




DFRobot SEN0142 MPU6050 6 DOF Giroskop Pecutan Modul IMU dengan Pemproses Gerakan Digital I2C untuk Arduino & Robotik
DFRobot SEN0142 MPU6050 6 DOF Giroskop Pecutan Modul IMU dengan Pemproses Gerakan Digital I2C untuk Arduino & Robotik
DFRobot
Tidak dapat memuatkan ketersediaan pengambilan
Tinjauan
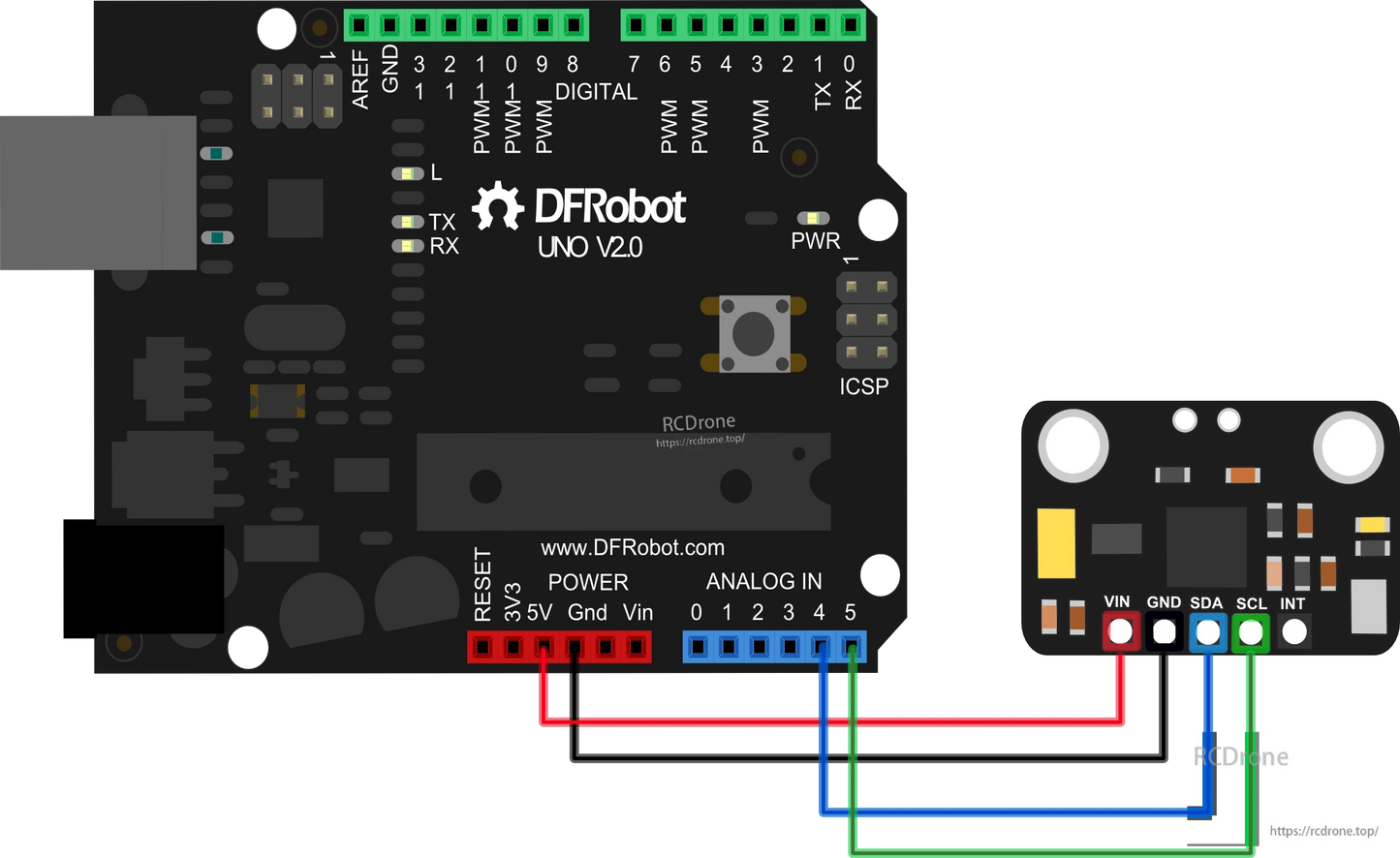
Modul DFRobot SEN0142 MPU6050 6 DOF IMU mengintegrasikan giroskop 3-paksi dan accelerometer 3-paksi pada satu cip, memberikan pengesanan gerakan yang tepat untuk robotik, dron, peranti boleh pakai, dan projek Arduino. Dengan ciri Pemproses Gerakan Digital (DMP), ia menyokong algoritma MotionFusion 6-paksi dan 9-paksi, membolehkan output kuaternion, sudut Euler, dan data sensor mentah. Dengan julat voltan input yang luas iaitu 3V–5V, MPU6050 boleh disambungkan terus ke Arduino dan mikropengawal lain untuk penjejakan gerakan masa nyata dan pengesanan isyarat.
Ciri Utama
-
Menggabungkan giroskop 3-paksi dan accelerometer 3-paksi dalam satu cip
-
Julat accelerometer boleh diprogram: ±2g, ±4g, ±8g, ±16g
-
Kepekaan giroskop: ±250, ±500, ±1000, ±2000 dps
-
Pemproses Gerakan Digital (DMP) untuk MotionFusion dan pengenalan isyarat di atas kapal
-
Antara muka digital I2C menyokong format matriks, kuaternion, Euler, dan data mentah
-
Kalis bias terbenam & kalibrasi kompas untuk ketepatan yang lebih baik
-
Serasi dengan Arduino dan elektronik boleh pakai melalui I2Cdevlib
Spesifikasi
-
Voltan Kerja: 3–5 V
Output: Data MotionFusion digital I2C (6/9-paksi)
-
Accelerometer: Julat boleh atur ±2g / ±4g / ±8g / ±16g
-
Gyroscope: Sensitiviti ±250 / ±500 / ±1000 / ±2000 dps
-
Format Data: Matriks putaran, kuaternion, sudut Euler, data mentah
-
Dimensi: 14 × 21 mm
Permohonan
-
Pengesanan gerakan robotik
-
Arduino & projek elektronik DIY
-
Interaksi Manusia-Komputer (HCI)
-
Peranti boleh pakai dan kawalan isyarat
-
Sistem navigasi dan penyeimbangan (e.g., Pengangkutan jenis Segway)
-
Pemantauan dan penstabilan drone
Butiran



Contoh Kod
Sila muat turun perpustakaan untuk semua sensor IMU terlebih dahulu!




- Memilih pilihan menghasilkan muat semula halaman penuh.
- Dibuka dalam tetingkap baharu.