G SD OSD / OLED
Harga biasa Daripada $10.96 USDHarga biasaHarga seunit per -
APM2.8 APM 2.8 pengawal penerbangan Ardupilot +M8N GPS terbina dalam kompas +diri gps+penyerap kejutan untuk RC Quadcopter Multicopter
Harga biasa Daripada $104.90 USDHarga biasaHarga seunit per -
CUAV BARU X7+ Pengawal Penerbangan NEO 3 Pro GPS Pixhawk Sumber Terbuka PX4 ArduPilot GNSS FPV RC Drone VTOL Quadcopter Combo
Harga biasa Daripada $407.11 USDHarga biasaHarga seunit per -
Kawalan Penerbangan JIYI K++ - Dwi CPU radar pengelakan halangan pilihan Dron pertanian khas
Harga biasa Daripada $49.27 USDHarga biasaHarga seunit per -
Sistem Matek H743 / MINI H743 Pengawal Penerbangan - STM32H743VIT6 ICM20602 OSD DPS310 PDB terbina dalam untuk Bahagian Dron Lumba RC FPV
Harga biasa $116.02 USDHarga biasaHarga seunit per -
BaseCam Simplebgc 32 Bit Extended Brushless Gimbal Controller Versi 3.6 dengan pengekod untuk Kamera BMCC 5D2 5D3
Harga biasa $312.17 USDHarga biasaHarga seunit per -
GEPRC TAKER H743 BT 32Bit 65A Stack - STM32H743, Dwi Giroskop, Penalaan Bluetooth, 512M Kotak Hitam
Harga biasa Daripada $94.00 USDHarga biasaHarga seunit per -
CUAV X25 EVO Pixhawk Autopilot Flight Controller – Serasi PX4 / ArduPilot, Teras Sistem UAV Generasi Baharu
Harga biasa Daripada $446.00 USDHarga biasaHarga seunit per -
GEPRC TAKER F722 BLS 80A V2 Stack – STM32F722 FC + 80A 4in1 ESC untuk Dron FPV Berprestasi Tinggi 3–6S
Harga biasa $155.00 USDHarga biasaHarga seunit per