


DAMIAO DMH3510 24 V 0.45 N m Puncak 500 rpm CAN/CAN FD Pengekod Magnetik 42 mm Motor Robot untuk Robotik
DAMIAO DMH3510 24 V 0.45 N m Puncak 500 rpm CAN/CAN FD Pengekod Magnetik 42 mm Motor Robot untuk Robotik
DAMIAO
Tidak dapat memuatkan ketersediaan pengambilan
Senario Aplikasi
Spesifikasi Teknikal
| Parameter | Nilai | |
|---|---|---|
| Model |
DMH3510
|
|
| Voltan Nominal | 24V | |
| Arus Nominal | 1.1A | |
| Arus Puncak | 3.2A | |
| Tork Nominal | 0.18N.M | |
| Tork Puncak | 0.45N.M | |
| Kelajuan Nominal |
500rpm |
|
| Kelajuan Maks. Tanpa Beban | 1800rpm | |
| html | ||
| Nisbah Pengurangan | 1:1 | |
| Pasangan Tiang | 7 | |
| Induktans Fasa | 1.67μH | |
| Rintangan Fasa | 2.25Ω | |
| Diameter Luar | 42mm | |
| Tinggi | 31.5mm | |
| html | Berat Motor | 116g |
| Jenis Pengodok | Pengodok Magnetik | |
| Antara Muka Kawalan |
CAN@1Mbps、CANFD@5Mbps |
|
| UART@921600bps |
Ciri-Ciri Motor
1. Reka bentuk motor dan pemacu yang terintegrasi, struktur padat, dan pengintegrasian yang tinggi.
2. Maklum balas kelajuan motor, kedudukan, tork, dan maklumat suhu melalui bas CAN.
3. Perlindungan suhu berganda.
4.
Penyesuaian parameter visual melalui komputer host, membolehkan konfigurasi yang mudah dan sedia untuk digunakan.
5. Menyokong CAN FD dengan kadar baud maksimum 5Mbps.
6. Kelajuan rendah, tork tinggi.
7. Penukaran fleksibel antara pelbagai mod kawalan.
Senarai Pakej
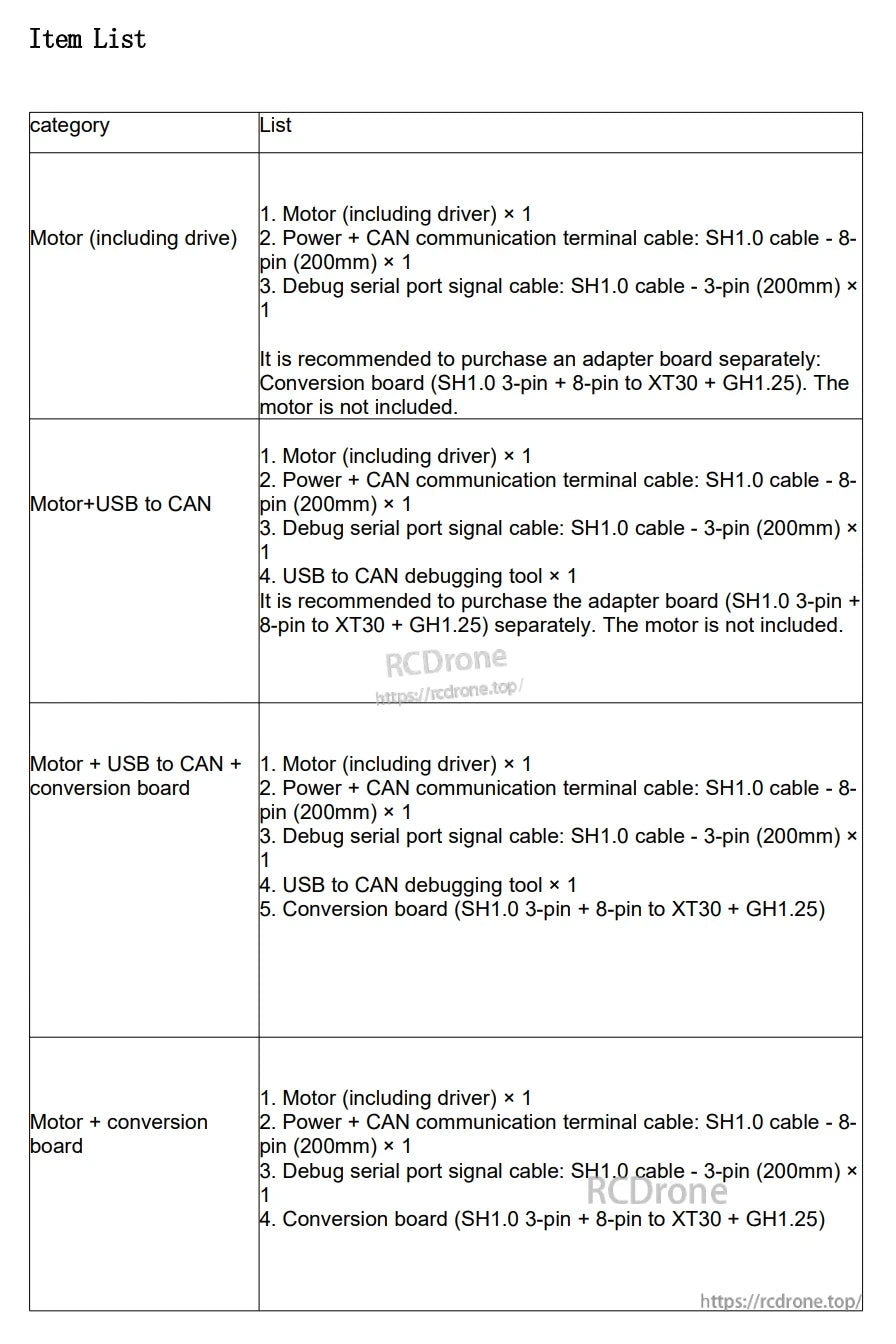
Senarai item untuk DMH3510 Magnetic Motor termasuk motor dengan pemacu, kabel kuasa dan CAN, kabel debug, alat USB ke CAN, dan papan penukaran. Komponen berbeza mengikut jenis pakej, dengan papan penyesuai disyorkan secara berasingan. Motor tidak termasuk dalam semua pilihan.
Related Collections


