





CubeMars R80 KV110 Motor 48V 3-Fasa FOC dengan Sensor Hall, Pemacu Exoskeleton & Robotik
CubeMars R80 KV110 Motor 48V 3-Fasa FOC dengan Sensor Hall, Pemacu Exoskeleton & Robotik
CubeMars
Tidak dapat memuatkan ketersediaan pengambilan
Tinjauan
Motor CubeMars R80 KV110 adalah motor 3-fasa yang ditujukan untuk aplikasi pemacu eksoskeleton dan robotik, dengan sensor Hall terintegrasi dan sokongan untuk FOC (pengawalan berorientasikan medan). Ia mempunyai reka bentuk pengaliran haba yang khas dan antara muka gaya penyambung untuk memudahkan pemasangan.
Ciri Utama
- Sensors Hall terintegrasi
- Deviasi ketepatan sudut elektrik: ±10°
- Reka bentuk penyejukan khas (asas ultra-ringan & pad silikon dengan konduktiviti terma tinggi; panjang keseluruhan dikurangkan untuk meningkatkan penyejukan)
- Reka bentuk lubang corak pada loceng untuk pemasangan gearbox (gearbox harmonik, flang, atau jenis gearbox lain)
- Reka bentuk penyambung untuk pemasangan yang lebih mudah (menggantikan wayar tradisional)
- Graf operasi motor analitik disediakan (kelajuan vs tork pada 48V; zon operasi tidak berfungsi / operasi jangka pendek / operasi berterusan)
Spesifikasi
| Aplikasi | Exoskeleton |
| Kaedah pemanduan | FOC |
| Suasana suhu operasi | -20℃~50℃ |
| Jenis penggulungan | delta |
| Kelas penebat | H |
| Penebat Voltan Tinggi | 1000V 5mA/2s |
| Rintangan penebat | 1000V10MΩ |
| Fasa | 3 |
| Pasangan tiang | 21 |
| Voltan yang dinilai (V) | 48 |
| Kelajuan tanpa beban (rpm) | 4320 |
| Torque yang dinilai (Nm) | 1.3 |
| Kelajuan yang dinilai (rpm) | 3580 |
| Arus yang dinilai (ADC) | 12.3 |
| Tork puncak (Nm) | 4 |
| Arus puncak (ADC) | 38.6 |
| Kv (rpm/V) | 90 |
| Kt (Nm/A) | 0.107 |
| Ke (V/krpm) | 10.58 |
| Rintangan Fasa ke Fasa (mΩ) | 125 |
| Induktans Fasa ke Fasa (μH) | 87 |
| Inersia (gcm²) | 759.98 |
| Km (Nm/√W) | 0.3026 |
| Konstanta masa mekanikal (ms) | 0.83 |
| Konstanta masa elektrik (ms) | 0.70 |
| Berat (g) | 354 |
| Peratus berat tork maksimum (Nm/kg) | 11.3 |
| Fasa Motor U V W | Pelan kejuruteraan rujukan |
| Port sensor Hall | VCC, GND, Hu, Hv, HW (pelan kejuruteraan rujukan) |
| Koresponden | Hu-U; Hv-V; Hw-W |
Aplikasi
- Robot humanoid
- Lengan robot
- Exoskeleton
- Robot quadruped
- Kenderaan AGV
- Robot ARU
Manual / Dokumen
Untuk pertanyaan pemilihan wayar/pemandu atau bantuan dokumentasi, hubungi sokongan melalui https://rcdrone.top/ atau emel [email protected].
Nota dari carta yang disediakan: Semua data adalah untuk tujuan maklumat sahaja | Tertakluk kepada perubahan tanpa notis.
Butiran

CubeMars R80 KV110 dibina untuk sendi robotik kompak dan pemacu exoskeleton, dengan faktor bentuk gaya penggerak yang rendah.

Sensor Hall terintegrasi memberikan maklum balas kedudukan rotor untuk kawalan FOC yang stabil, dengan penyimpangan ketepatan sudut elektrik dianggarkan pada ±10°.

Reka bentuk pengaliran haba khas menggunakan asas ultra-ringan dan pad silikon dengan konduktiviti terma tinggi untuk membantu menguruskan suhu dalam binaan kompak.

Lubang pemasangan corak pada loceng memudahkan pemasangan gearbox harmonik, flang, atau jenis gearbox lain.
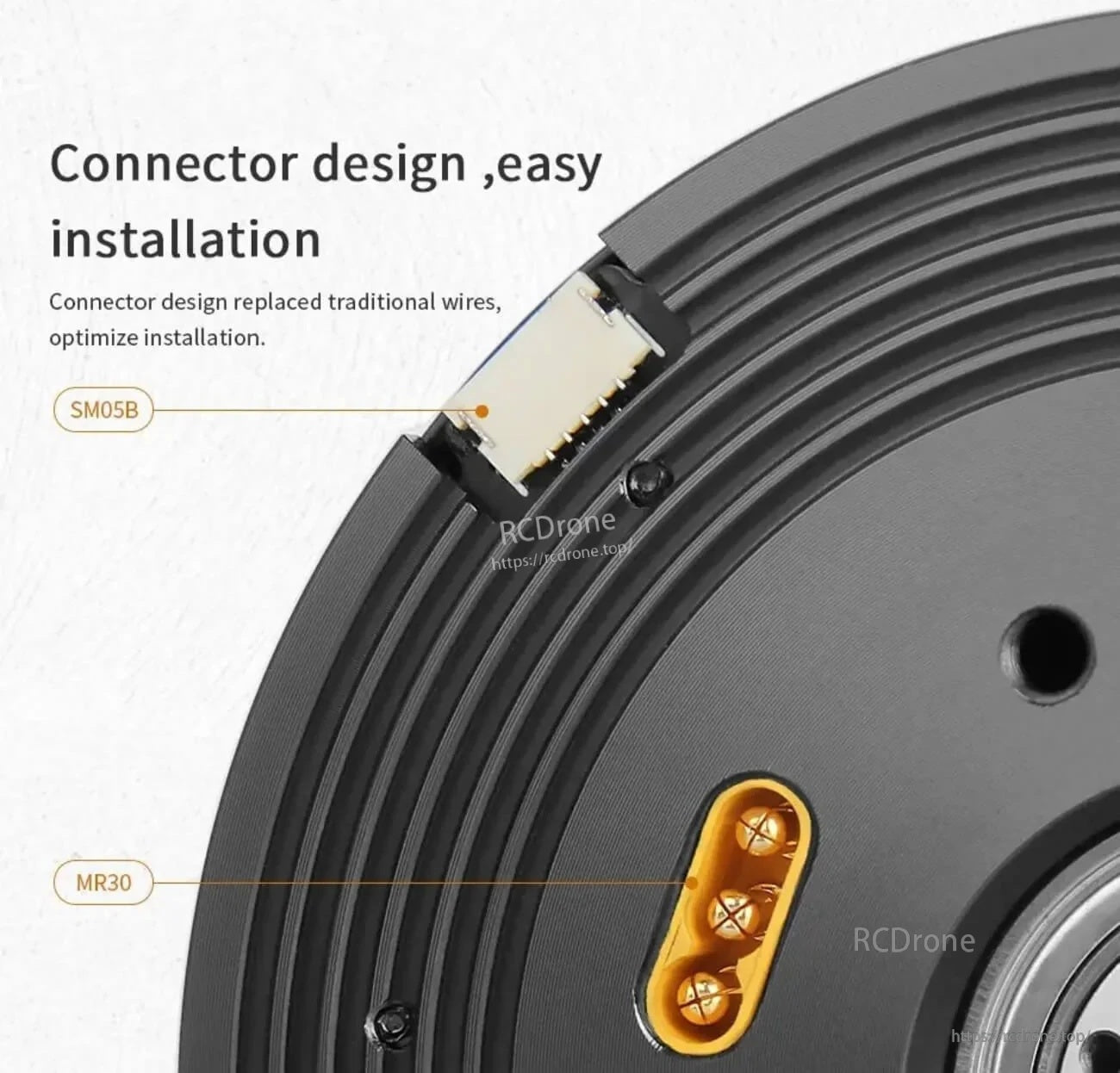
Wiring gaya penyambung menggantikan wayar longgar tradisional untuk pemasangan sambungan kuasa dan sensor yang lebih bersih dan cepat.
Reka bentuk elektromagnetik yang dioptimumkan menyasarkan tork cogging yang rendah dan inersia rotor yang rendah untuk kawalan gerakan yang lebih lancar.

Direka untuk robot berkaki beban berat dan aplikasi sendi tork tinggi lain di mana output yang stabil adalah penting.

Jadual operasi kelajuan‑vs‑tork 48V membantu memilih julat berterusan yang selamat dan memahami keupayaan puncak jangka pendek.
Related Collections





