Kit Pembangunan Dron Boleh Aturcara F450-4B Raspberry Pi - Platform Dron Sumber Terbuka Industri Ardupilot DIY Pixhawk
Kit Pembangunan Dron Boleh Aturcara F450-4B Raspberry Pi - Platform Dron Sumber Terbuka Industri Ardupilot DIY Pixhawk
RCDrone
Tidak dapat memuatkan ketersediaan pengambilan
Gambaran keseluruhan
The F450-4B Drone Raspberry Pi adalah maju Kit Dron DIY yang menggabungkan yang berkuasa Raspberry Pi 4B komputer onboard dengan serba boleh Pengawal penerbangan Pixhawk 2.4.8, menjadikannya sangat boleh disesuaikan dan dron boleh diprogramkan platform. ini Platform Drone sumber terbuka menyokong alat canggih seperti Dronekit-python, membolehkan pembangun mencipta misi autonomi, penghantaran data masa nyata dan aplikasi pemprosesan imej berkuasa AI. Dengan bingkai 450mm yang teguh, kamera HD 200MP, bateri 3S 5200mAh untuk penerbangan sehingga 20 minit, dan mod penerbangan lanjutan seperti tahan ketinggian, pulang ke rumah dan mod bulatan, Kit Drone F450 adalah pilihan yang ideal untuk peminat, penyelidik dan pendidik yang mencari pengalaman pembangunan dron yang inovatif.
Ciri-ciri Utama
Perkakasan Berprestasi Tinggi
- Raspberry Pi 4B: Dikuasakan oleh pemproses empat teras 1.5GHz 64-bit, menyokong output video 4K dan komunikasi WiFi berkelajuan tinggi untuk operasi yang boleh dipercayai.
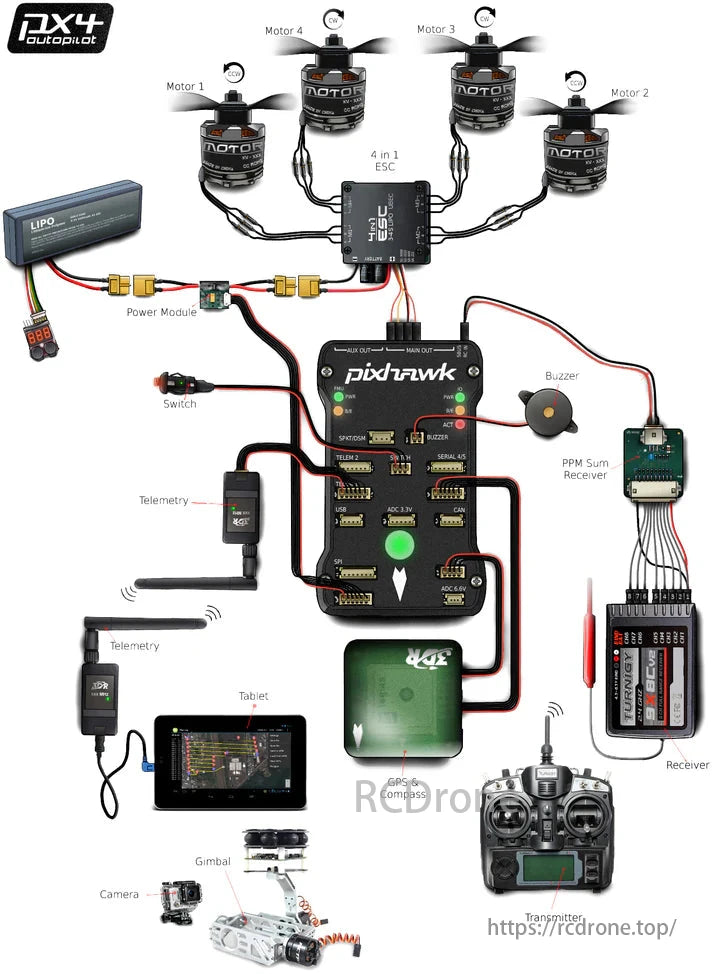
- Pixhawk 2.4.8 Pengawal Penerbangan: Dilengkapi dengan berbilang penderia bersepadu, memastikan kawalan sikap, melayang dan perancangan misi yang tepat.
- Sokongan Pengembangan Visi: Dipasangkan dengan kamera monokular dan alat OpenCV, kit ini memenuhi keperluan penghantaran dan pemprosesan imej masa nyata.
Mod Penerbangan Pelbagai
- Tahan Ketinggian (AltHold): Mengekalkan ketinggian penerbangan yang stabil.
- Tuding: Menyediakan legar pegun yang tepat.
- Kembali ke Rumah (Kembali): Kembali ke titik permulaan secara automatik semasa kehilangan isyarat atau bateri lemah.
- Pendaratan (Tanah): Melaksanakan pendaratan autonomi yang lancar.
- Mod Penstabilan: Melaraskan sikap penerbangan secara automatik.
- Mod Bulatan: Melakukan penerbangan bulat mengelilingi sasaran.
- Mod Tanpa Kepala: Mengeluarkan kekangan arah untuk kawalan yang lebih mudah.
- Pulangan Luar Kawalan: Kembali ke lokasi pratetap apabila isyarat hilang.
- Pendaratan Kuasa Rendah: Mendarat dengan selamat semasa keadaan bateri lemah.
Penghantaran Data dan Pemprosesan Imej
- Menubuhkan rangkaian WiFi tempatan melalui hotspot terbina dalam tanpa memerlukan penghala luaran, membolehkan penghantaran data dan imej masa nyata.
- Menyokong penstriman dan analisis video berasaskan OpenCV, sesuai untuk pemantauan imej dan aplikasi pintar.
Spesifikasi
Parameter Dron
| Parameter | Butiran |
|---|---|
| Nama | Kit Dron F450 |
| Jarak roda | 450mm |
| Berat badan | 1493g (dengan bateri dan Raspberry Pi 4B) |
| Pengawal Penerbangan | Pixhawk 2.4.8 pengawal penerbangan sumber terbuka |
| Komputer Onboard | Raspberry Pi 4B |
| Kamera | 200MP HD 1080P |
| Sokongan Berlegar | Modul aliran optik dan sensor jarak laser |
| Modul GPS | m8n GPS |
| Masa Penerbangan | ~20 minit (bergantung kepada persekitaran dan misi) |
| Bateri | 3S 5200mAh (11.1V) |
| Kapasiti Muatan | 500g |
| Rintangan Angin | Tahap 3-4 |
| Motor | SunnySky A2212 |
| ESC | Hobbywing 20A ESC (menyokong bateri LiPo 3S-4S) |
| Baling-baling | Kipas pengunci sendiri T1045 |
| Ketinggian Maks | 2000m (tanpa gangguan) |
| Jarak Penerbangan | 1000m |
| Senario Penerbangan | Dalaman / Luaran |
Pixhawk 2.4.8 Spesifikasi Pengawal Penerbangan
- Pemproses: ARM 32-bit STM32F427 Korteks M4, 168MHz, RAM 256KB
- Penderia:
- L3GD20 3 paksi 6DOF giroskop
- LSM303D 3-axis 14-bit accelerometer/magnetometer
- MPU6000 6 paksi pecutan/magnetometer
- MS5611 barometer ketepatan tinggi
- Keserasian Kawalan Tanah: QGroundControl, MissionPlanner
- Dimensi: 81mm x 47mm x 16mm; Berat: 37g
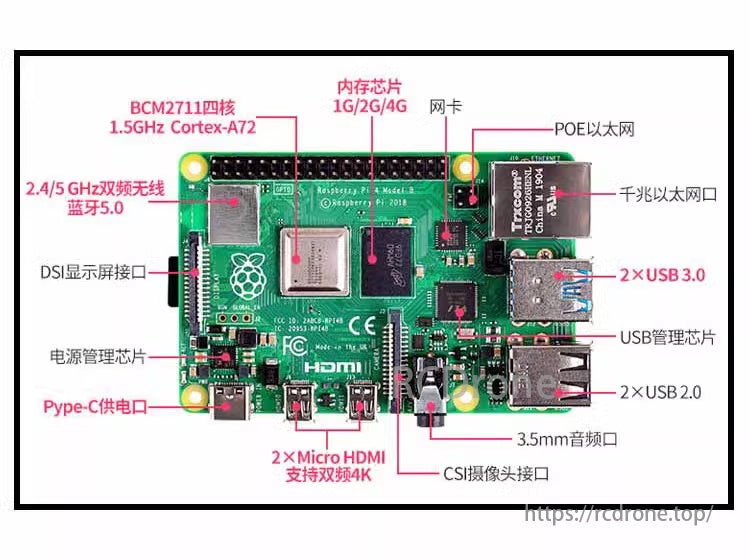
Spesifikasi Raspberry Pi 4B
- Chipset: Broadcom BCM2711
- CPU: 64-bit 1.5GHz quad-core
- GPU: Teras Video 500MHz VI
- RAM: 4GB DDR4
- Antara muka: 2 x USB 3.0, 2 x USB 2.0
- Output Video: Dua port HDMI mikro, menyokong 4K@60Hz
- Komunikasi: Bluetooth 5.0, WiFi 5 (2.4/5GHz)
- Bekalan Kuasa: USB Jenis-C (5V 3A)
Pakej Termasuk
Konfigurasi 1: Motor SunnySky A2212 dengan Jauh dan Telemetri FlySky i6
- Bingkai F450 dengan gear pendaratan
- Motor SunnySky A2212 (4 pcs)
- Hobbywing 20A ESCs (4 pcs)
- Kipas pengunci sendiri T1045 (4 pasang)
- Modul GPS PIX M8n
- Plat peredam getaran
- Alat kawalan jauh FlySky i6
- Bateri 3S 5200mAh
- Pengecas baki B3
- Lekapan GPS
- Modul telemetri voltan FS

Termasuk: Tali bateri, pengikat kabel nilon, pad kayu, pita pelekat 3M, buzzer, alatan pemasangan
Video pemasangan dan penyahpepijatan, bahan berkaitan disediakan; hubungi khidmat pelanggan untuk mendapatkan kod sumber.
Konfigurasi 2: Motor SunnySky A2212 dengan Radiolink PRO
- Bingkai F450 dengan gear pendaratan
- Motor SunnySky A2212 (4 pcs)
- Hobbywing 20A ESCs (4 pcs)
- 9450 kipas pengunci sendiri (3 pasang)
- PIX.Kit modul GPS M8n
- Plat peredam getaran
- Radiolink PRO (penerima R9DS)
- Bateri kawalan 3S 2200mAh
- Bateri 3S 5200mAh
- Pengecas baki B3
- Lekapan GPS

Termasuk: Tali bateri, pengikat kabel nilon, pad kayu, pita pelekat 3M, buzzer, alatan pemasangan
Video pemasangan dan penyahpepijatan, bahan berkaitan disediakan; hubungi khidmat pelanggan untuk mendapatkan kod sumber.
Pemasangan Kit Dron F450
Senario Aplikasi
Kit Pembangunan Dron F450-4B sesuai untuk:
- R&D dron: Penyelidikan universiti, ujian pengawal penerbangan, pembangunan algoritma.
- Aplikasi Pintar: Perancangan laluan, pengecaman sasaran dan pengelakan halangan.
- Eksperimen Pendidikan: Pengaturcaraan, pemasangan perkakasan dan penyahpepijatan.
- Penggunaan Medan: Berlegar dalaman, tinjauan luar, pemantauan pertanian dan banyak lagi.
Butiran
Platform Pembangunan Dron F450-4B Raspberry Pi
F450 ialah model dron klasik dan biasa digunakan, menawarkan pemasangan yang ringkas dan mudah, prestasi kos tinggi, kepraktisan yang kukuh dan kesesuaian untuk pemula untuk memulakan operasi dron dengan cepat.

Raspberry Pi 4B Dinaik taraf
Kuasa pemprosesan perkakasan Raspberry Pi 4B jauh lebih kuat daripada 3B+.
Raspberry Pi dilengkapi dengan sistem sumber terbuka terkini Ubuntu 20.04, menawarkan pengalaman yang lebih lancar berbanding sistem Ubuntu Mate.

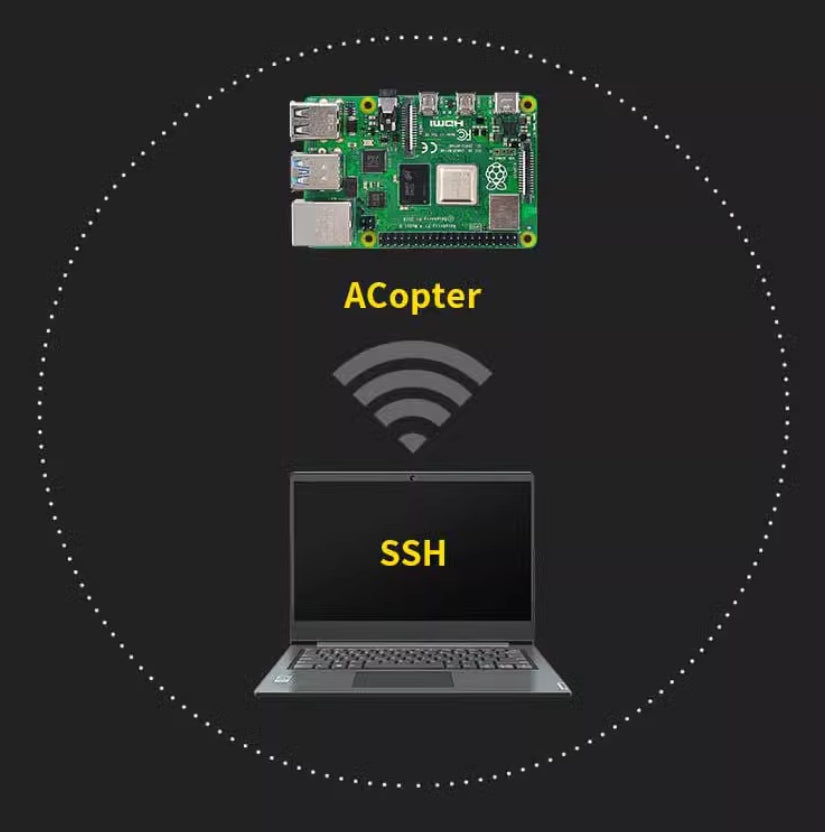
Hotspot WiFi Didayakan Sistem (Acopter)
Menggunakan keupayaan WiFi Raspberry Pi 4B, hotspot binaan sendiri (Acopter) dicipta. PC boleh menyambung terus ke hotspot WiFi 4B untuk membentuk rangkaian tempatan dan menggunakan arahan SSH untuk akses jauh ke Raspberry Pi. Tidak seperti model 3B+ yang memerlukan penghala untuk konfigurasi rangkaian, persediaan ini lebih mudah dan lebih mesra pengguna untuk pemula.
Pemprosesan Visual OpenCV
Kamera monokular ditambah, membolehkan penghantaran imej dan pemprosesan pasca. Strim video boleh ditangkap melalui Raspberry Pi dan diproses menggunakan alatan seperti OpenCV. Strim video HD masa nyata juga boleh dihantar kembali ke PC untuk diproses atau ke peranti mudah alih untuk tontonan.

Lagi Antara Muka Pengembangan
Raspberry Pi 4B menawarkan pelbagai antara muka pengembangan, termasuk dwi port USB 3.0, dwi 4K port HDMI mikro, antara muka CSI dan DSI, gigabit Ethernet, dan bekalan kuasa Jenis-C, memberikan fleksibiliti yang luar biasa untuk pelbagai aplikasi.
Edisi Kamera Tunggal
Edisi kamera tunggal termasuk Raspberry Pi 4B dan kamera monokular, membolehkan komunikasi melalui port bersiri dengan pengawal penerbangan. Ia menyokong tugas seperti pemprosesan visual, pengaturcaraan Python, dan komunikasi. Versi ini sesuai untuk pengguna yang mempunyai pengalaman terdahulu menggunakan Pixhawk, pengetahuan asas Ubuntu (Linux), OpenCV, Raspberry Pi dan komunikasi rangkaian kawasan setempat.
Sebagai tambahan kepada ciri asas, edisi kamera tunggal menyokong penghantaran imej dan data melalui WiFi dan membenarkan kawalan dron melalui Dronkit-python pengaturcaraan.

Kedudukan Aliran Optik
Kawalan Legar Dalaman dengan Dronekit-python Di Bawah Keadaan Kedudukan Aliran Optik

Platform pembangunan dron ini menyokong ROS, Pengaturcaraan Python, Pengecaman imej OpenCV, Penghantaran jarak jauh 4G, dan Pendaratan berpandu visual kod 2D Aruco, menjadikannya sangat serba boleh dan inovatif.

Alat Kawalan Jauh FlySky i6
Dilengkapi dengan penerima ia6b yang dipramuat dengan perisian tegar 10 saluran, modul telemetri voltan, dan julat kawalan jauh melebihi 1000m, sesuai untuk pemula untuk belajar dan berlatih.

Radiolink AT9S Alat Kawalan Jauh
Mempunyai 10 saluran dengan julat kawalan melebihi 2000m. Dilengkapi dengan modul telemetri yang menyediakan data mengenai voltan bateri, kiraan satelit GPS, ketinggian penerbangan, koordinat, mod penerbangan dan banyak lagi.

Soalan Lazim
1. Bolehkah saya melakukan pembangunan sekunder? Bolehkah saya berprogram secara bebas?
Jawapannya ya. Seperti yang diperkenalkan sebelum ini, Ardupilot kini merupakan sistem kawalan penerbangan sumber terbuka yang paling banyak digunakan, dan banyak model dron domestik dan antarabangsa yang sangat baik dibangunkan berdasarkan sistem ini.
Pembangunan sekunder terutamanya mempunyai dua arah: pembangunan kawalan penerbangan dan pengembangan luaran.
- Pembangunan Kawalan Penerbangan
Kami menggunakan Ardupilot, jadi mempelajari pembangunan kawalan penerbangan sumber terbuka terutamanya melibatkan kajian projek sumber terbuka Ardupilot.
- Kemahiran pengaturcaraan yang kuat diperlukan (kod sumber adalah dalam C++), bersama-sama dengan pengetahuan tentang matematik lanjutan (matematik diskret, lelaran, linearisasi), penapisan Kalman dan pembangunan terbenam.
- Asas teori yang kukuh diperlukan. Ini menyediakan anda untuk bekerja pada pembangunan sistem tanpa pemandu dan R&D kawalan penerbangan.
Jika anda ingin menumpukan pada pembangunan kawalan penerbangan, kebanyakan kerja perlu dilakukan pada komputer anda:
- Menyediakan persekitaran pengaturcaraan, memuat turun kod sumber kawalan penerbangan, mengkaji seni bina dan modul fungsinya, dsb.
- Setelah biasa dengan rangka kerja kod, anda boleh memulakan pengaturcaraan berdasarkan kod sedia ada.
Mulakan dengan model kawalan penerbangan asas dan rujuk buku teks kawalan penerbangan Ardupilot yang kami sediakan untuk panduan.
- Pembangunan Pengembangan Luaran
Peluasan luaran membolehkan anda menambah peranti luaran berdasarkan tugas dan senario anda melalui antara muka terpelihara pengawal penerbangan. Contohnya:
- Tambah modul aliran optik untuk penentududukan dalaman dan melayang.
- Tambah radar laser untuk mengelakkan halangan.
- Gunakan telemetri untuk membolehkan perancangan penerbangan dan laluan autonomi.
- Pasang komputer onboard (cth, Raspberry Pi) dan gunakan Dronkit-Python atau ROS untuk memprogram untuk mengawal dron.
Matlamat menambah komputer onboard adalah untuk mengendalikan tugas yang lebih kompleks, seperti:
- Menggunakan kamera Raspberry Pi untuk pengecaman visual (memerlukan OpenCV, YOLO, dll.).
- Menggabungkan protokol komunikasi untuk mengawal penerbangan dron.
- Menghantar data penerbangan atau video definisi tinggi melalui rangkaian.
Fungsi ini tidak boleh dicapai semata-mata dengan bergantung pada pengawal penerbangan.
Mempelajari pengembangan luaran tertumpu terutamanya pada aplikasi, yang juga merupakan hala tuju kebanyakan pertandingan di seluruh negara.Selepas belajar, anda boleh meneroka bidang kritikal dron pintar, seperti pengecaman visual, penyepaduan AI dengan dron dan banyak lagi.
2. Apakah prasyarat untuk pembangunan berdikari?
Belajar tentang dron adalah proses beransur-ansur. Sistem dron adalah antara disiplin dan integratif, melibatkan pelbagai bidang pengetahuan. Untuk mempelajari pembangunan dron, asas berikut diperlukan:
- Kemahiran praktikal asas, termasuk kemahiran menggunakan seterika pematerian, pelbagai pemutar skru dan alatan lain.
- Pengetahuan asas elektronik: konsep seperti voltan, arus, kuasa, kekutuban dan isyarat.
- Pengetahuan asas kawalan automasi: kawalan PID, maklum balas, isyarat digital, isyarat analog, dsb.
- Kemahiran asas komputer: pemacu, port bersiri, kadar baud, versi perisian tegar, versi perisian.
- Pengetahuan asas tentang dron Pixhawk.
- Pengetahuan asas sistem pengendalian Ubuntu.
- Kemahiran bahasa pengaturcaraan: seperti C++ dan Python.
Bagaimana Membuat Drone Respberry PI?
Related Collections