


MODUL MOTOR TORK TINGGI HTDW-5047 50mm 12-48V PENYANDI 14-bit NISBAH 9/20/36
MODUL MOTOR TORK TINGGI HTDW-5047 50mm 12-48V PENYANDI 14-bit NISBAH 9/20/36
HIGH TORQUE
Tidak dapat memuatkan ketersediaan pengambilan
Tinjauan
Motor HIGH TORQUE HTDW-5047 adalah siri modul motor tork tinggi yang padat yang ditawarkan dalam tiga nisbah pengurangan (9 / 20 / 36). Ia mempunyai resolusi pengod input/output 14-bit, julat voltan 12-48V, dan frekuensi kawalan 3kHz untuk kawalan gerakan dan sendi robotik.
Ciri Utama
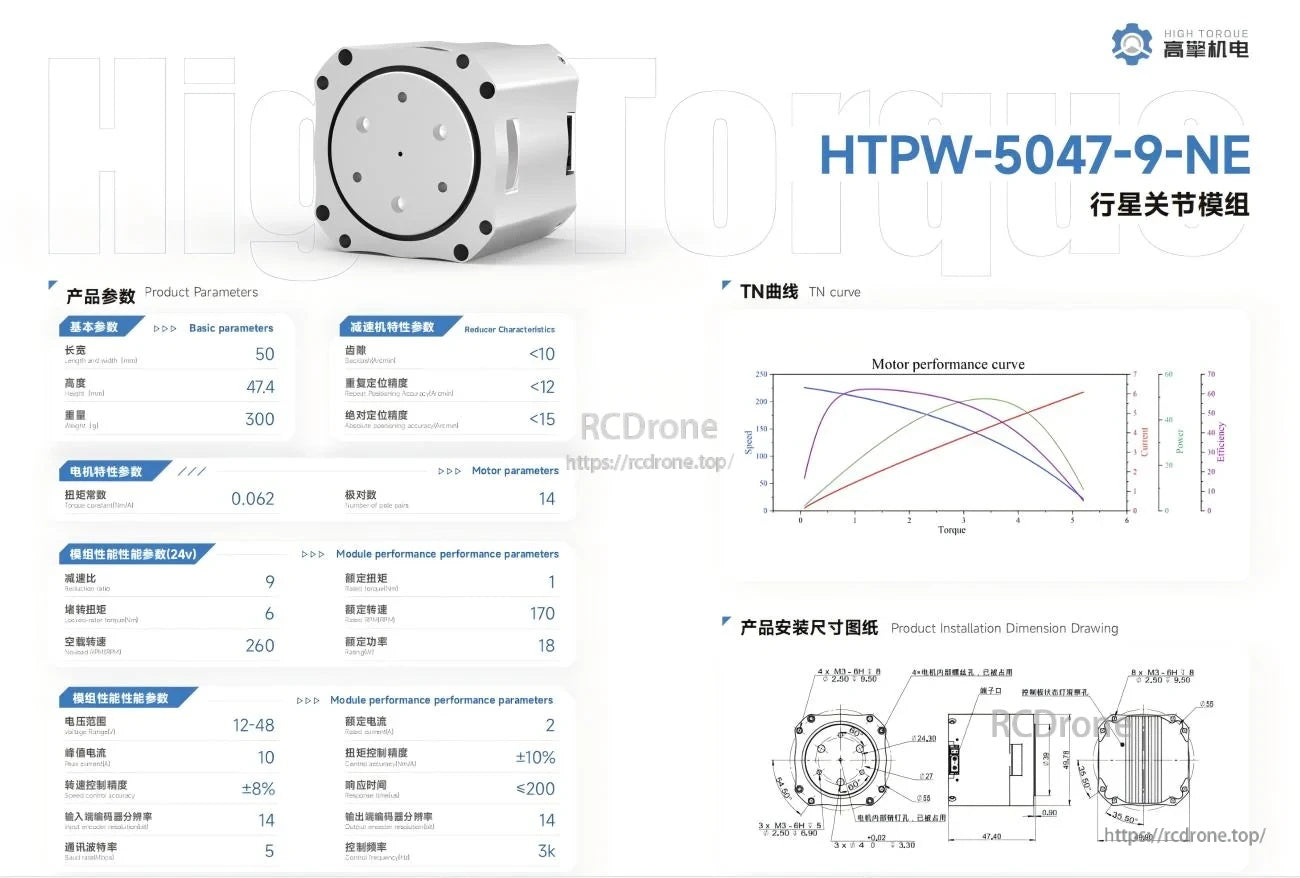
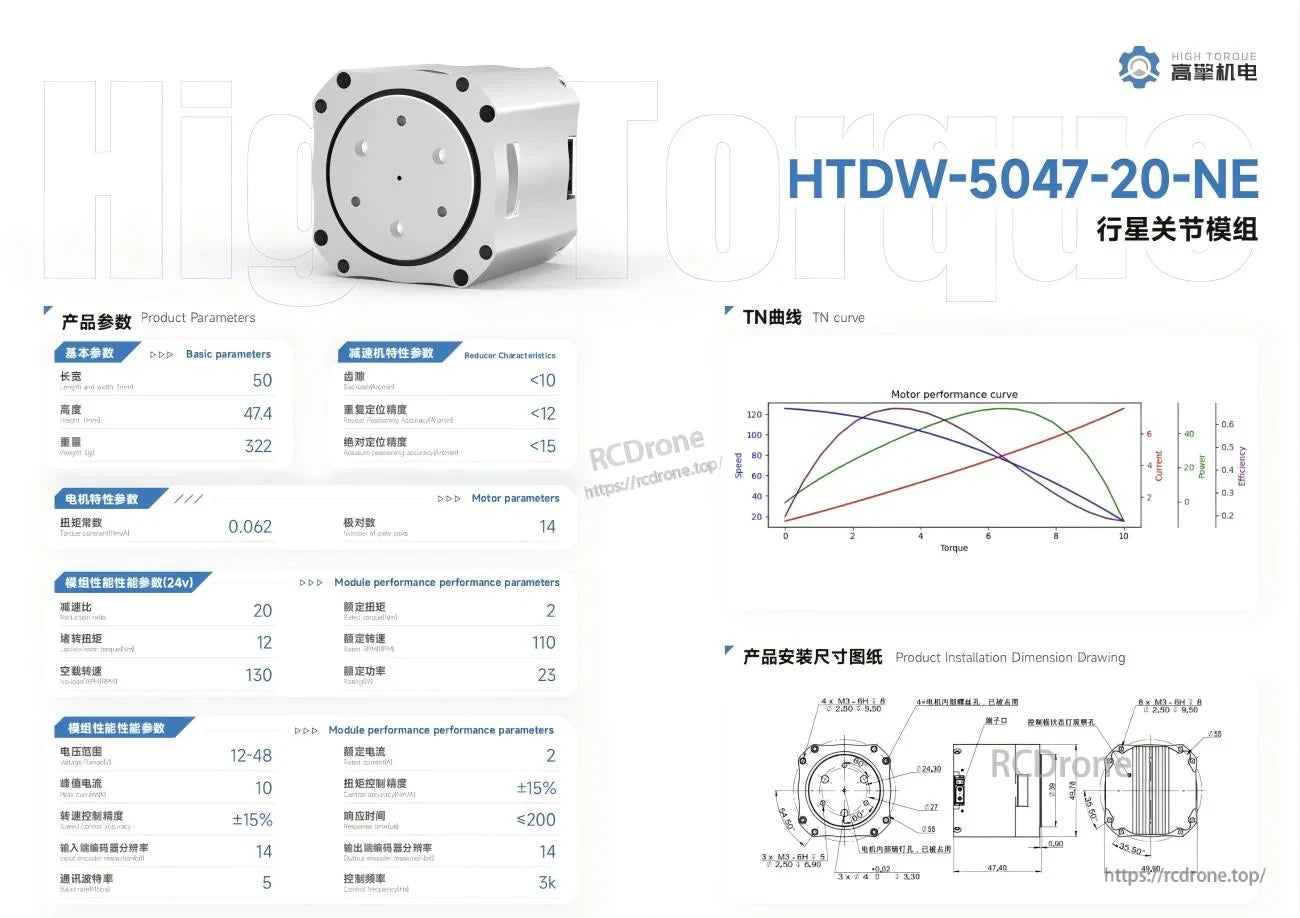
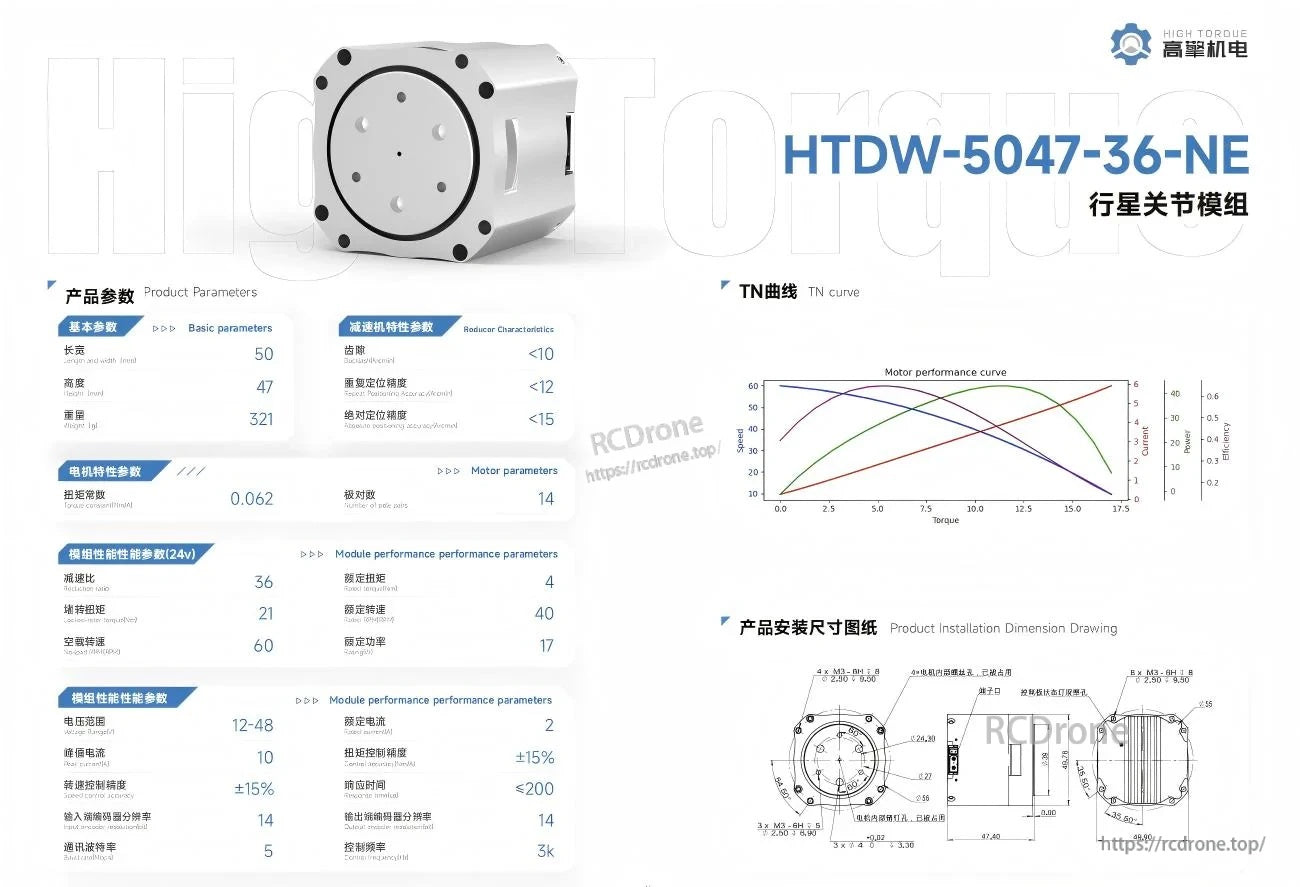
- Model: HTDW-5047-9-NE / HTDW-5047-20-NE / HTDW-5047-36-NE
- Backlash rendah: <10 Arcmin
- Ketepatan pengulangan penempatan: <12 Arcmin; ketepatan penempatan mutlak: <15 Arcmin
- Resolusi pengod: 14-bit (input) dan 14-bit (output)
- Kadar baud: 5 Mbps; masa tindak balas: ≤200 us
Spesifikasi
| Parameter | HTDW-5047-9-NE | HTDW-5047-20-NE | HTDW-5047-36-NE |
|---|---|---|---|
| Panjang dan lebar | 50mm | 50mm | 50mm |
| Ketinggian | 47.4mm | 47.4mm | 47mm |
| Berat | 300g | 322g | 321g |
| Backlash | <10 Arcmin | <10 Arcmin | <10 Arcmin |
| Ketepatan penentuan semula | <12 Arcmin | <12 Arcmin | <12 Arcmin |
| Ketepatan penentuan mutlak | <15 Arcmin | <15 Arcmin | <15 Arcmin |
| Konsisten tork | 0.062 Nm/A | 0.062 Nm/A | 0.062 Nm/A |
| Bilangan pasangan tiang | 14 | 14 | 14 |
| Ratio pengurangan | 9 | 20 | 36 |
| Torque kunci-rotor | 6 Nm | 12 Nm | 21 Nm |
| RPM tanpa beban | 260 RPM | 130 RPM | 60 RPM |
| Torque yang dinilai | 1 Nm | 2 Nm | 4 Nm |
| RPM yang dinilai | 170 RPM | 110 RPM | 40 RPM |
| Peringkat | 18 W | 23 W | 17 W |
| Julat voltan | 12-48V | 12-48V | 12-48V |
| Arus puncak | 10 A | 10 A | 10 A |
| Ketepatan kawalan kelajuan | ±8% | ±15% | ±15% |
| Resolusi pengkod input | 14-bit | 14-bit | 14-bit |
| Kadar baud | 5 Mbps | 5 Mbps | 5 Mbps |
| Arus yang dinilai | 2 A | 2 A | 2 A |
| Ketepatan kawalan | ±10% | ±15% | ±15% |
| Masa tindak balas | ≤200 us | ≤200 us | ≤200 us |
| Resolusi pengkod output | 14-bit | 14-bit | 14-bit |
| Kekerapan kawalan | 3 kHz | 3 kHz | 3 kHz |
Untuk panduan pemilihan dan sokongan selepas jualan, hubungi [email protected] or lawati https://rcdrone.top/.
Permohonan
- Robot humanoid
- Tangan robot
- Exoskeleton
- Robot berkaki empat
- Kenderaan AGV
- Robot ARU
Manual
- HTDW-5047-9-NE HIGH TORQUE Motor Debugging Assistant User manual (PDF)
- HTDW-5047-20-NE HIGH TORQUE Motor Debugging Assistant User manual (PDF)
- HTDW-5047-36-NE HIGH TORQUE Motor Debugging Assistant User manual (PDF)
- HTDW-5047-9-NE Manual Debugging (PDF)
- HTDW-5047-20-NE Manual Debugging (PDF)
- HTDW-5047-36-NE Manual Debugging (PDF)
- HTDW-5047-9-NE 1.2 fdcan Analisis Protokol (PDF)
- HTDW-5047-20-NE 1.2 fdcan Analisis Protokol (PDF)
- HTDW-5047-36-NE 1.2 fdcan Analisis Protokol (PDF)
- Model 3D Motor HTDW-5047-9-NE (STP, ZIP)
- Model 3D Motor HTDW-5047-20-NE (STP, ZIP)
- Model 3D Motor HTDW-5047-36-NE (STP, ZIP)
- Manual Pengguna HTDW-5047 (PDF)
Butiran

J siri HTDW-5047 menggabungkan faktor bentuk kompak 50mm dengan tork tinggi untuk sendi robotik dan kawalan gerakan.
Pilih versi pengurangan 9:1 apabila kelajuan yang lebih tinggi diutamakan sambil mengekalkan jejak modul yang sama.
Pilihan pengurangan 20:1 mengimbangi kelajuan dan tork untuk sendi dan penggerak robotik tujuan umum.
Varian pengurangan 36:1 sesuai untuk sendi berkelajuan rendah dan tork lebih tinggi di mana penentuan kedudukan yang tepat adalah kritikal.
Related Collections


