






Produk kami telah lulus pensijilan CE dan ROHS, dan kebanyakannya telah memohon paten penampilan dan paten model utiliti
Feetech SCS225-C006 - 7.4V 19kg 180° 0.192sec/60° 25T Kawalan Siri BUS Servo Robot Arduin Dwi Axis Shafe robot roborock iRobot Roomba robot vakum Servo
Feetech SCS225-C006 - 7.4V 19kg 180° 0.192sec/60° 25T Kawalan Siri BUS Servo Robot Arduin Dwi Axis Shafe robot roborock iRobot Roomba robot vakum Servo
Feetech
Harga biasa
$21.25 USD
Harga biasa
Harga jualan
$21.25 USD
Harga seunit
per
Taxes included.
Penghantaran dikira semasa pembayaran.
Tidak dapat memuatkan ketersediaan pengambilan
SPESIFIKASI
Nama Jenama: Feetech
Asal: Tanah Besar China
Bahan: Plastik
Jenis Plastik: PC
Bahagian & Aksesori RC: Bateri - LiPo
Saiz: 10*10*10
Untuk Jenis Kenderaan: Kereta
Gunakan: Kenderaan & Alat Mainan Kawalan Jauh
Tingkatkan Bahagian/Aksesori: Bateri Litium
Peranti/Peranti Kawalan Jauh: Pengawal Jauh
Bekalan Alat: Bateri
Kuantiti: 1 pcs
Parameter teknikal: KV1100
Nombor Model: SCS225-C006
Atribut Pacuan Empat roda: Motor
Pangkalan roda: Skru
Nombor Model: SCS225-C006
Saiz: 45.23mm X 24.73mm X 35mm
Berat: 55± 1g
Jenis gear: Tembaga
Sudut had: TIADA had
Bearing: Bebola galas
Tanduk gear spline: 25T
Motor: Motor tanpa teras
Julat Voltan Kendalian: 6-7.4V
Tork gerai puncak: 19.5kg.cm@6V
Tork dinilai: 6.5kg.cm@6V
Jenis Protokol: Komunikasi Bersiri Asynchronous Half Duplex
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

Khusus dalam ODM dan OEM dan Dibuat Tersuai 1. Label atau cetakan Logo Anda
2. Wayar Servo
3. Pembungkusan: Beg PE, Kotak Warna, kotak plastik yang bijak
Logo anda
4.Penyambung kabel
5.Disesuaikan Pelbagai servo voltan kerja lebar
2. Wayar Servo
3. Pembungkusan: Beg PE, Kotak Warna, kotak plastik yang bijak
Logo anda
4.Penyambung kabel
5.Disesuaikan Pelbagai servo voltan kerja lebar
Penggunaan Produk

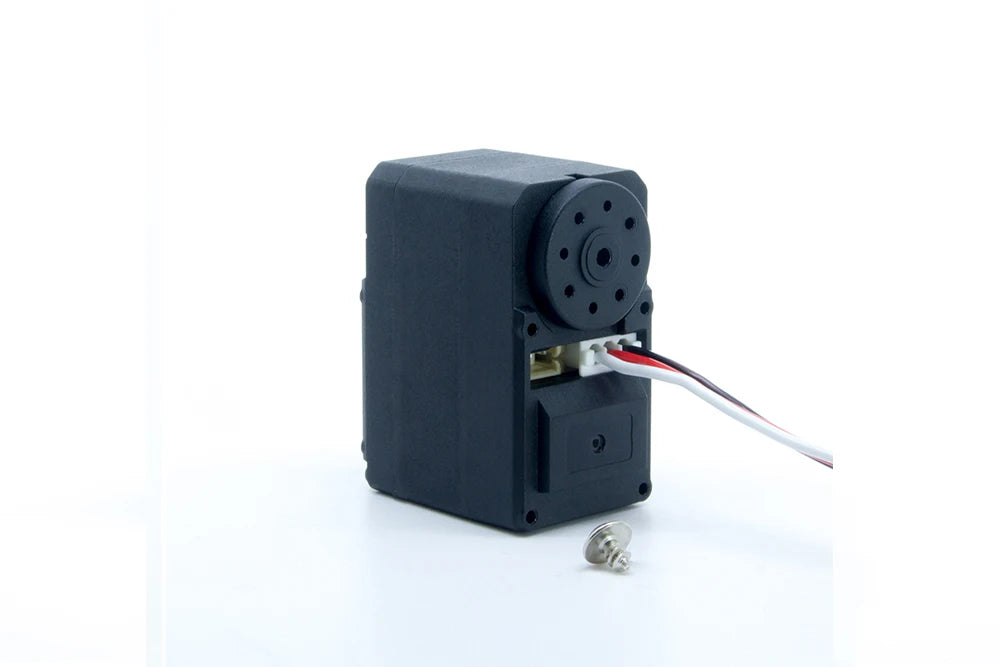
FEETECH 7.4V 20KG.CM Sarung Plastik Pengekod Magnetik Gear Logam Aci dua Servo Bas Bersiri TTL
Imej Butiran

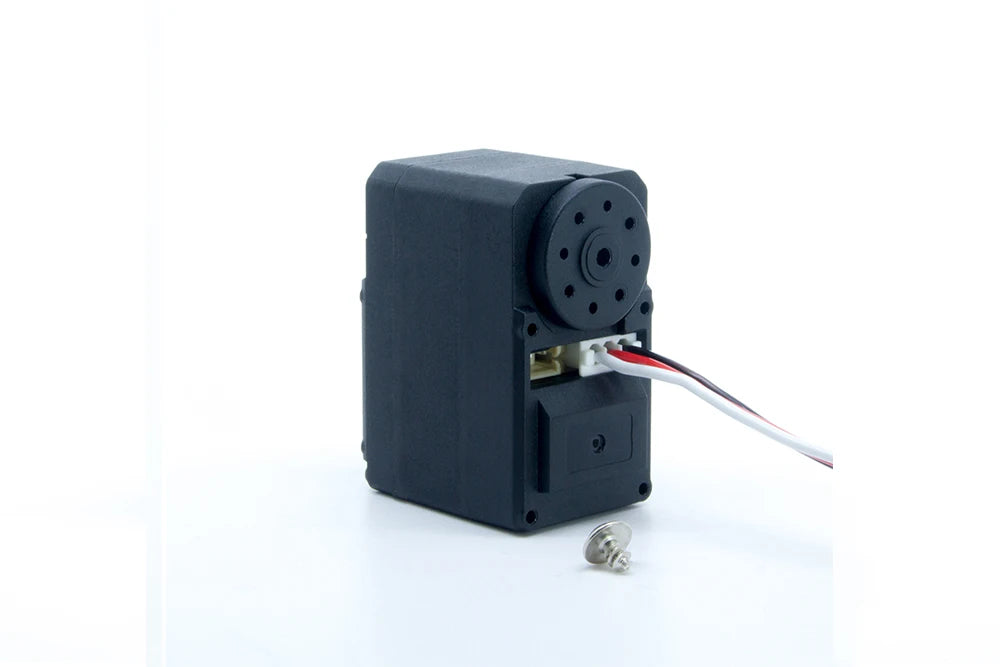



Imej Butiran
FEETECH 7.4V 20KG.CM Sarung Plastik Pengekod Magnetik Gear Logam Aci dua Servo Bas Bersiri TTL
Fungsi kawalan elektronik:
1.Fungsi henti permulaan pecutan: nilai kelajuan dan pecutan boleh ditetapkan, kesan gerakan lebih lembut.
2.Ketepatan tinggi, 360 darjah kedudukan mutlak ketepatan bit 4096, resolusi kedudukan tertinggi ialah 0.088 darjah, jika kawalan adalah 90 darjah, input 4096 / 360 * 90 = 1024, jika kawalan adalah 180 darjah, input 4096 / 360 * 180 = 2048, untuk mengira .
3.Terdapat empat pensuisan mod berfungsi (servo kedudukan mod 0, gelung tertutup kelajuan mod 1, gelung buka kelajuan mod 2, servo langkah 3 mod).
1)、 Mod 0:Mod lokasi, mod lalai. Dalam mod ini, kawalan sudut mutlak 360 darjah boleh direalisasikan. Menyokong pergerakan pecutan.
2)、Mod 1:Kelajuan gelung tertutup, dalam antara muka pengaturcaraan, mod operasi ditetapkan kepada 1, tukar ke mod gelung tertutup kelajuan, dan masukkan kelajuan yang sepadan dalam lajur kelajuan untuk dijalankan .
3)、Mod 2:Kelajuan gelung terbuka, dalam antara muka pengaturcaraan, mod operasi ditetapkan kepada 2, tukar kepada mod gelung terbuka laju dan masukkan masa yang sepadan dalam lajur masa untuk dijalankan.
4)、Mode3:Mod langkah: dalam antara muka pengaturcaraan, had sudut maksimum / minimum ditetapkan kepada 0, dan mod operasi ditetapkan kepada 3. Tukar ke mod langkah. Masukkan kedudukan dalam bar kedudukan untuk melangkah ke arah kedudukan sasaran. Klik kedudukan sekali lagi untuk terus melangkah ke arah yang sama.
4、Mod berbilang pusingan, kawalan mutlak dan maklum balas 360 darjah, di bawah ketepatan tertinggi, kawalan kedudukan mutlak boleh tambah atau tolak 7 pusingan, tetapi bilangan kitaran kuasa tidak disimpan, hanya nilai maklum balas kedudukan mutlak dikekalkan.
5、Satu penentukuran kekunci, pemasangan sudut 360 darjah pada sebarang kedudukan, (40 (perpuluhan) input alamat 128 (perpuluhan)) satu kedudukan semasa pembetulan kekunci ialah tengah (2048 (perpuluhan)).
6、Tahap komunikasi TTL, komunikasi tak segerak separuh dupleks, sokongan protokol bas untuk melaraskan parameter baca dan tulis, dan tambah fungsi baca segerak (hantar arahan untuk menerima arahan baca balik daripada setiap servo pada bas secara bergilir-gilir.)
7、Perlindungan berbilang, (lebih beban, arus lebih, voltan lampau, terlalu panas, tetapan suis, perubahan parameter keadaan)
1)、Perlindungan beban lampau: melalui pengesanan kedudukan, semasa pergerakan dari kedudukan permulaan ke kedudukan sasaran, apabila kedudukan semasa dikesan bukan kedudukan sasaran selepas menghadapi halangan halangan, daya pemunggahan berlangsung selama 2S (20% daripada daya penyekat lalai). Sehingga arahan baharu dicetuskan, Perlindungan pelepasan
2)、Perlindungan arus lampau: melalui nilai semasa yang ditetapkan, semak sama ada arus mencapai nilai semasa yang ditetapkan. Apabila ia mencapai nilai semasa yang ditetapkan, lepaskan daya (torsi lalai ialah 0). Sehingga arahan baharu dicetuskan, Perlindungan pelepasan
3)、Perlindungan voltan lebih: mengesan nilai voltan semasa. Jika ia melebihi nilai voltan yang ditetapkan, penggera akan memaparkan lebihan voltan.
4)、Perlindungan terlalu panas: mengesan suhu motor semasa. Jika suhu melebihi nilai yang ditetapkan, penggera akan memaparkan terlalu panas.
8:Maklum balas berbilang:
1) Maklum balas beban: output kawalan semasa memacu kitaran tugas voltan motor, dan skala penuh ialah 1000 = 100% keluaran tork.
2) Maklum balas semasa: Arus kerja servo, 1 = 6.5mA
3) Maklum balas voltan: Voltan kerja servo,70=7V,0.1V
4) Maklum balas suhu: suhu kerja dalaman servo semasa (suhu pengukur) 。
5) Maklum balas kelajuan: maklum balas kelajuan putaran motor semasa, dan bilangan langkah dalam masa unit (sesaat)
9、Buka parameter PID.
1.Fungsi henti permulaan pecutan: nilai kelajuan dan pecutan boleh ditetapkan, kesan gerakan lebih lembut.
2.Ketepatan tinggi, 360 darjah kedudukan mutlak ketepatan bit 4096, resolusi kedudukan tertinggi ialah 0.088 darjah, jika kawalan adalah 90 darjah, input 4096 / 360 * 90 = 1024, jika kawalan adalah 180 darjah, input 4096 / 360 * 180 = 2048, untuk mengira .
3.Terdapat empat pensuisan mod berfungsi (servo kedudukan mod 0, gelung tertutup kelajuan mod 1, gelung buka kelajuan mod 2, servo langkah 3 mod).
1)、 Mod 0:Mod lokasi, mod lalai. Dalam mod ini, kawalan sudut mutlak 360 darjah boleh direalisasikan. Menyokong pergerakan pecutan.
2)、Mod 1:Kelajuan gelung tertutup, dalam antara muka pengaturcaraan, mod operasi ditetapkan kepada 1, tukar ke mod gelung tertutup kelajuan, dan masukkan kelajuan yang sepadan dalam lajur kelajuan untuk dijalankan .
3)、Mod 2:Kelajuan gelung terbuka, dalam antara muka pengaturcaraan, mod operasi ditetapkan kepada 2, tukar kepada mod gelung terbuka laju dan masukkan masa yang sepadan dalam lajur masa untuk dijalankan.
4)、Mode3:Mod langkah: dalam antara muka pengaturcaraan, had sudut maksimum / minimum ditetapkan kepada 0, dan mod operasi ditetapkan kepada 3. Tukar ke mod langkah. Masukkan kedudukan dalam bar kedudukan untuk melangkah ke arah kedudukan sasaran. Klik kedudukan sekali lagi untuk terus melangkah ke arah yang sama.
4、Mod berbilang pusingan, kawalan mutlak dan maklum balas 360 darjah, di bawah ketepatan tertinggi, kawalan kedudukan mutlak boleh tambah atau tolak 7 pusingan, tetapi bilangan kitaran kuasa tidak disimpan, hanya nilai maklum balas kedudukan mutlak dikekalkan.
5、Satu penentukuran kekunci, pemasangan sudut 360 darjah pada sebarang kedudukan, (40 (perpuluhan) input alamat 128 (perpuluhan)) satu kedudukan semasa pembetulan kekunci ialah tengah (2048 (perpuluhan)).
6、Tahap komunikasi TTL, komunikasi tak segerak separuh dupleks, sokongan protokol bas untuk melaraskan parameter baca dan tulis, dan tambah fungsi baca segerak (hantar arahan untuk menerima arahan baca balik daripada setiap servo pada bas secara bergilir-gilir.)
7、Perlindungan berbilang, (lebih beban, arus lebih, voltan lampau, terlalu panas, tetapan suis, perubahan parameter keadaan)
1)、Perlindungan beban lampau: melalui pengesanan kedudukan, semasa pergerakan dari kedudukan permulaan ke kedudukan sasaran, apabila kedudukan semasa dikesan bukan kedudukan sasaran selepas menghadapi halangan halangan, daya pemunggahan berlangsung selama 2S (20% daripada daya penyekat lalai). Sehingga arahan baharu dicetuskan, Perlindungan pelepasan
2)、Perlindungan arus lampau: melalui nilai semasa yang ditetapkan, semak sama ada arus mencapai nilai semasa yang ditetapkan. Apabila ia mencapai nilai semasa yang ditetapkan, lepaskan daya (torsi lalai ialah 0). Sehingga arahan baharu dicetuskan, Perlindungan pelepasan
3)、Perlindungan voltan lebih: mengesan nilai voltan semasa. Jika ia melebihi nilai voltan yang ditetapkan, penggera akan memaparkan lebihan voltan.
4)、Perlindungan terlalu panas: mengesan suhu motor semasa. Jika suhu melebihi nilai yang ditetapkan, penggera akan memaparkan terlalu panas.
8:Maklum balas berbilang:
1) Maklum balas beban: output kawalan semasa memacu kitaran tugas voltan motor, dan skala penuh ialah 1000 = 100% keluaran tork.
2) Maklum balas semasa: Arus kerja servo, 1 = 6.5mA
3) Maklum balas voltan: Voltan kerja servo,70=7V,0.1V
4) Maklum balas suhu: suhu kerja dalaman servo semasa (suhu pengukur) 。
5) Maklum balas kelajuan: maklum balas kelajuan putaran motor semasa, dan bilangan langkah dalam masa unit (sesaat)
9、Buka parameter PID.
Related Collections






