






CubeMars AK10-9 V2.0 Penggerak Robotik KV60/KV100 | 18Nm/15Nm Tork Dinilai, Dwi Pengekod, Mod MIT & Servo
CubeMars AK10-9 V2.0 Penggerak Robotik KV60/KV100 | 18Nm/15Nm Tork Dinilai, Dwi Pengekod, Mod MIT & Servo
CubeMars
Tidak dapat memuatkan ketersediaan pengambilan
Gambaran Keseluruhan
The CubeMars AK10-9 V2.0 adalah penggerak robotik yang sangat terintegrasi yang menggabungkan motor BLDC berprestasi tinggi, pengurang planet, dua pengod encoders, dan pemacu terintegrasi ke dalam satu unit kompak. Menyokong kedua-dua mod kuasa MIT dan mod kawalan servo industri, ia memberikan keluaran tork yang lancar, penentuan kedudukan yang tepat, dan respons yang pantas, menjadikannya ideal untuk robot berkaki, exoskeleton, dan AGV. Tersedia dalam varian KV60 dan KV100, ia menawarkan sehingga 48Nm tork puncak, dengan pengaliran haba yang dioptimumkan dan pemantauan suhu masa nyata untuk kebolehpercayaan jangka panjang.
Ciri Utama
-
Mod Kawalan Dwi: Menyokong pertukaran tanpa henti antara mod kuasa MIT dan mod kawalan servo untuk kawalan gerakan yang fleksibel.
-
Keluaran Tork Tinggi: Sehingga 48Nm tork puncak dengan operasi stabil dan backlash rendah (0.33°).
-
Terintegrasi Tinggi: Menggabungkan motor, pengod, pemacu, dan pengurang planet dalam satu bentuk kompak.
-
Keluaran & Pengod Dalam: Pengod magnet 14-bit dalam dan 15-bit luar yang terintegrasi memastikan maklum balas yang tepat.
-
Galas Roller Bersilang: Meningkatkan rintangan beban aksial dan radial, meningkatkan kebolehpercayaan dalam aplikasi dinamik.
-
Sensor Suhu Dalam: Pemantauan suhu masa nyata mencegah kerosakan motor di bawah tekanan terma.
-
Pelepasan Panas yang Dioptimumkan: Reka bentuk struktur unik meningkatkan pengurusan terma, memastikan operasi jangka panjang yang stabil.
-
Operasi Senyap: Tahap bunyi serendah 65 dB pada 65cm (versi KV60).
Spesifikasi
Spesifikasi AK10-9 V2.0 K60
| Permohonan | Robot Berkaki, Exoskeleton, AGV | Tork puncak (Nm) | 48 |
| Kaedah pemanduan | FOC | Arus puncak (ADC) | 29.8 |
| Suasana suhu operasi | -20℃~50℃ | Kv (rpm/V) | 60 |
| Jenis penggulungan | bintang | Kt (Nm/A) | 0.198 |
| Kelas penebat | C | Ke (V/krpm) | 17.2 |
| Penebat Volt tinggi | 1000V 5mA/2s | Rintangan Fasa ke Fasa (mΩ) | 195 |
| Rintangan penebat | 1000V 10MΩ | Induktans Fasa ke Fasa (μH) | 181 |
| Fasa | 3 | Inersia (gcm²) | 1002 |
| Pasangan kutub | 21 | Km (Nm/√W) | 0.45 |
| Nisbah pengurangan | 9:1 | Konstanta masa mekanikal (ms) | 0.5 |
| Pemanduan belakang (Nm) | 0.8 | Konstanta masa elektrik (ms) | 0.93 |
| Backlash (°) | 0.33 | Berat (g) | 960 |
| Sensor suhu | NTC MF51B 103F3950 | Peratusan berat tork maksimum (Nm/kg) | 50 |
| Kebisingan dB 65CM dari motor | 65 | Penyambung CAN | A1257WR-S-4P |
| Penarafan beban asas (dyn. C ) N | 2000 | Penyesuai UART | A1257WR-S-3P |
| Penarafan beban asas (stat.C0) N | 2520 | Penyesuai kuasa | XT30PW-M |
| Voltan yang dinilai (V) | 24/48 | Jenis pengodak gelung dalam | Pengodak magnet |
| Tork yang dinilai (Nm) | 18 | Resolusi pengodak cincin dalam | 14bit |
| Kelajuan yang dinilai (rpm) | 109/228 | Jenis pengodak cincin luar | Pengodak magnet |
| Arus yang dinilai (ADC) | 10.6 | Resolusi pengodak cincin luar | 15bit |
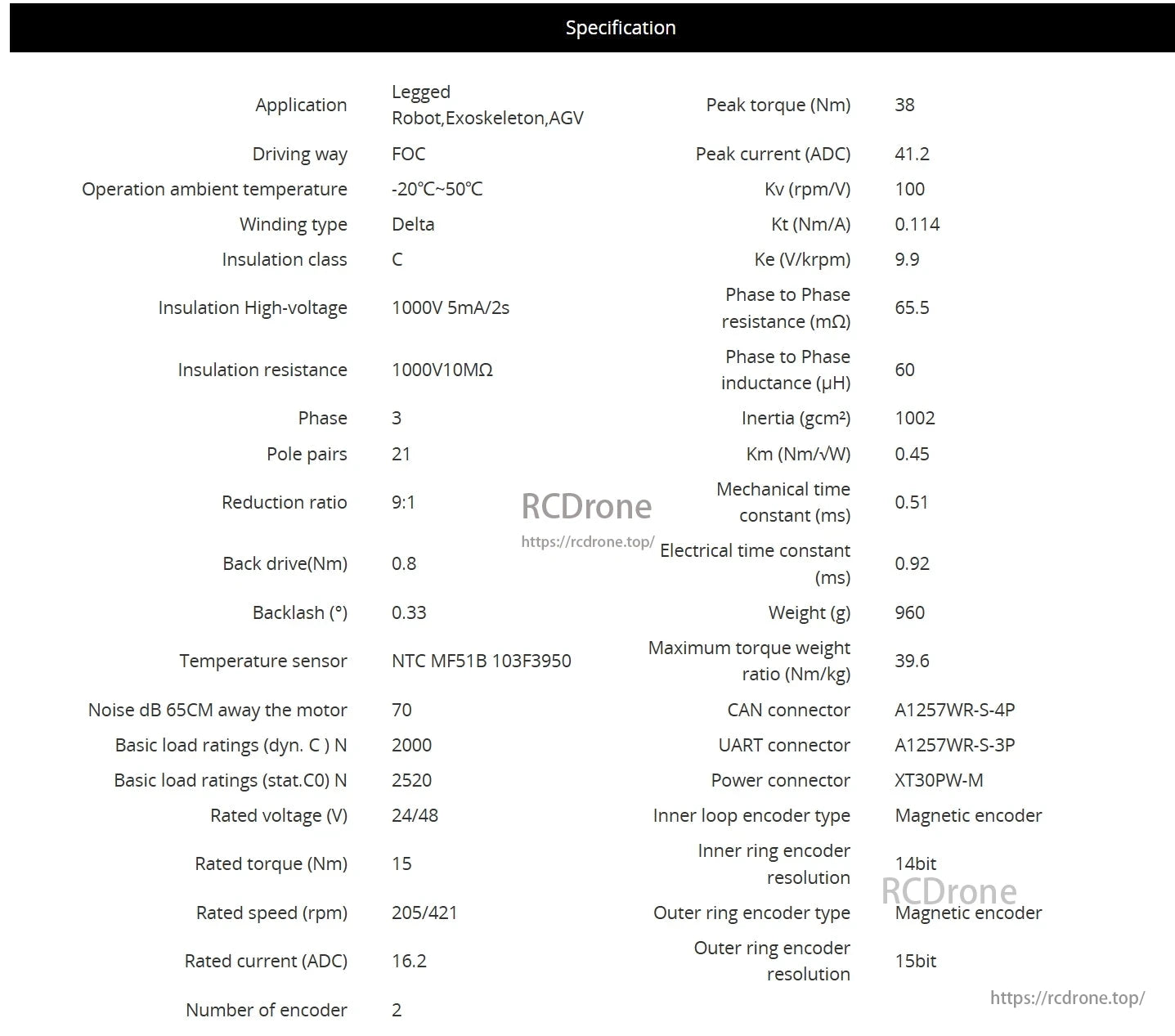
AK10-9 V2.0 KV100 Spesifikasi
| Permohonan | Robot Berkaki, Exoskeleton, AGV | Tork puncak (Nm) | 38 |
| Jalan pemanduan | FOC | Arus puncak (ADC) | 41.2 |
| Suasana suhu operasi | -20℃~50℃ | Kv (rpm/V) | 100 |
| Jenis penggulungan | Delta | Kt (Nm/A) | 0.114 |
| Kelas penebat | C | Ke (V/krpm) | 9.9 |
| Penebat Voltan Tinggi | 1000V 5mA/2s | Rintangan Fasa ke Fasa (mΩ) | 65.5 |
| Rintangan penebat | 1000V10MΩ | Induktans fasa ke fasa (μH) | 60 |
| Fasa | 3 | Inersia (gcm²) | 1002 |
| Pasangan tiang | 21 | Km (Nm/√W) | 0.45 |
| Nisbah pengurangan | 9:1 | Konstanta masa mekanikal (ms) | 0.51 |
| Pemanduan belakang (Nm) | 0.8 | Konstanta masa elektrik (ms) | 0.92 |
| Belakang (°) | 0.33 | Berat (g) | 960 |
| Sensor suhu | NTC MF51B 103F3950 | Nisbah berat tork maksimum (Nm/kg) | 39.6 |
| Helaian bunyi dB 65CM dari motor | 70 | Penyambung CAN | A1257WR-S-4P |
| Penarafan beban asas (dyn. C) N | 2000 | Penyambung UART | A1257WR-S-3P |
| Penarafan beban asas (stat.C0) N | 2520 | Penyambung kuasa | XT30PW-M |
| Voltan yang dinilai (V) | 24/48 | Jenis pengodok gelung dalam | Pengodok magnet |
| Tork yang dinilai (Nm) | 15 | Resolusi pengodok cincin dalam | 14bit |
| Kelajuan yang dinilai (rpm) | 205/421 | Jenis pengodok cincin luar | Pengodok magnet |
| Arus yang dinilai (ADC) | 16.2 | Resolusi pengodak cincin luar | 15bit |
| Bilangan pengodak | 2 |
Aplikasi
-
Robot Berkaki Bionik
-
Exoskeleton untuk Pemulihan atau Menanggung Beban
-
Kenderaan Tanah Autonomi (AGV)
-
Sistem Kawalan Tork Sendi
-
Robotik Humanoid dan Quadruped
Muat Turun
![]() Manual Pemandu dan Kawalan Siri AK v1.0.15.X.pdf
Manual Pemandu dan Kawalan Siri AK v1.0.15.X.pdf
Butiran
Penggerak Robotik CubeMars AK10: 38 Nm tork puncak, 41.2 ADC puncak arus, -20°C hingga 50°C operasi, 9:1 nisbah pengurangan, 960g berat, 39.6 Nm/kg nisbah tork-berat maksimum, 70 dB bunyi, pengodok magnet, penyambung CAN dan UART.

CubeMars AK10 Penggerak Robotik: 48 Nm tork puncak, 29.8 A puncak arus, -20°C hingga 50°C operasi, 1000V penebat, 3 fasa, 21 pasang tiang, 9:1 nisbah pengurangan, 960g berat, 50 Nm/kg nisbah tork berat maksimum, pengodok magnet.

Graf Analisis untuk CubeMars AK10-9 V2.0 KV60@48VDC actuator. Memaparkan kuasa output (W), kecekapan, arus (A), dan kelajuan (RPM) berbanding tork (N.m). Kecekapan memuncak sekitar 12 N.m, sementara kuasa output meningkat secara berterusan dengan tork. Arus meningkat secara linear, dan kelajuan menurun apabila tork meningkat. Graf ini menonjolkan ciri prestasi penggerak, menunjukkan kemampuannya di bawah beban yang berbeza.Metrik utama termasuk kuasa output maksimum melebihi 800 W dan kelajuan operasi sehingga 350 RPM pada tork rendah. Data ini membantu dalam memahami kecekapan dan dinamik kuasa penggerak merentasi pelbagai aplikasi.
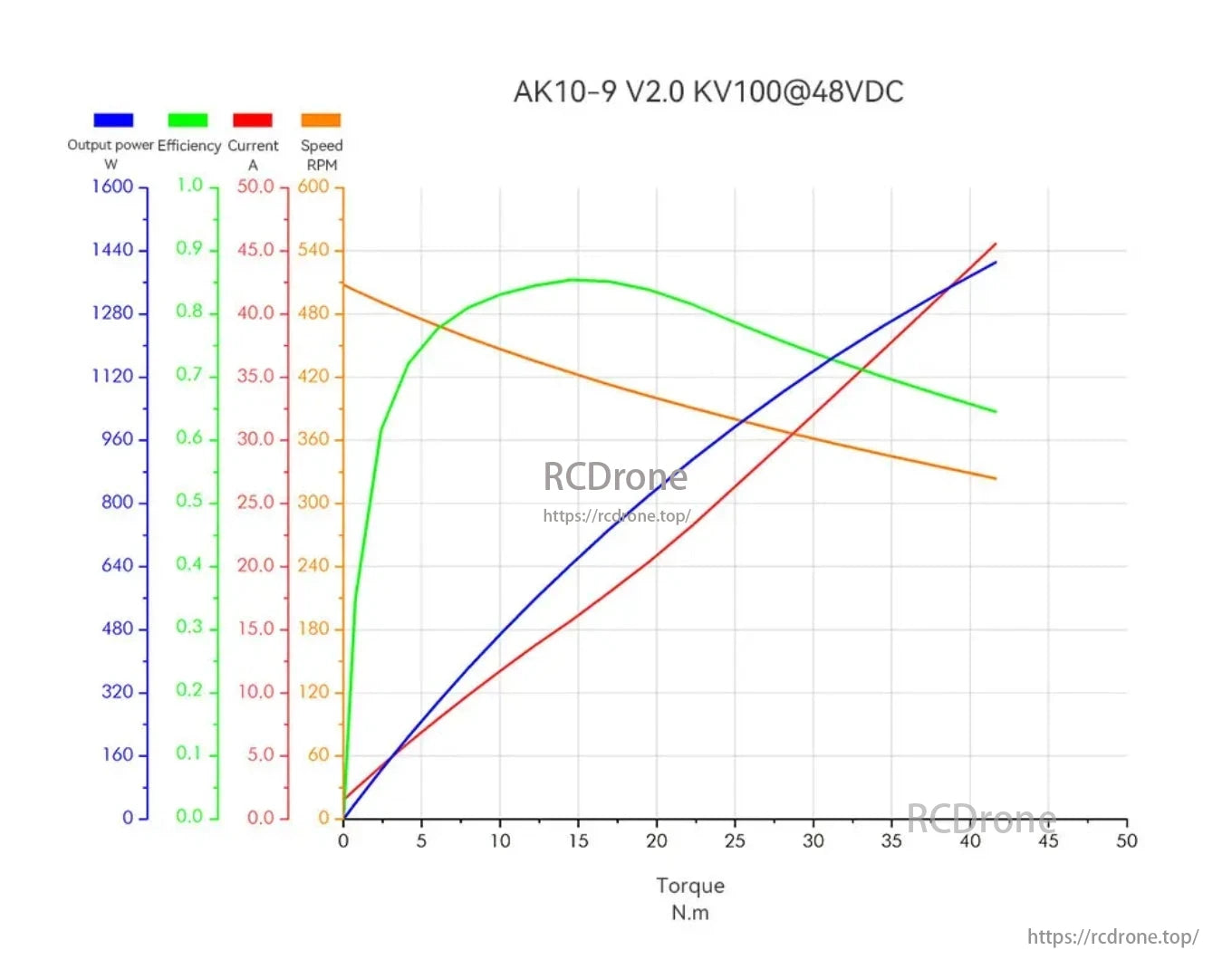
Prestasi penggerak CubeMars AK10-9 V2.0 KV100@48VDC actuditunjukkan. Kuasa output (W), kecekapan, arus (A), dan kelajuan (RPM) dipetakan terhadap tork (N.m). Kecekapan mencapai puncaknya sekitar 15 N.m, manakala kuasa output meningkat secara linear dengan tork. Arus juga meningkat secara beransur-ansur dengan tork. Kelajuan menurun apabila tork meningkat, bermula pada kira-kira 480 RPM pada tork sifar. Graf ini menggambarkan titik operasi optimum untuk pelbagai aplikasi, menonjolkan keupayaan penggerak di bawah pelbagai keadaan beban. Data ini membantu dalam memilih tetapan yang sesuai untuk tugas tertentu.

Servo kuasa terintegrasi CubeMars AK10-9 KV60, mod termasuk. Penggerak robotik dengan FCC, CE, RoHS V2.0 pensijilan.

Penggerak Robotik menawarkan kawalan motor yang efisien, mod kuasa yang tepat, dan respons yang lebih cepat untuk aplikasi industri.

Penggerak Robotik CubeMars AK10 termasuk motor BLDC berprestasi tinggi, galas roller silang gred industri, sensor suhu, pengod encoder output, mod kawalan dwi, dan pengurang planetari untuk tork yang stabil.

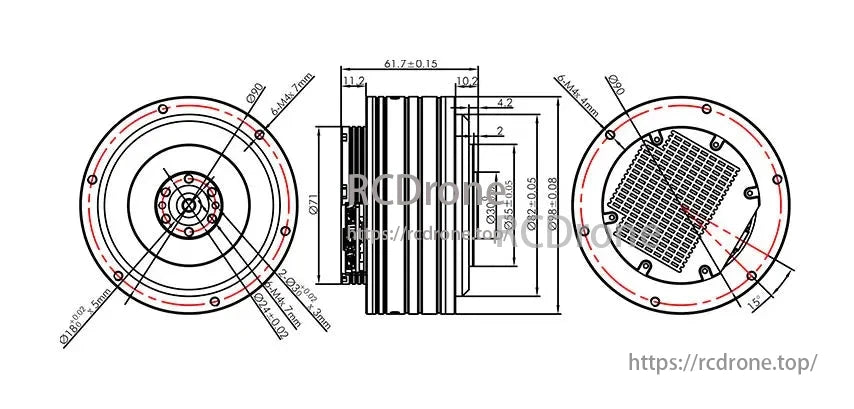
Optimumkan struktur dan radiasi haba dengan cepat. Tingkatkan penyejukan cangkerang motor untuk ketahanan dan kestabilan prestasi modul pemacu. SN: 1010921081.
Related Collections






