Modul GPS Holybro DroneCAN M8N - Pemproses STM32G4 BMM150 Kompas Sokongan 3GNSS Protokol DroneCAN
Modul GPS Holybro DroneCAN M8N - Pemproses STM32G4 BMM150 Kompas Sokongan 3GNSS Protokol DroneCAN
HolyBro
Tidak dapat memuatkan ketersediaan pengambilan
Penerangan
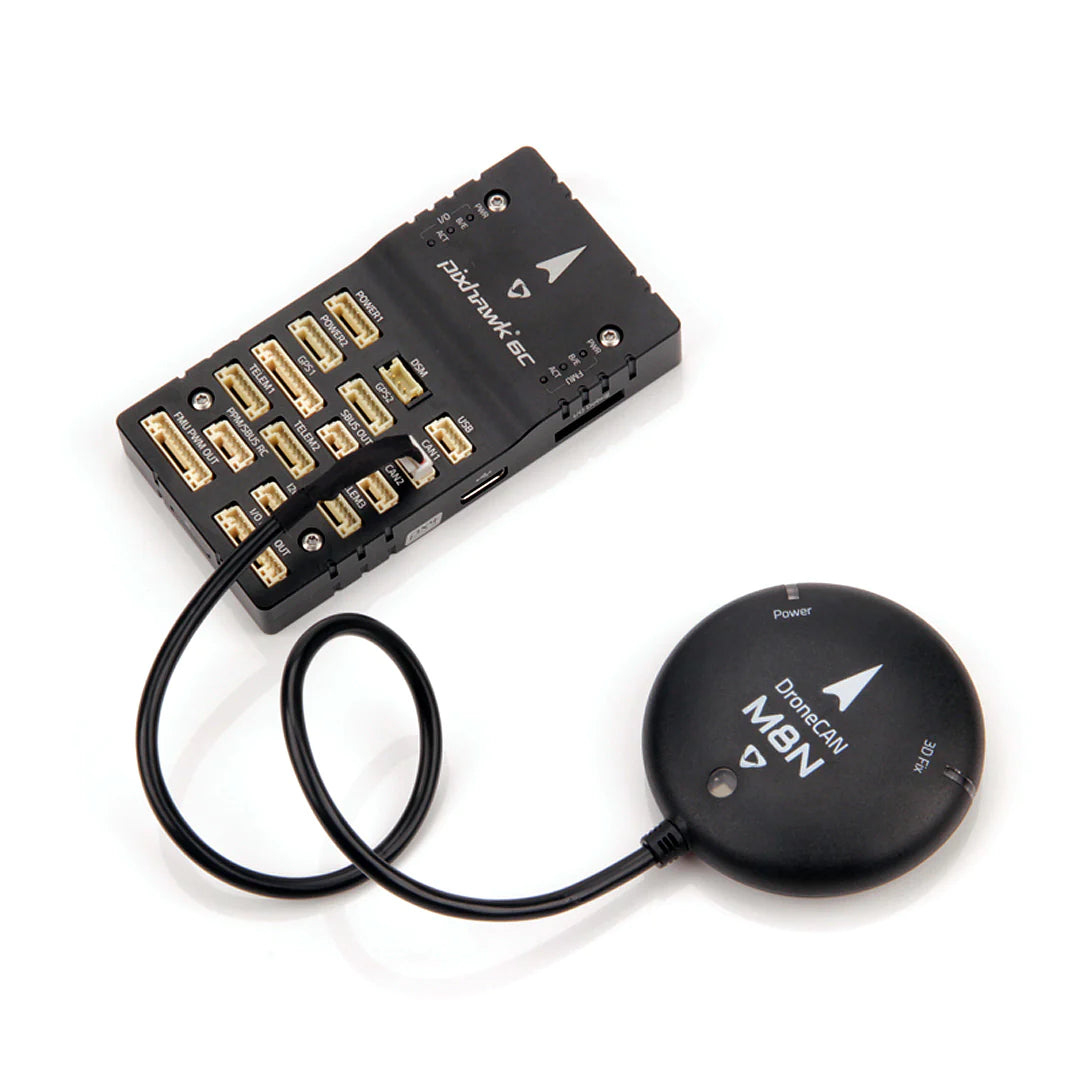
GPS Holybro DroneCAN mempunyai modul UBLOX M8N atau M9N, kompas BMM150, penunjuk LED tiga warna. Ia mempunyai Pemproses STM32G4 dan menggunakan protokol DroneCAN untuk komunikasi, menjadikannya lebih dipercayai dan lebih baik dalam menangani gangguan elektromagnet berbanding sambungan bersiri. Ia tidak menduduki mana-mana port bersiri pengawal penerbangan, dan peranti CAN yang berbeza boleh disambungkan ke bas CAN yang sama melalui papan pembahagi CAN.
Spesifikasi:
| DroneCAN M8N | |
| Penerima GNSS | Ublox NEO M8N |
| Bilangan GNSS Serentak | Sehingga 3 GNSS (GPS, Galileo, GLONASS, BeiDou) |
| Pemproses | STM32G4 (170MHz, 512K FLASH) |
| Kompas | BMM150 |
| Jalur Frekuensi | GPS: L1C/A GLONASS: L10F Beidou: B1I Galileo: E1B/C |
| Sistem Pembesaran GNSS | SBAS: WAAS, EGNOS, MSAS, QZSS |
| Kemas Kini Navigasi | 5Hz Lalai(10Hz MAX) |
| Ketepatan | 2.5m |
| Ketepatan Kelajuan | 0.05 m/s |
| # Maksimum Satelit | 22+ |
| Protokol Komunikasi | DroneCAN @ 1 Mbit/s |
| Menyokong Autopilot FW | PX4, Ardupilot |
| Jenis Port | GHR-04V-S |
| Antena | 25 x 25 x 4 mm tampalan antena seramik |
| Penggunaan kuasa | Kurang daripada 200mA @ 5V |
| Voltan | 4.7-5.2V |
| Suhu Pengendalian | -40~80C |
| Saiz | Diameter: 54mm Tebal: 14.5mm |
| Berat | 36g |
| Panjang Kabel | 26sm |
| Nota Lain | - Penguat RF LNA MAX2659ELT+ - Kapasitans Farah boleh dicas semula - Pengatur 3.3V hingar rendah |
Untuk maklumat teknikal lain, sila pergi ke https://docs.holybro.com/
DroneCAN
DroneCAN ialah protokol CAN utama yang digunakan oleh projek ArduPilot dan PX4 untuk komunikasi dengan peranti CAN. Ia ialah protokol terbuka dengan komunikasi terbuka, spesifikasi dan pelbagai pelaksanaan terbuka.
Pembangunan DroneCAN
Projek DroneCAN mempunyai komuniti pembangunan yang aktif.
- perbincangan mengenai perselisihan di https://dronecan.org/discord
- pembangunan pada github di https://github.com/DroneCAN
Related Collections