

Modul Motor TORK TINGGI HTDW-6056-36-NE, Pengurangan 36:1, 10Nm Dinilai, 12-48V, Pengekod 14-bit
Modul Motor TORK TINGGI HTDW-6056-36-NE, Pengurangan 36:1, 10Nm Dinilai, 12-48V, Pengekod 14-bit
HIGH TORQUE
Harga biasa
$335.40 USD
Harga biasa
Harga jualan
$335.40 USD
Harga seunit
per
Taxes included.
Penghantaran dikira semasa pembayaran.
Tidak dapat memuatkan ketersediaan pengambilan
Tinjauan
Motor HIGH TORQUE HTDW-6056-36-NE adalah modul motor tork tinggi dengan nisbah pengurangan 36, direka untuk aplikasi sendi dan penggerak robotik yang memerlukan output kelajuan rendah yang terkawal. Parameter operasi utama termasuk input 12-48V, tork terperingkat 10Nm pada 50RPM, dan tork rotor terkunci 36Nm.
Ciri Utama
- Penandaan model: HTDW-6056 / HTDW-6056-36-NE
- Ratio pengurangan: 36
- Backlash rendah dan prestasi penentuan kedudukan: backlash <10Arcmin; ketepatan penentuan kedudukan berulang <12Arcmin; ketepatan penentuan kedudukan mutlak <15Arcmin
- Resolusi pengodok: pengodok input 14-bit; pengodok output 14-bit
- Parameter kawalan/komunikasi: kadar baud 5Mbps; frekuensi kawalan 3kHz; masa tindak balas ≤200us
Spesifikasi
| Panjang dan Lebar | 60mm |
| Ketinggian | 56mm |
| Berat | 565g |
| Backlash | <10Arcmin |
| Ketepatan Penentuan Kedudukan Berulang | <12Arcmin |
| Ketepatan Penentuan Kedudukan Mutlak | <15Arcmin |
| Konstanta Tork | / |
| Bilangan Pasangan Tiang | 14 |
| Ratio Pengurangan | 36 |
| Torque Kunci-rotor | 36Nm |
| RPM Tanpa Beban | 60RPM |
| Torque Dinilai | 10Nm |
| RPM Dinilai | 50RPM |
| Peringkat | 52W |
| Julat Voltan | 12-48V |
| Arus Puncak | 10A |
| Ketepatan Kawalan Kelajuan | ±10% |
| Resolusi Pengodok Input | 14-bit |
| Kadar Baud | 5Mbps |
| Arus Dinilai | 3A |
| Ketepatan Kawalan | ±20% |
| Masa Tindak Balas | ≤200us |
| Output Encoder Resolution | 14-bit |
| Frekuensi Kawalan | 3kHz |
Aplikasi
- Robot humanoid
- Tangan robot
- Exoskeleton
- Robot quadruped
- Kenderaan AGV
- Robot ARU
Untuk pertanyaan integrasi dan pengesahan pra-jualan, hubungi sokongan di https://rcdrone.top/ atau emel [email protected] .
Manual
- Panduan Pengguna Pembantu Penyahpepijatan Motor TORK TINGGI (PDF)
- Panduan Penyahpepijatan (PDF)
- 1.2 Analisis Protokol FDCAN (PDF)
- Panduan Pengguna (PDF)
- Rajah Struktur Produk HTDW-6056-36-NE (PDF)
- Model 3D Motor TORK TINGGI HTDW-6056-36-NE (STP)
Butiran

Sebuah modul motor sendi tork tinggi yang padat dibina untuk output penggerak robotik berkelajuan rendah yang terkawal.
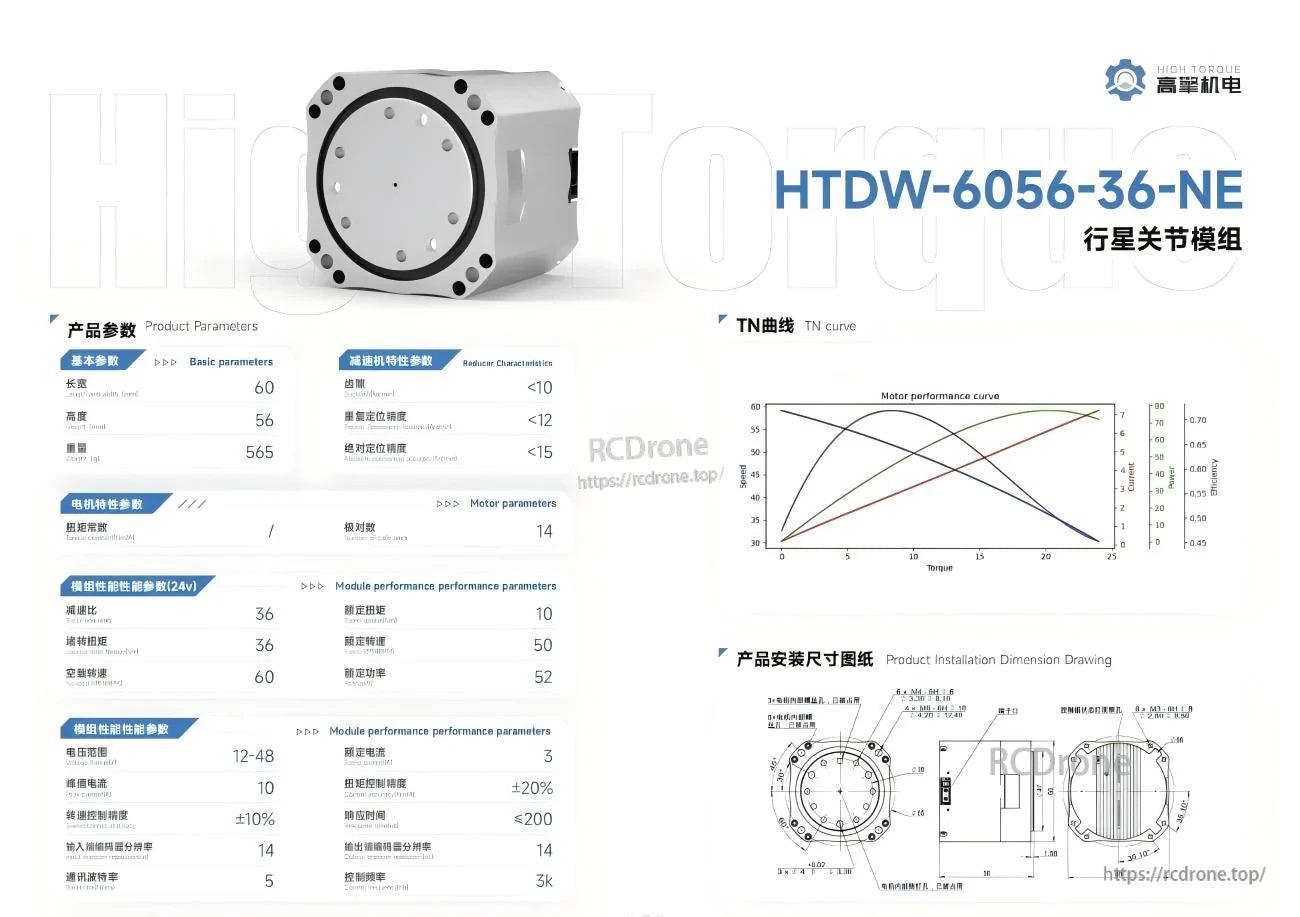
Spesifikasi utama, lengkung tork-pantasan, dan dimensi pemasangan telah disatukan untuk integrasi mekanikal yang lebih cepat.
Related Collections

