






Pengawal Drone CUAV Pixhawk V6X V2 untuk PX4 ArduPilot, STM32H753IIK6, RM3100, Ethernet 100Mbps
Pengawal Drone CUAV Pixhawk V6X V2 untuk PX4 ArduPilot, STM32H753IIK6, RM3100, Ethernet 100Mbps
CUAV
Tidak dapat memuatkan ketersediaan pengambilan
Tinjauan
CUAV Pixhawk V6X V2 adalah pengawal drone siri Pixhawk yang direka untuk firmware autopilot PX4 dan ArduPilot. Ia mengikuti standard dan falsafah reka bentuk modular Pixhawk FMU v6x, menampilkan pengesanan redundan gred industri yang ditingkatkan, jam luar suhu tetap dan reka bentuk pengaliran haba MCU, penukaran tahap PWM 5V/3.3V, dan struktur penyerapan kejutan yang dipatenkan. Modul pengurusan kuasa PMU 2 Lite standard menyokong 70V input dan 220A pengesanan arus.
Ciri Utama
- Unit titik terapung berganda ketepatan H7 (STM32H753IIK6); unit titik terapung ketepatan berganda 480MHz; 2M memori Flash
- Matriks IMU tiga kali ganda redundan yang tidak serupa dengan reka bentuk bas dan bekalan kuasa yang bebas (IIM-42652, BMI088, ICM-45686)
- Barometer redundan berganda yang digabungkan (BMP581, ICP-20100)
- Sistem penyerapan kejutan teras dengan penyerapan kejutan tiga paksi (X, Y, Z); reka bentuk sokongan empat sudut yang condong; jenis bahan penyerapan kejutan yang baru
- Kompas magnet RM3100 gred automotif untuk penolakan gangguan magnet yang kukuh
- Kompenasi jam kristal luaran IMU (digunakan dengan jam luaran suhu tetap ketepatan tinggi untuk mengurangkan ralat ODR dan meningkatkan kepekaan serta penyelarasan)
- Sistem kawalan suhu tetap: silikon konduktif terma dan kompensasi suhu IMU untuk mengurangkan pengaliran berkaitan suhu
- Perisian fleksibel yang bertukar antara 5V dan 3.3V PWM tahap output
- Antara muka Ethernet 100 Mbps terintegrasi untuk penyelarasan data berkelajuan tinggi dengan peranti seperti komputer misi dan kamera pengukuran
- Menyokong boot selamat dan perkhidmatan kemas kini firmware selamat
- Reka bentuk bekalan kuasa pelbagai redundan; menyokong input PMU CAN 2 saluran; termasuk PMU 2 Lite sebagai standard
- Lubang pemasangan bawah ditambah untuk pemasangan skru secara langsung; lubang pemasangan serasi dengan skru standard M2
Spesifikasi
| Pemproses | STM32H753IIK6 |
| Koprosesor | STM32F103 |
| Versi | Pixhawk V6XV2 |
| CPU / memori (dinyatakan) | Unit titik terapung ketepatan berganda 480MHz; 2M memori Flash |
| Accelerometer & giroskop | IIM-42652; BMI088; ICM-45686 |
| Kompas | RM3100 |
| Barometer | BMP581; ICP-20100 |
| PWM I/O | 16 |
| Tahap PWM | 3.3V / 5V (pertukaran perisian) |
| Kuasa | 2 (2 antara muka kuasa CAN) |
| Pintu GPS | 2 (GPS1: antara muka GPS dengan I2C dan suis keselamatan; GPS2: antara muka dengan I2C dan GPS) |
| Pintu TELEM | 3 |
| Bas CAN | 2 |
| PPM RC | 1 (input khusus untuk penerima PPM) |
| SBUS/DSM/RSSI | 2 (1 input SBUS/DSM/Spektrum; 1 analog 3.3V/PWM input) |
| Keluar SBUS | 1 |
| Penyahpepijatan FMU | 1 |
| Penyahpepijatan IO | 1 |
| Ethernet | 1 (100 Mbps) |
| SPI luaran 1 | 1 (antaramuka SP16 untuk pengembangan sensor luaran) |
| ADIO | 1 (AD3.3/ADC6.6) |
| UART4 | 1 |
| Port USB | 2 (Type-C x1; antaramuka GH x1 untuk sambungan USB luaran) |
| Kad TF | 1 |
| Modul kuasa | PMU 2 Lite Standard (versi 5V), voltan input: 12-70V |
| Voltan operasi | USB: 4.75-5.25V; PMU 2 Lite: 12-70V; Kuasa: 4.85-5.45V |
| Suasana operasi | -20 hingga 85C |
| Saiz | 45 x 85.1 x 29.2 mm |
| Berat | Pengawal: 97.9g; Teras: 43.1g; Papan pembawa (termasuk skru): 54.8g |
| Nota pemasangan (teks rajah) | Lubang pemasangan serasi dengan skru standard M2; dimensi ditunjukkan: 72 mm; 22.50 mm; 24 mm |
Apa yang Termasuk
- Pixhawk V6X V2 x1
- Modul Kuasa CAN PMU 2 Lite 5V x1
- Kabel Kuasa Header PMU 2 Lite-5V (Versi X7+ (V6X)), panjang wayar: 25cm x1
- Papan Sambungan CAN/I2C x1
- Kad Memori TF x1
- Kabel Type-C, panjang wayar: 100cm x1
- Kabel DSM RC, panjang wayar: 30cm x1
- Kabel SBUS RC, panjang wayar: 30cm x1
- Kabel PPM RC/SBUS OUT, panjang wayar: 30cm x1
- Kabel Ethernet, panjang wayar: 40cm x1
- Kabel CAN, panjang wayar: 30cm x1
- Kabel TELEM, panjang wayar: 30cm x1
- Kabel UART 4, panjang wayar: 30cm x1
- Kabel UART4 -> Kabel I2C, panjang wayar: 30cm x1
- Kabel ADIO, panjang wayar: 30cm x1
- Kabel Debug, panjang wayar: 10cm x1
- Kabel Sambungan USB -> Type-C Female, panjang wayar: 50cm x1
- 3M Dua Sisi x2
Aplikasi
- Serasi dengan ArduPilot dan PX4
- Menyokong multi-rotor, sayap tetap, VTOL sayap tetap, helikopter tanpa pemandu, kenderaan tanpa pemandu, dan kapal tanpa pemandu (submersible)
- Penyelarasan data Ethernet berkelajuan tinggi dengan komputer misi dan peranti lain di atas kapal yang disokong
Untuk pemeriksaan keserasian dan soalan persediaan, hubungi [email protected] atau lawati https://rcdrone.top/.
Video
Butiran

Pengawal penerbangan Pixhawk V6X V2 menggunakan pemproses H7 dan mempunyai IMU tiga redundan, barometer dwi, dan kompas RM3100 dengan reka bentuk penyerapan kejutan.

Pixhawk V6X V2 menggunakan pemproses STM32H753IIK6 H7 untuk menyokong persediaan kawalan penerbangan berasaskan PX4 dan ArduPilot.

Pixhawk V6X V2 menggunakan mount penyerapan kejutan tiga paksi (X, Y, Z) dengan empat sokongan sudut yang condong untuk membantu mengurangkan getaran dan bunyi.
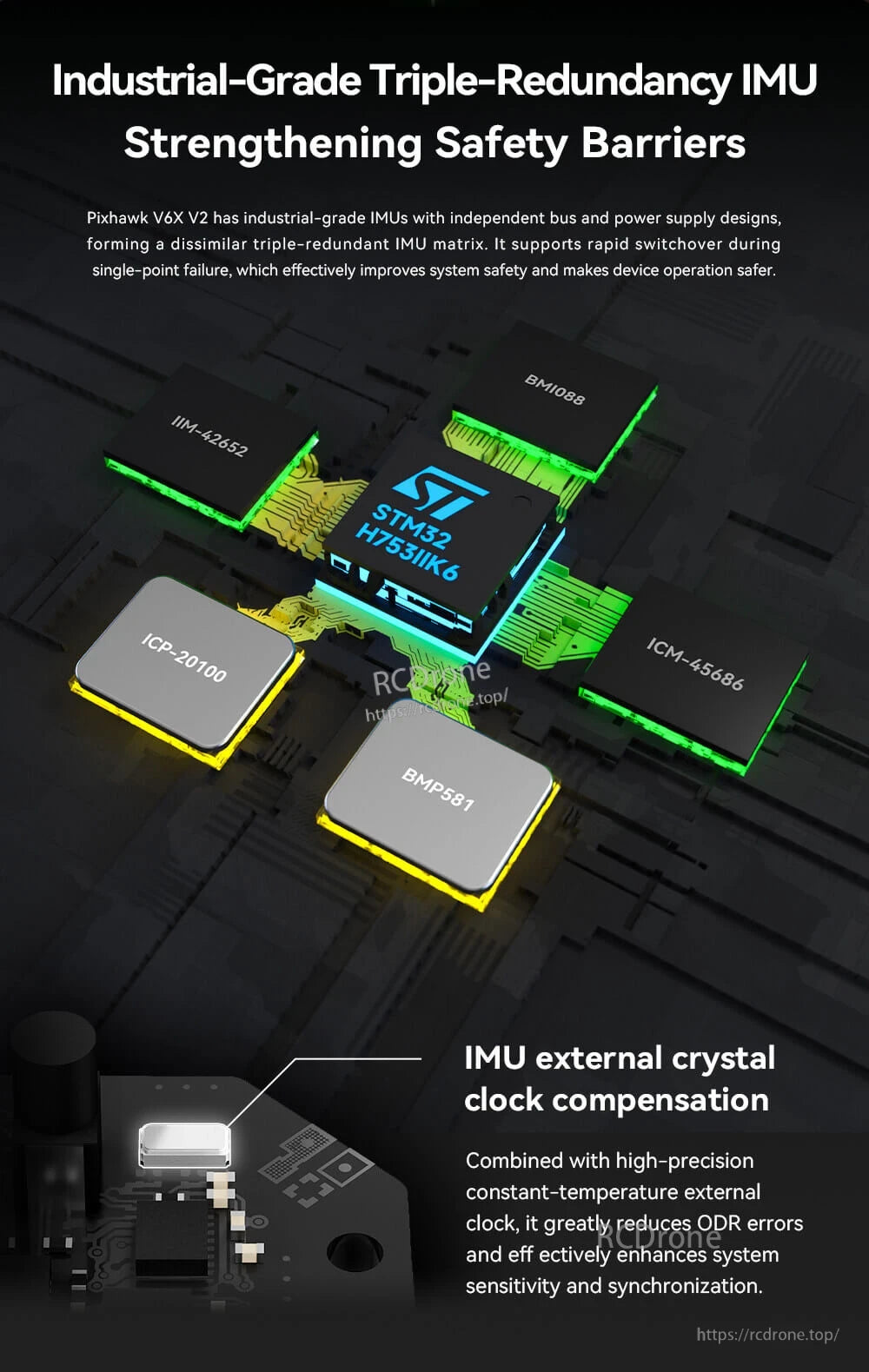
Reka bentuk pengawal penerbangan Pixhawk V6X V2 mempunyai persediaan IMU tiga redundan di sekitar STM32H753IIK6, ditambah dengan kompensasi jam kristal luaran untuk penjadualan sensor.

Pixhawk V6X V2 mengintegrasikan magnetometer RM3100 gred automotif dan menyokong penentuan arah GPS untuk orientasi dan navigasi yang lebih stabil.
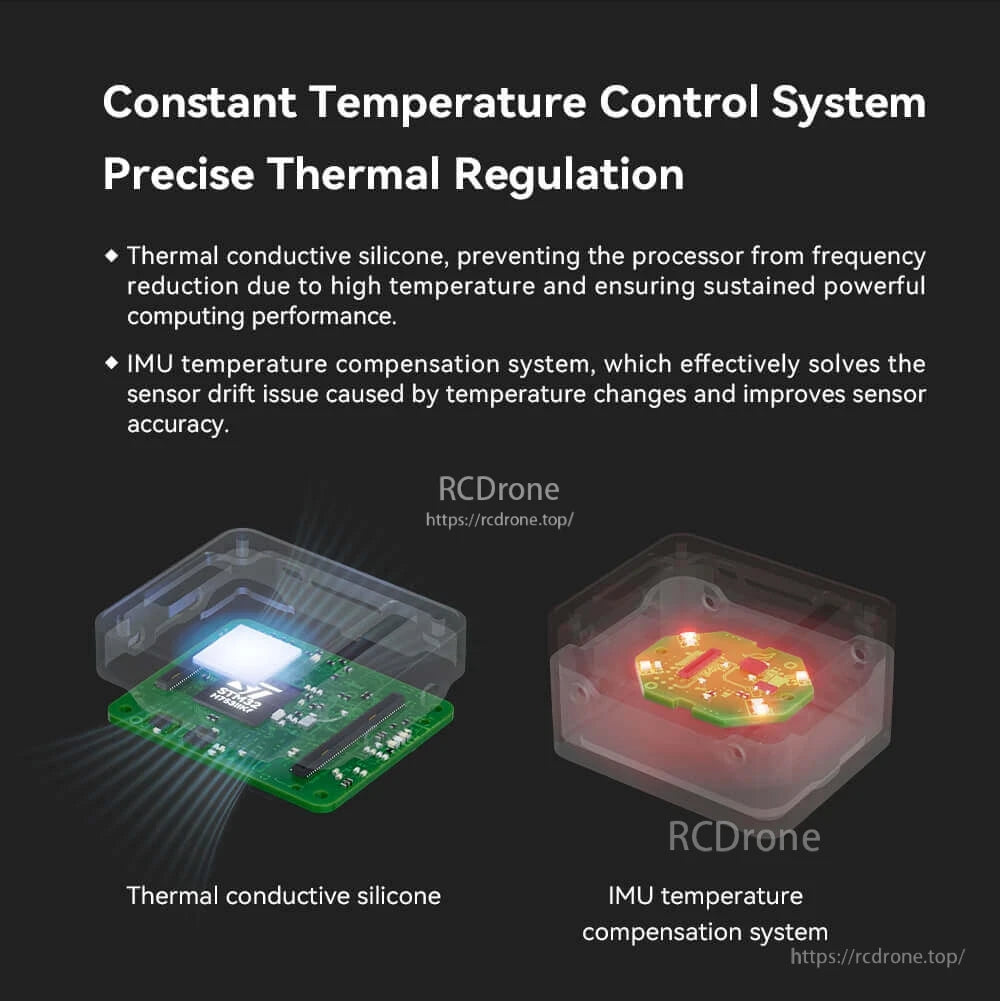
Sistem kawalan suhu tetap menggunakan silikon konduktif terma dan pampasan suhu IMU untuk mengurangkan drift berkaitan suhu.
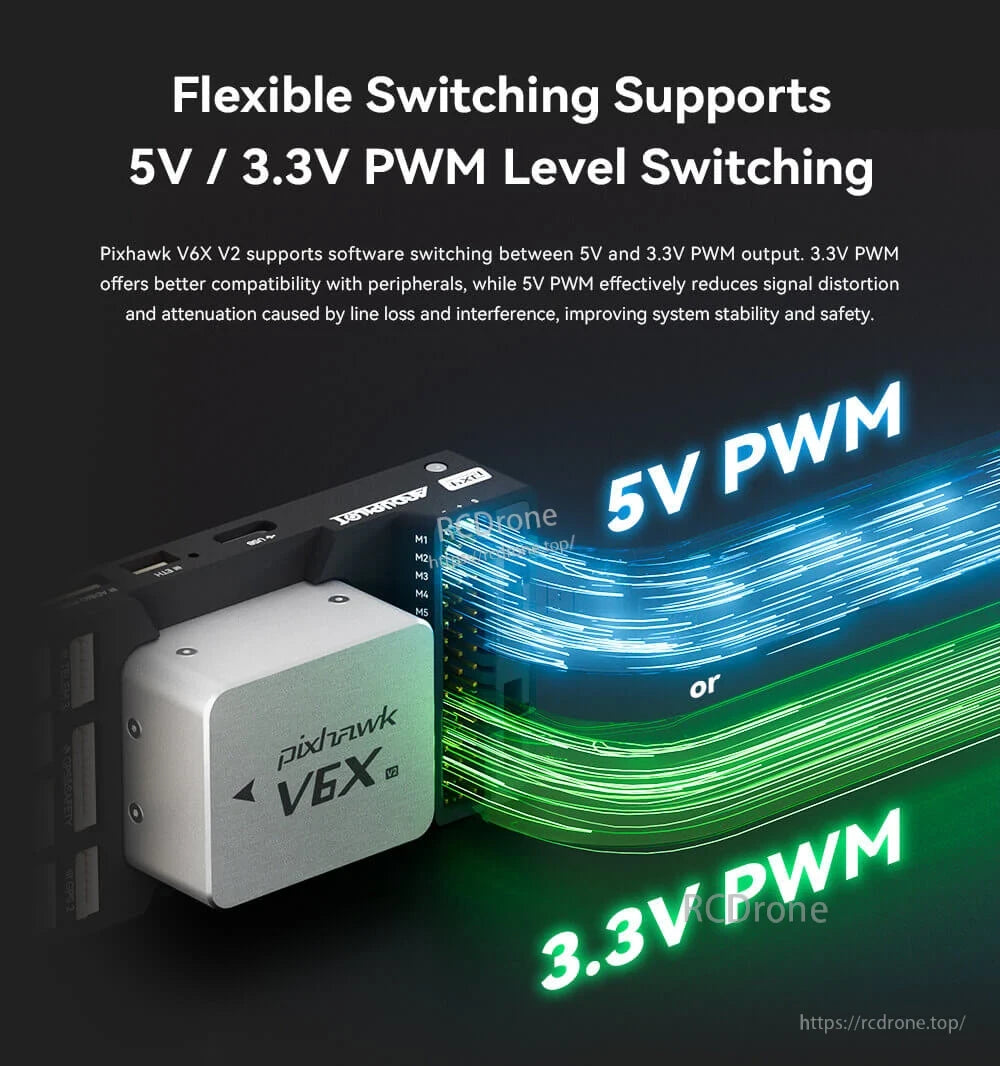
Pixhawk V6X V2 menyokong penukaran fleksibel antara tahap output PWM 5V dan 3.3V untuk keserasian yang lebih mudah dengan pelbagai periferal.

Pixhawk V6X V2 mengintegrasikan antara muka Ethernet 100 Mbps bersama dengan port yang dilabel seperti USB, TELEM3, CAN, dan GPS & Keselamatan untuk pengkabelan yang bersih.
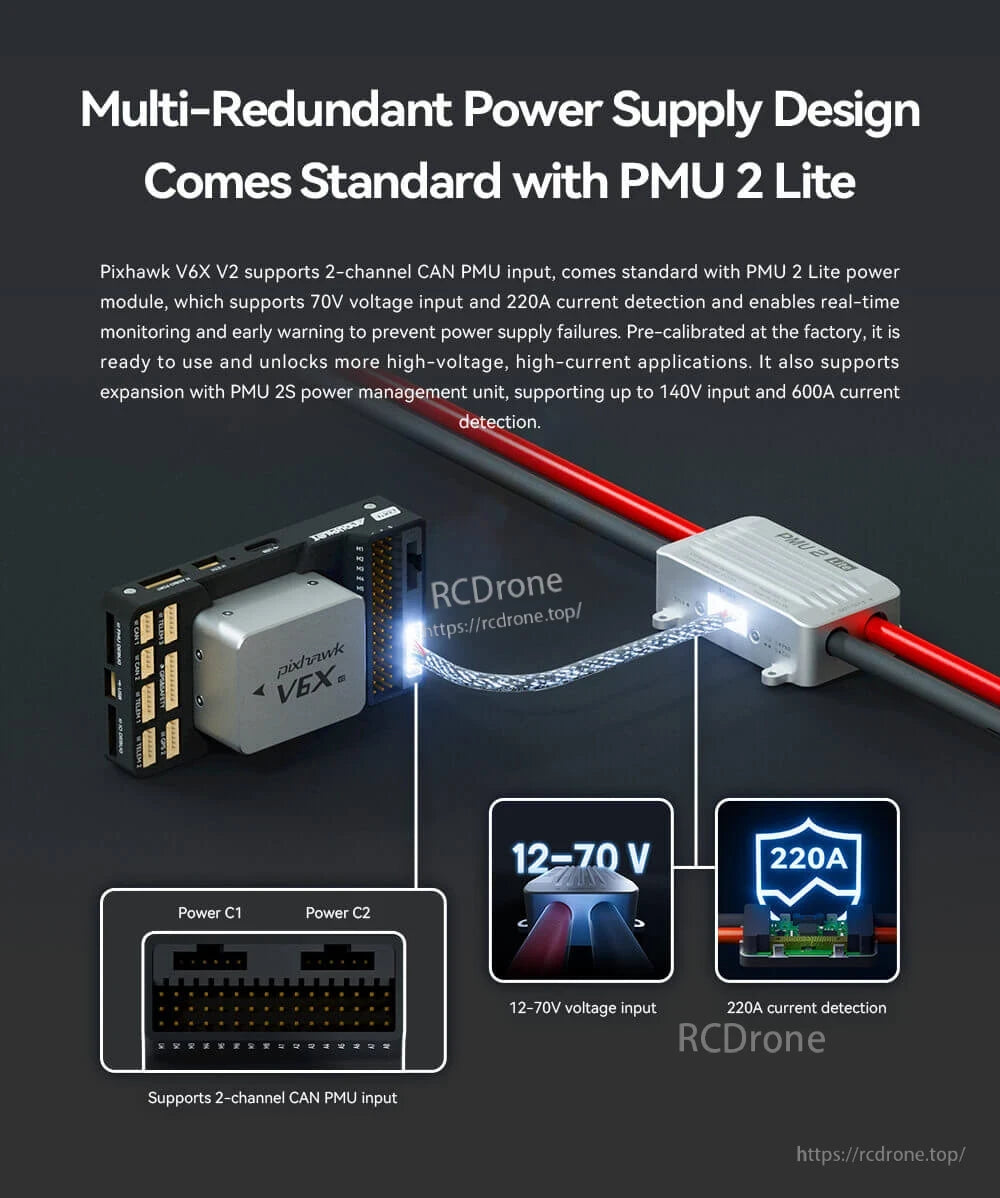
Pixhawk V6X V2 dipasangkan dengan modul PMU 2 Lite untuk input kuasa pelbagai redundan, menyokong pengesanan arus 12–70V dan 220A.

CUAV Pixhawk V6X V2 menggunakan modul teras modular yang boleh ditanggalkan pada papan pembawa untuk memudahkan penyesuaian dan akses penyambung.
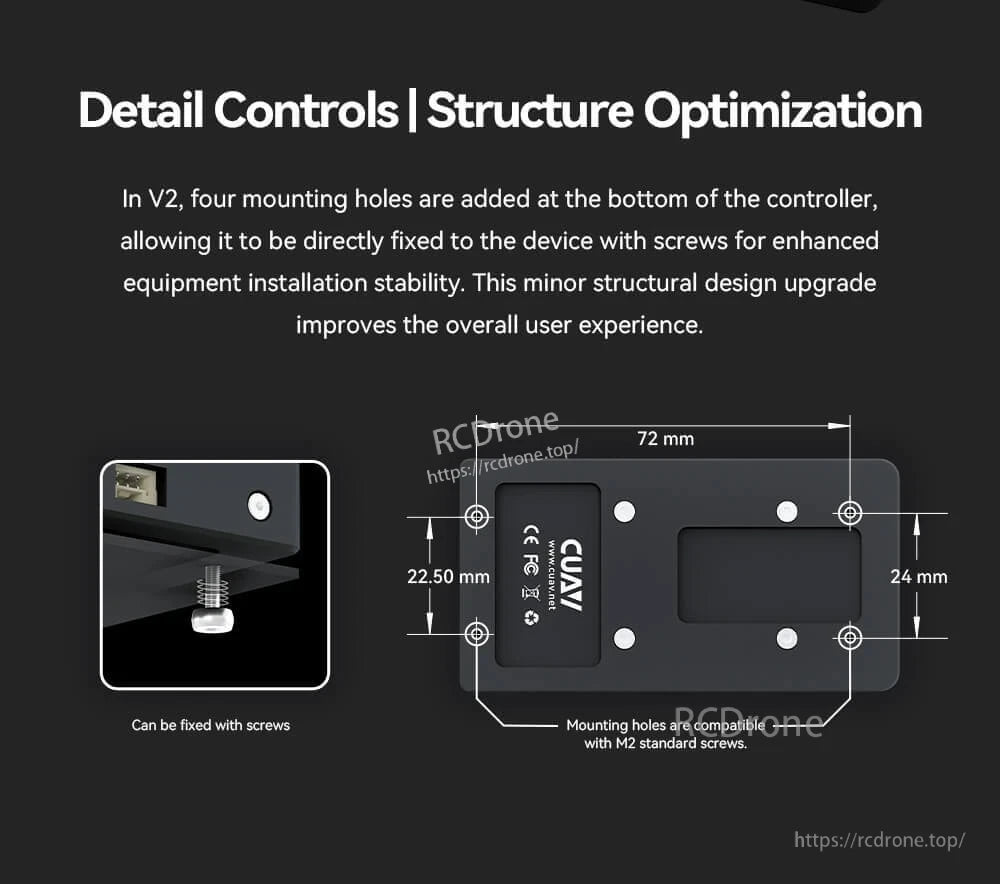
CUAV Pixhawk V6X V2 menambah empat lubang pemasangan bawah yang serasi M2 dengan jejak 72 mm untuk pemasangan skru yang lebih selamat.

Pixhawk V6X V2 menyokong firmware ArduPilot dan PX4 untuk pelbagai platform tanpa pemandu termasuk multirotor, pesawat sayap tetap, dan kenderaan darat atau marin.
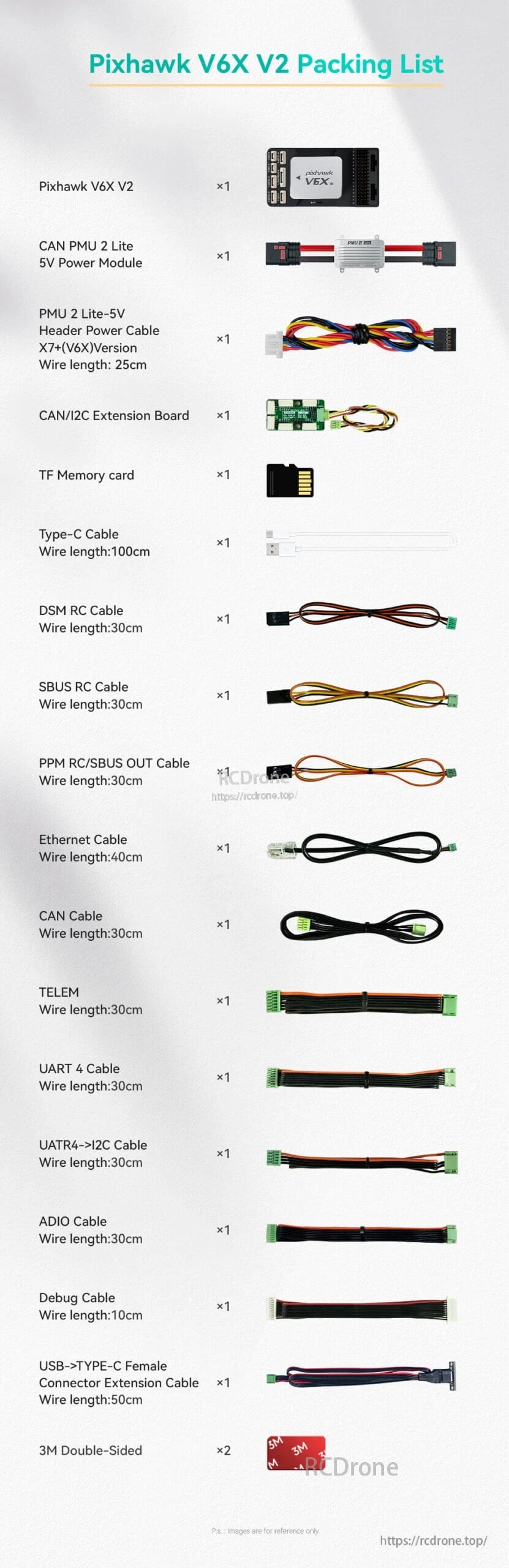
Kit Pixhawk V6X V2 termasuk pengawal penerbangan, modul kuasa CAN PMU 2 Lite 5V, kad memori TF, dan satu set kabel Type‑C, RC, Ethernet, CAN, TELEM, UART, ADIO, dan debug.
Related Collections


















