




CubeMars RI60 KV120 Motor Tork Tanpa Bingkai | 0.57Nm, 120KV, 48V BLDC untuk Cobot & Exoskeleton
CubeMars RI60 KV120 Motor Tork Tanpa Bingkai | 0.57Nm, 120KV, 48V BLDC untuk Cobot & Exoskeleton
CubeMars
Tidak dapat memuatkan ketersediaan pengambilan
Gambaran Keseluruhan
Motor Tork Inrunner Tanpa Bingkai CubeMars RI60 KV120 direka untuk aplikasi robotik yang padat dan berprestasi tinggi. Menyokong voltan operasi 24V/36V/48V, motor BLDC tanpa bingkai ini memberikan ketumpatan tork yang tinggi, gerakan lancar dengan cogging rendah, dan resolusi kawalan tepat 0.01°. Dengan diameter luar yang padat sebanyak Φ60mm dan berat hanya 155.9g, ia adalah ideal untuk lengan cobot, exoskeleton, dan sendi robotik dengan kekangan ruang yang ketat.
Motor ini mempunyai stator yang dililit tangan untuk faktor pengisian tembaga yang optimum, magnet kekal melengkung untuk respons BEMF sinusoidal yang efisien, dan pilihan untuk sensor hall dan integrasi pengodam. Ia menyokong Pengawalan Berorientasikan Medan (FOC), beroperasi dengan boleh dipercayai dari -20°C hingga 50°C, dan mampu menahan sehingga 1.63 Nm tork puncak. Versi rotor yang dipertingkatkan meningkatkan ketepatan sensor hall dengan meningkatkan julat pengesanan sebanyak 2mm.
Ciri Utama
-
Reka Bentuk BLDC Tanpa Bingkai – Tiada rumah luar, ideal untuk pemasangan terbenam
-
Kepadatan Tork Tinggi – Nisbah tork kepada berat maksimum 10.46 Nm/kg
-
Pengawalan Ketepatan – Serasi dengan pengod encoders resolusi tinggi, menyokong 0.01° penentuan
-
Tork Cogging Rendah – Operasi lancar, pengurangan getaran, dan bunyi
-
Toleransi Suhu – Beroperasi dalam suhu ambien dari -20°C hingga 50°C
-
Antara Muka Kawalan Pelbagai – Menyokong maklum balas pengod dan sensor hall
-
Stator Gulung Tangan – Isian tembaga yang sangat baik, 0.5mm jarak tepi untuk pemasangan yang mudah
-
Versi Rotor Pilihan – +2mm ketinggian rotor meningkatkan penjajaran sensor hall
Spesifikasi Teknikal
Permohonan & Konfigurasi
| Parameter | Nilai |
|---|---|
| Permohonan | Lengan Cobot / Exoskeleton |
| Kaedah Pemanduan | FOC |
| Fasa | 3 Fasa |
| Jenis Penggulungan | Delta |
| Pasangan Tiang | 14 |
| Kelas Penebat | C |
| Voltan Penebat | 500V 5mA/2s |
| Rintangan Penebat | 500V 10MΩ |
| Suasana Operasi. | -20℃ ~ 50℃ |
Ciri-ciri Elektrik
| Parameter | Nilai |
|---|---|
| Voltan Terperingkat (V) | 24 / 36 / 48 |
| Kelajuan Tanpa Beban (rpm) | 2532 / 3798 / 5064 |
| Kelajuan Terperingkat (rpm) | 1440 / 2320 / 3190 |
| Tork Terperingkat (Nm) | 0.57 |
| Tork Puncak (Nm) | 1.63 |
| Arus Terperingkat (ADC) | 5.6 |
| Arus Puncak (ADC) | 16.8 |
| Kv (rpm/V) | 120 |
| Ke (V/krpm) | 9.03 |
| Kt (Nm/A) | 0.100 |
| Rintangan Fasa (mΩ) | 900 |
| Induktans Fasa (μH) | 877.5 |
| Inersia (g·cm²) | 33.05 |
| Km (Nm/√W) | 0.1054 |
| Masa Pemalar Mekanikal (ms) | 0.3 |
| Masa Pemalar Elektrik (ms) | 0.98 |
| Berat (g) | 155.9 |
| Nisbah Tork/Berat | 10.46 Nm/kg |
Pilihan Pengodak & Sensor Hall
-
Dengan Sensor Hall: Peningkatan pengesanan rotor, disyorkan untuk pengesanan kedudukan yang tepat tinggi
-
Tanpa Sensor Hall: Reka bentuk kompak untuk persekitaran terhad
-
Pengodak yang Disokong: Renishaw, Sick, pengodak ketepatan tinggi lain (0.01° resolusi)
Dimensi Mekanikal
| Versi | Diameter Luar | Diameter Dalam | Ketinggian Rotor | Ketebalan Maks |
|---|---|---|---|---|
| Tanpa Hall | Ø60 mm | Ø30 mm | 15 mm | 21 mm (maks) |
| Dengan Hall | Ø60 mm | Ø30 mm | 15 mm | 23 mm (maks) |
Rujuk kepada lukisan teknikal untuk toleransi tepat dan corak lubang pemasangan.
Kurva Prestasi
Diuji pada 24VDC:
-
Kecekapan maksimum pada ~0.3 Nm
-
Daya keluaran puncak >125W pada ~1.1 Nm
-
Kelajuan maksimum ~2500 RPM
-
Respons arus stabil merentasi julat tork
Maklumat Pendawaian & Penyambung
| Wayar | Warna + Saiz |
|---|---|
| U | Hitam + 18# Silikon |
| V | Kuning + 18# Silikon |
| W | Merah + 18# Silikon |
| Hu | Biru + 30# Silikon |
| Hv | Hijau + 30# Silikon |
| Hw | Kuning + 30# Silikon |
| VCC | Merah + 30# Silikon |
| GND | Hitam + 30# Silikon |
Peta Pendawaian:
Hu-U, Hv-V, Hw-W
Muat Turun Manual
![]() RI60 dengan sensor hall-2D.pdf
RI60 dengan sensor hall-2D.pdf
![]() RI60 dengan sensor hall-3D.zip
RI60 dengan sensor hall-3D.zip
Aplikasi
-
Robot kolaboratif
-
Sendi eksoskeleton
-
Robot berkaki dan quadruped
-
Robotik perubatan tepat
-
Modul servo terbenam
Butiran
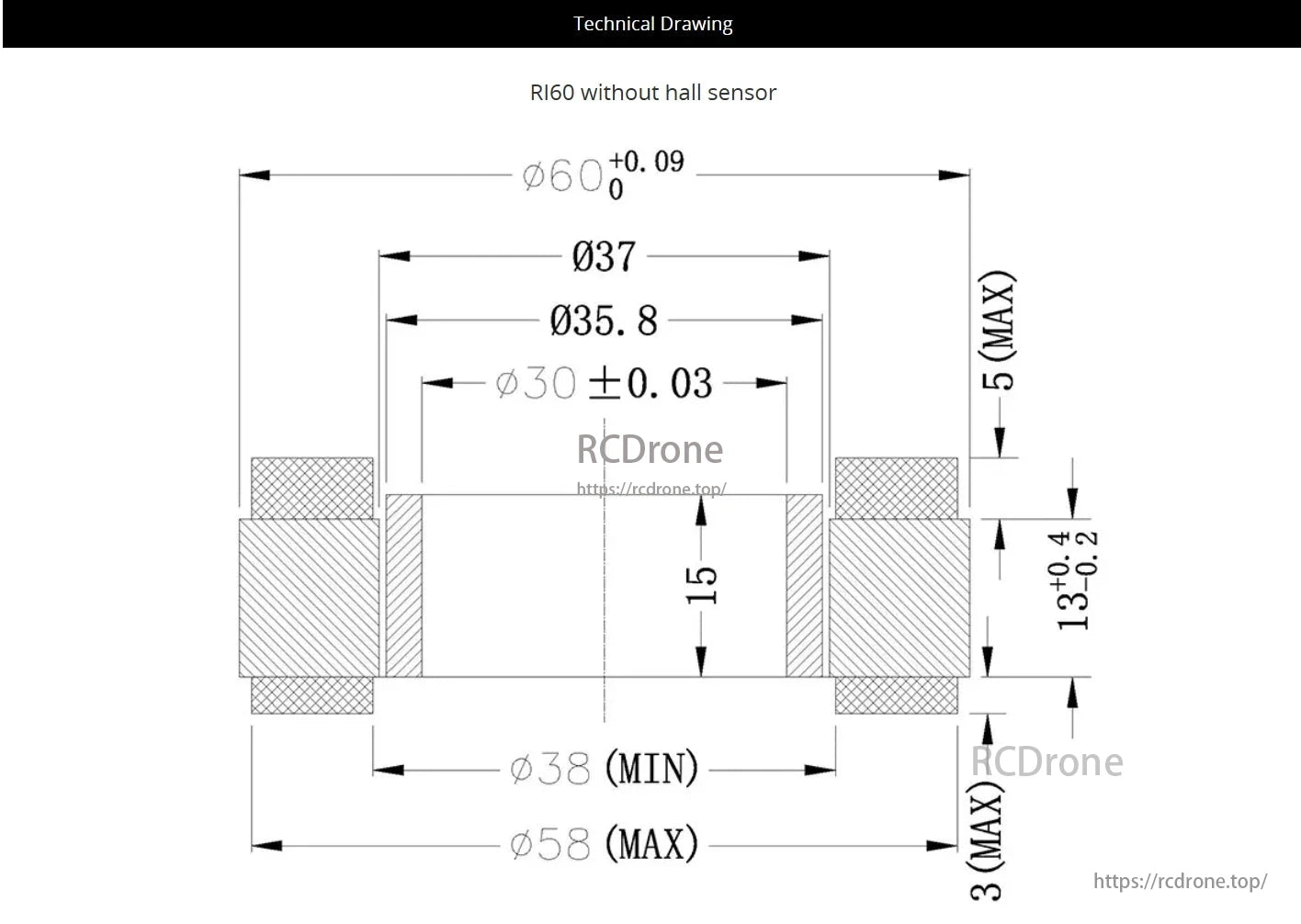
CubeMars Dimensi Motor RI60: Ø60, Ø37, Ø35.8, Ø30, Ø38 (min), Ø58 (max), 15 panjang, 5 ketinggian maksimum, 13 ±0.4 lebar.
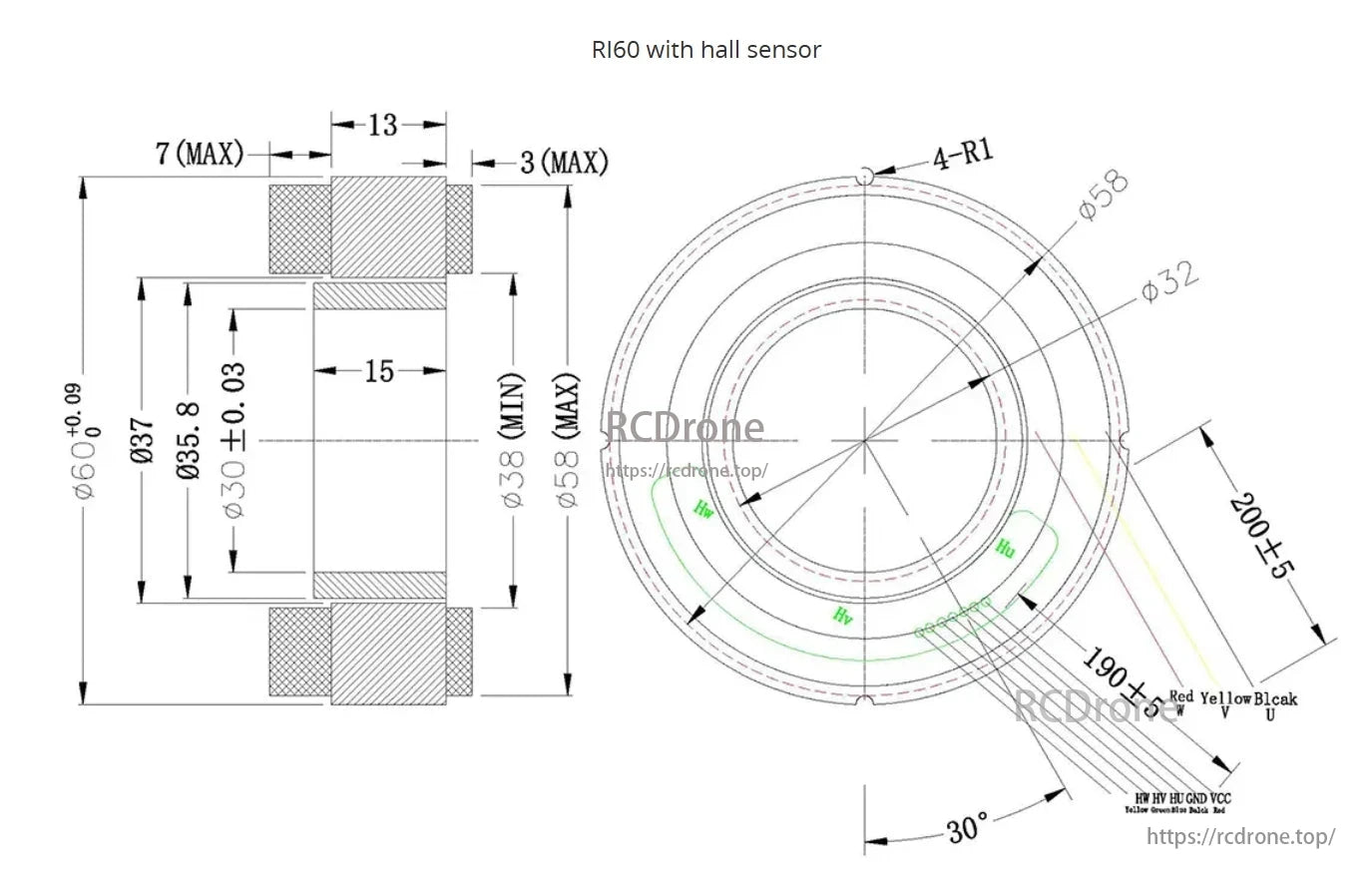
Motor CubeMars RI60 dengan sensor hall. Dimensi: diameter 60mm, panjang 200mm. Ciri-ciri termasuk tanda 4-R1, φ58, φ32, dan sudut 30°. Termasuk label HW, HV, HU.
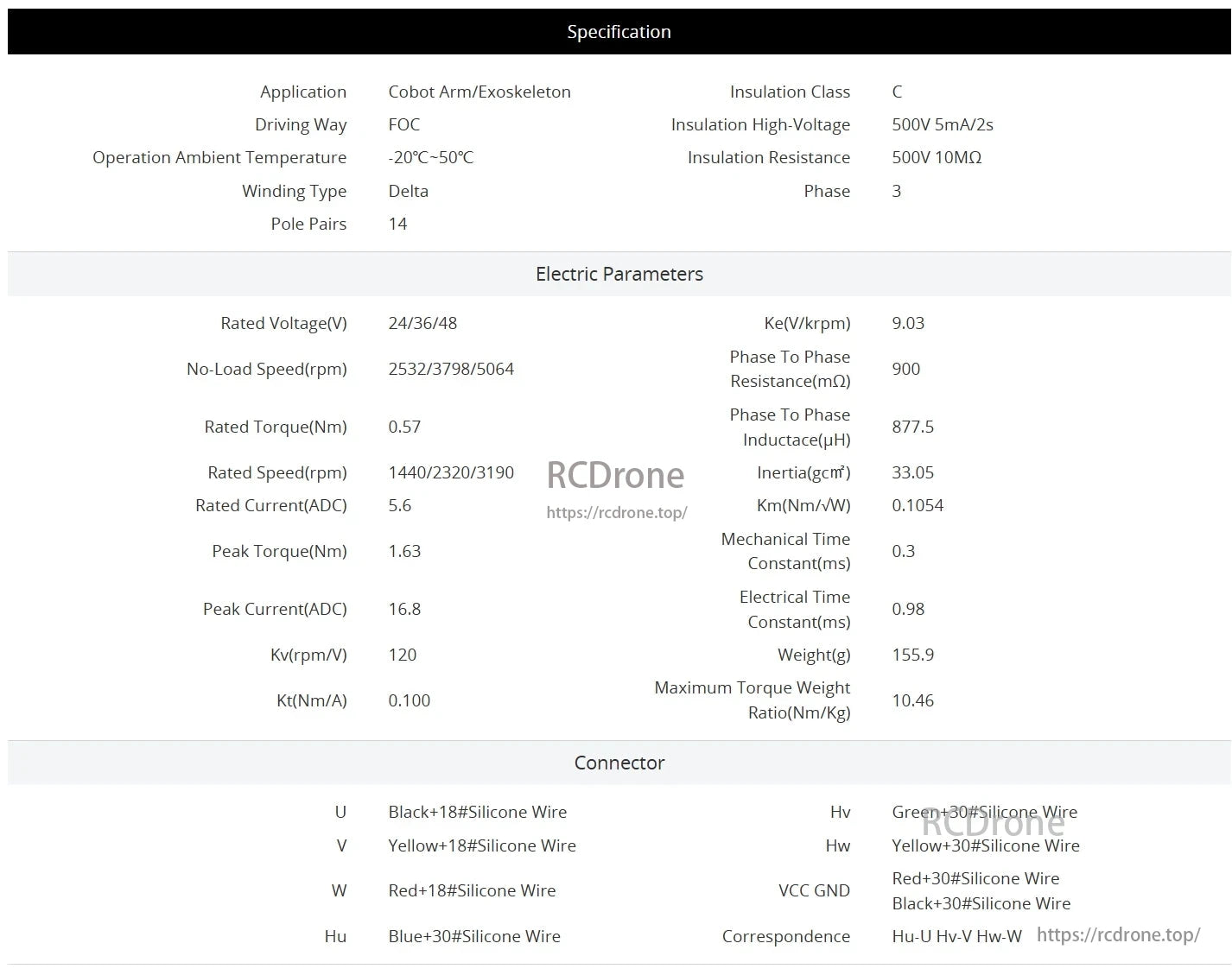
Motor CubeMars RI60: aplikasi lengan cobot/exoskeleton, pemanduan FOC, operasi -20°C-50°C, 14 pasang kutub. Voltan yang dinilai 24/36/48V, kelajuan tanpa beban 2532/3798/5064rpm, tork yang dinilai 0.57Nm, tork puncak 1.63Nm.
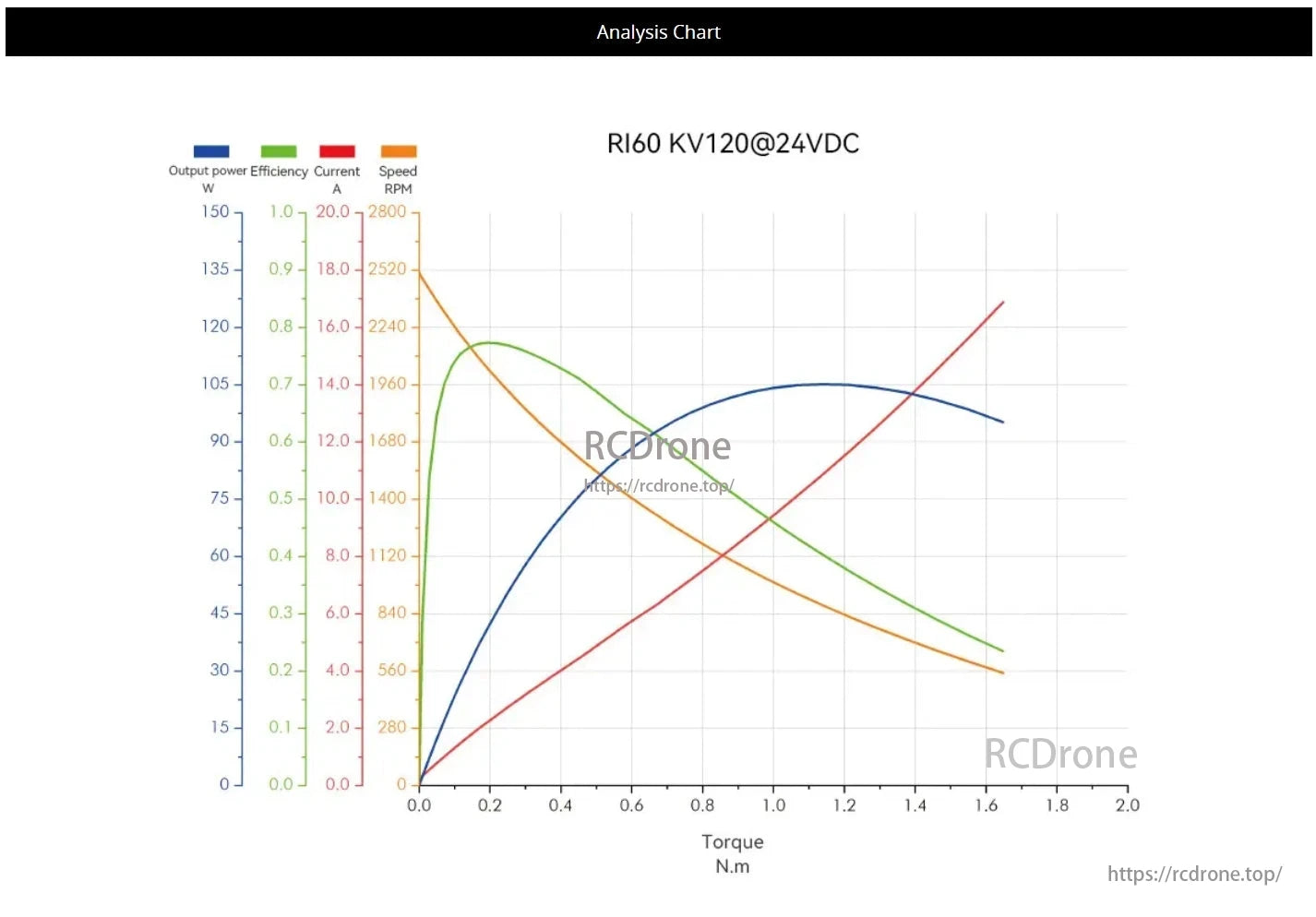
Jadual analisis motor CubeMars RI60 di KV120@24VDC. Dispmenunjukkan kuasa output, kecekapan, arus, dan kelajuan berbanding tork. Kecekapan memuncak hampir 0.2 N.m, dengan kelajuan menurun apabila tork meningkat.
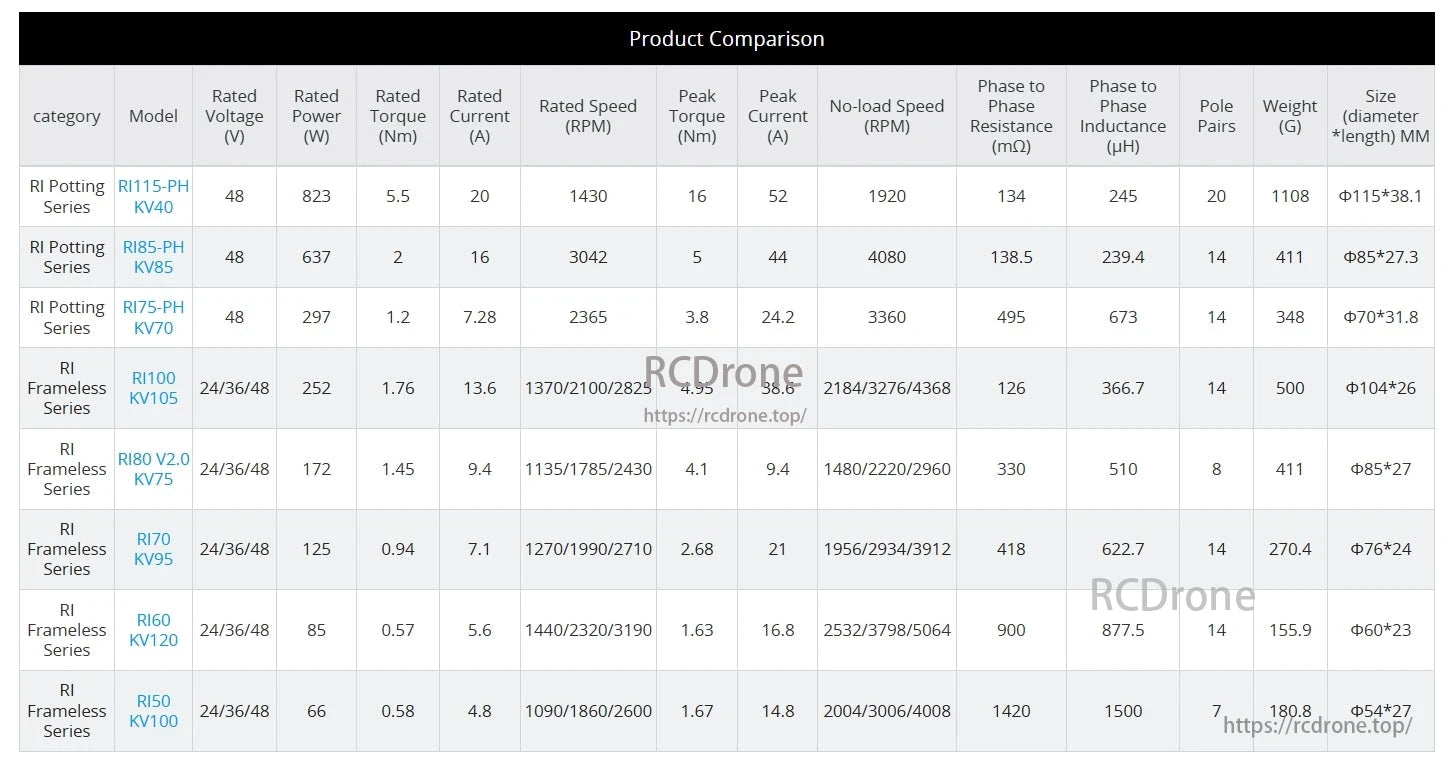
Motor CubeMars RI60 KV120: 24/36/48V, 85W, tork 0.57Nm, arus 5.6A, kelajuan 1440/2320/3190 RPM, tork puncak 1.63Nm, arus puncak 16.8A, rintangan 900mΩ, induktans 877.5µH, 14 pasang kutub, berat 155.9g, saiz φ60*23mm.

Motor CubeMars RI60: Tork cogging yang lebih rendah, operasi lancar, bunyi rendah, dinamik yang kuat.

Stator yang dililit tangan dengan kelegaan 0.5mm untuk prestasi optimum.

Magnet kekal melengkung untuk reka bentuk motor BEMF Sinus, memastikan kawalan yang mudah.

Versi Tinggi Rotor RI60. Ketinggian keseluruhan meningkat sebanyak 2mm untuk pengesanan sensor hall yang lebih baik.
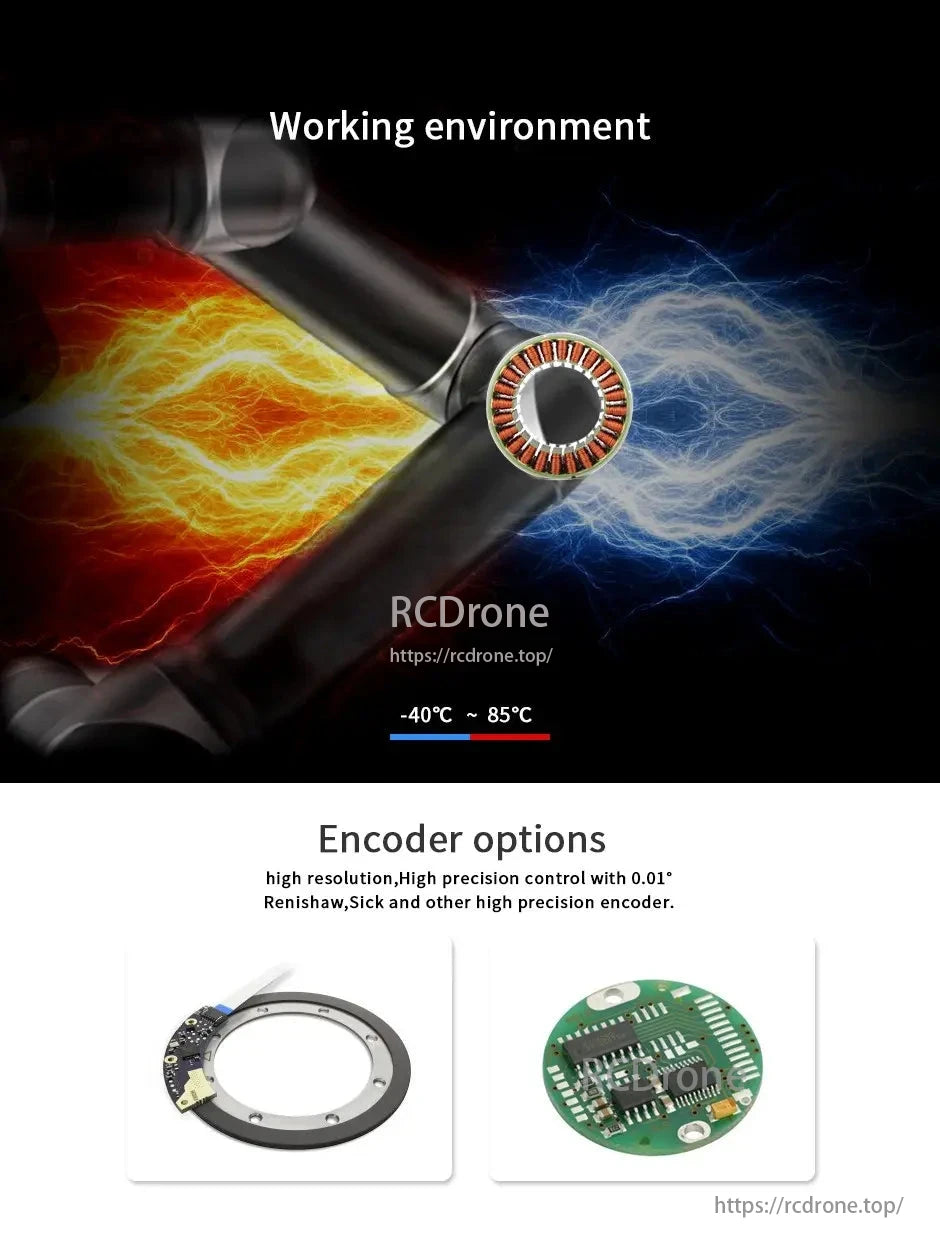
Motor CubeMars RI60: -40°C hingga 85°C, pilihan pengod encoder resolusi tinggi.
Related Collections




