Holybro Pixhawk 6X (ICM-45686) Pengawal Penerbangan – IMU Tiga Ganda, STM32H753, Ethernet, Serasi PX4 & ArduPilot
Holybro Pixhawk 6X (ICM-45686) Pengawal Penerbangan – IMU Tiga Ganda, STM32H753, Ethernet, Serasi PX4 & ArduPilot
HolyBro
Tidak dapat memuatkan ketersediaan pengambilan
Gambaran
Ciri Utama
-
Redundansi IMU Tiga Kali: 3x ICM-45686 IMUs (±32g) dengan teknologi BalancedGyro™ untuk navigasi inersia yang tahan ralat
-
Barometer Dwi: ICP20100 dan BMP388 untuk ketepatan ketinggian yang lebih baik
-
Pemproses Berkelajuan Tinggi: STM32H753 Cortex-M7, 480MHz, dengan 2MB Flash & 1MB RAM
-
Reka Bentuk Modular: Memisahkan FMU, IMU, dan papan asas, disambungkan melalui 100-pin & 50-pin Pixhawk® Bus
-
Papan IMU Terkawal Suhu: Memastikan prestasi sensor yang optimum merentasi julat suhu
-
Integrasi Ethernet: Menyokong komunikasi berkelajuan tinggi dengan komputer misi
-
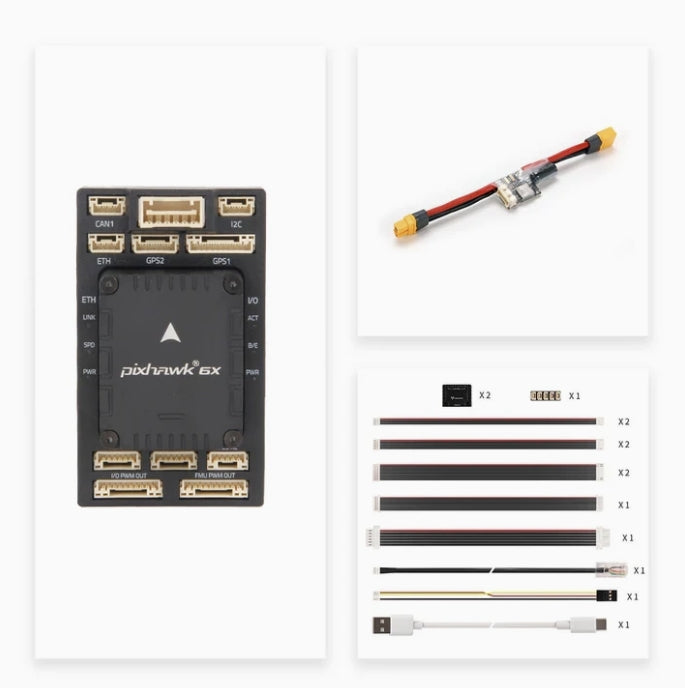
Sokongan Modul Kuasa Digital: Memberikan pengukuran voltan dan arus yang lebih tepat
Sistem Pengasingan Lanjutan: Bahan yang tahan lama dan diformulasikan khas memberikan penyerapan getaran spektrum tinggi
-
Keserasian Firmware: Dihantar dengan PX4 (v1.14.3+), menyokong ArduPilot (v4.5.0+)
Spesifikasi
Pemproses & Sensor
| Komponen | Butiran |
|---|---|
| Pemproses FMU | STM32H753, ARM Cortex-M7, 480MHz, 2MB Flash, 1MB RAM |
| Pemproses IO | STM32F103, ARM Cortex-M3, 72MHz |
| Sensor IMU | 3x ICM-45686 (BalancedGyro™) |
| Barometer | ICP20100 & BMP388 |
| Magnetometer | BMM150 |
| Elemen Selamat | NXP SE050 Plug & Trust |
Parameter Elektrik
| Parameter | Value |
|---|---|
| Voltan Masukan Maks | 6V |
| Masukan Kuasa USB | 4.75~5.25V |
| Voltan Rel Servo | 0~36V |
| Had Arus Telem1 & GPS2 | 1.5A gabungan |
| Had Arus Port Lain | 1.5A gabungan |
| Voltan Isyarat PWM | Default 3.3V (boleh ditukar kepada 5V melalui resistor) |
| Suasana Operasi | -25°C hingga +85°C |
Dimensi Mekanikal & Berat
| Komponen | Dimensi (mm) | Berat (g) |
|---|---|---|
| Pengawal Penerbangan | 38.8 x 31.8 x 16.8 | 31.3g |
| Papan Asas Standard | 52.4 x 102 x 16.7 | 72.5g |
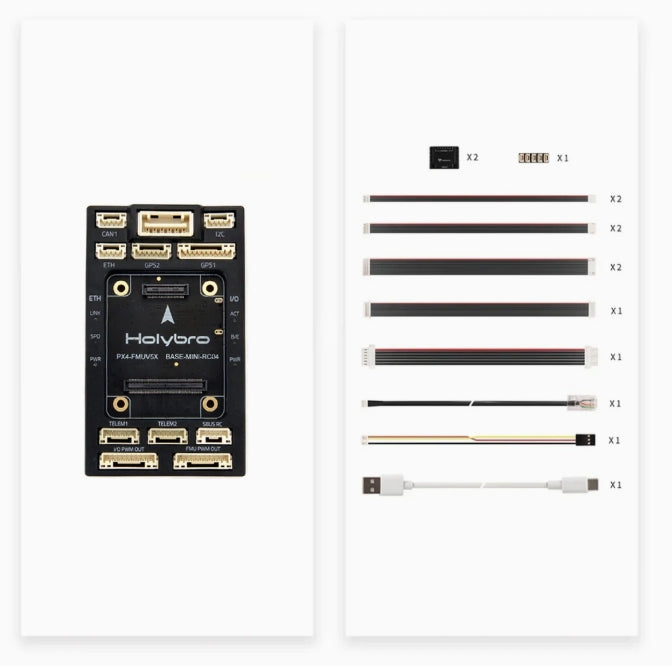
| Papan Dasar Mini | 43.4 x 72.8 x 14.2 | 26.5g |
Keserasian Firmware
-
PX4: Disokong sepenuhnya dari versi 1.14.3 dan ke atas
-
ArduPilot: Disokong sepenuhnya dari versi 4.5.0 dan ke atas
-
Penggandaan firmware disokong melalui Mission Planner atau QGroundControl
Aplikasi
Ideal untuk integrasi ke dalam:
-
Dron industri
-
Sistem UAV komersial
-
Pesawat VTOL
-
Platform penyelidikan akademik
-
Misi multi-sensor dan kebolehpercayaan tinggi
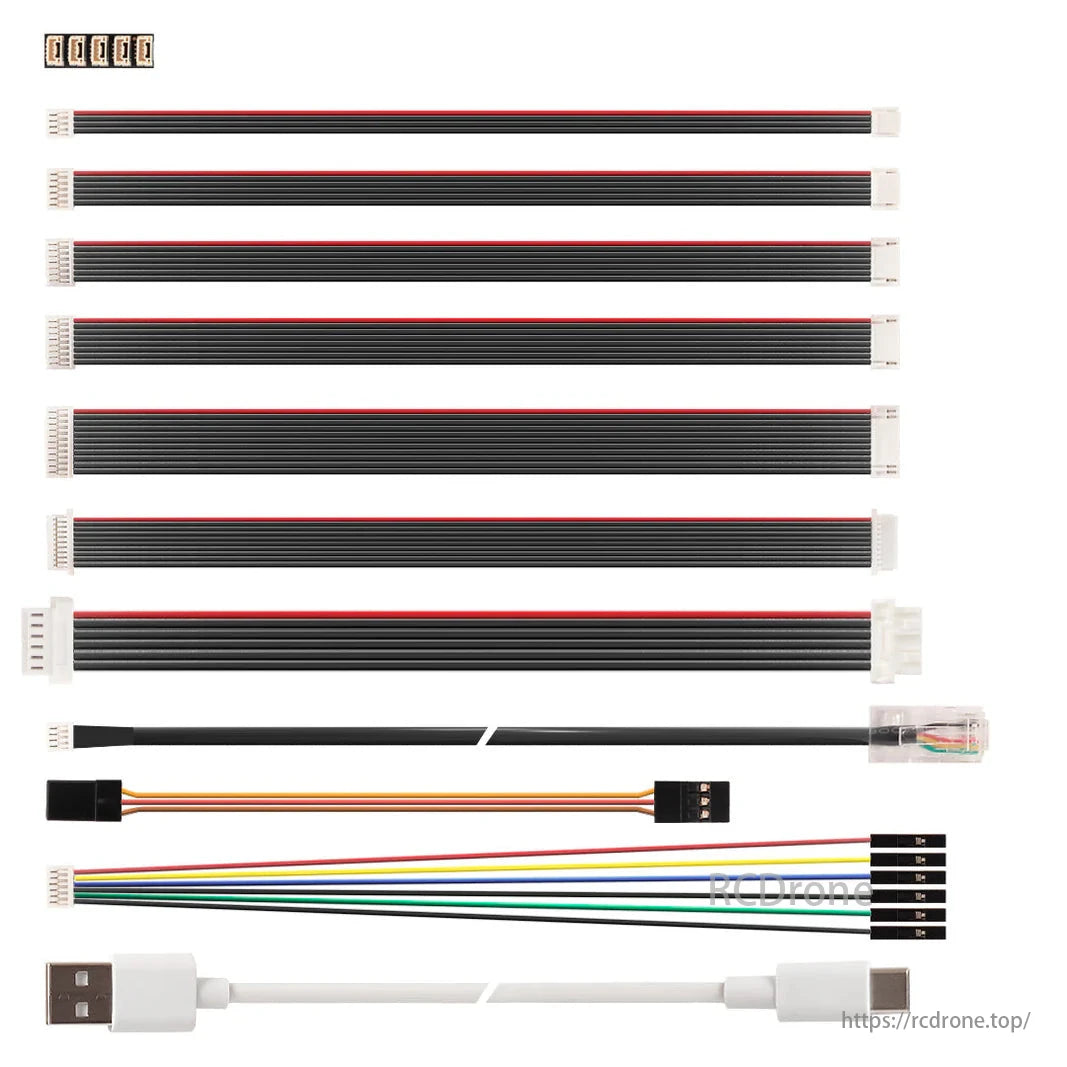
Butiran

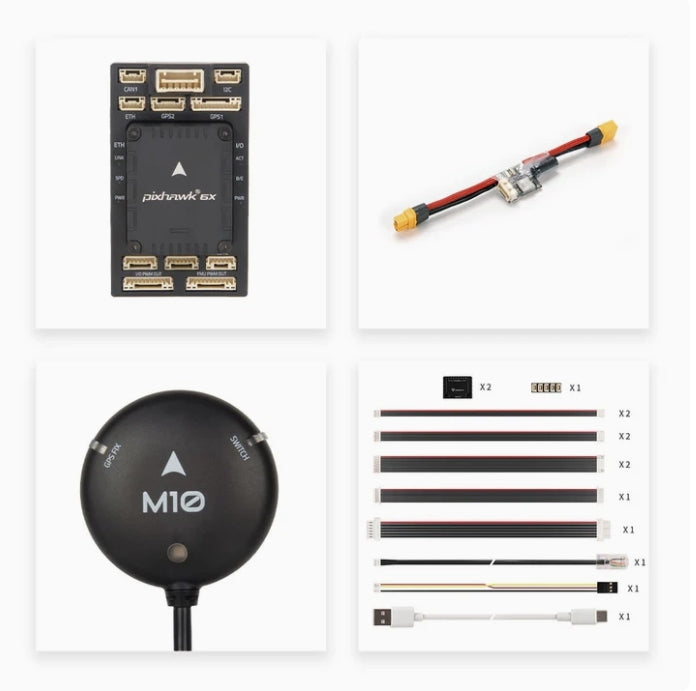
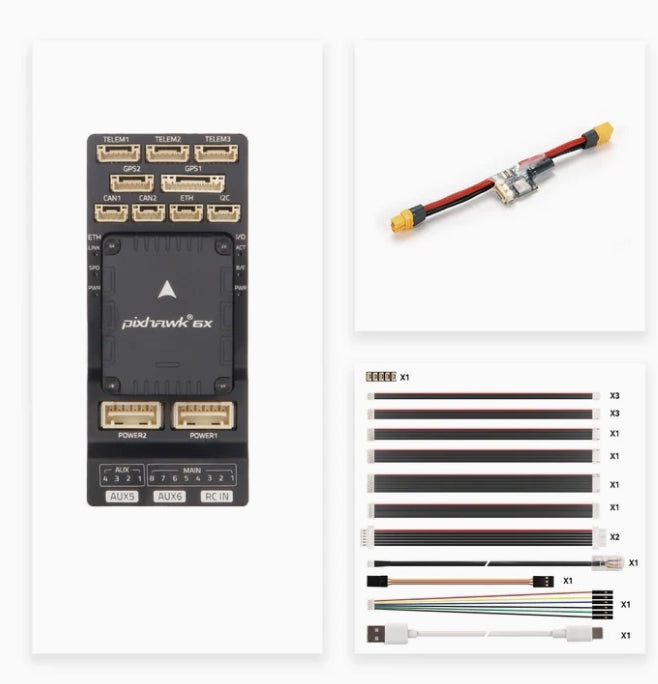
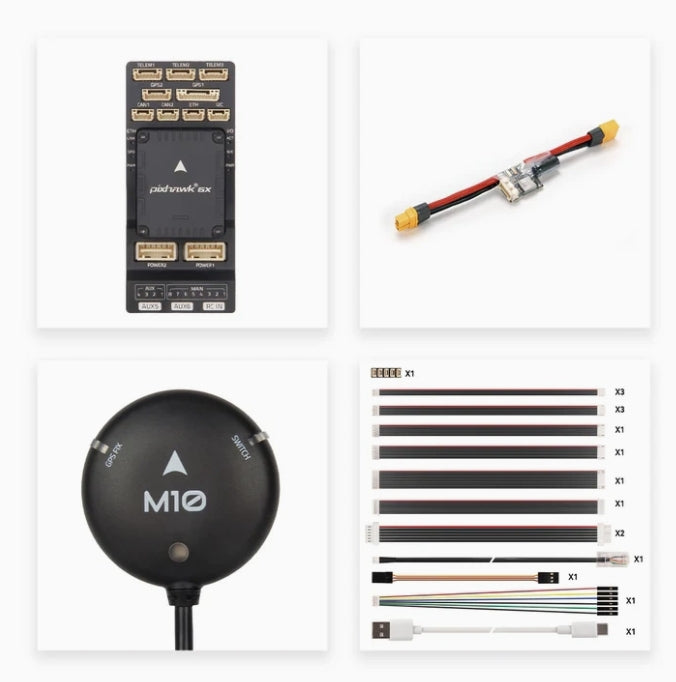
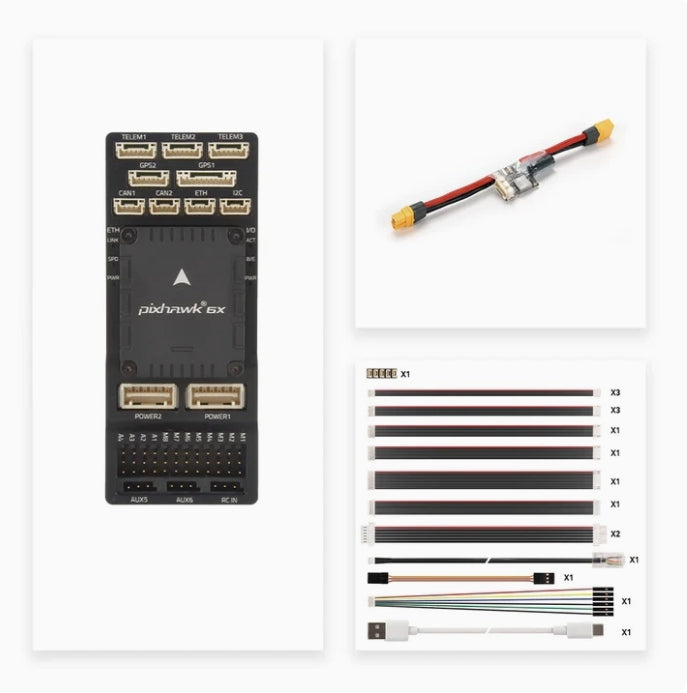
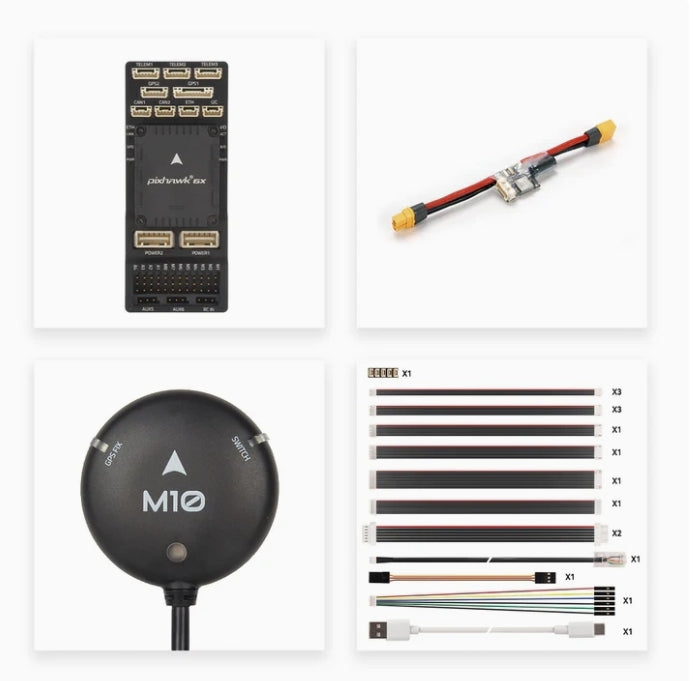
Pixhawk 6X menawarkan reka bentuk yang lebih langsing dengan dua model. Ia mempunyai header pin yang dipertingkatkan untuk sambungan dan prestasi yang lebih baik, menjadikannya ideal untuk aplikasi lanjutan. Pilih model yang tepat untuk keperluan anda.
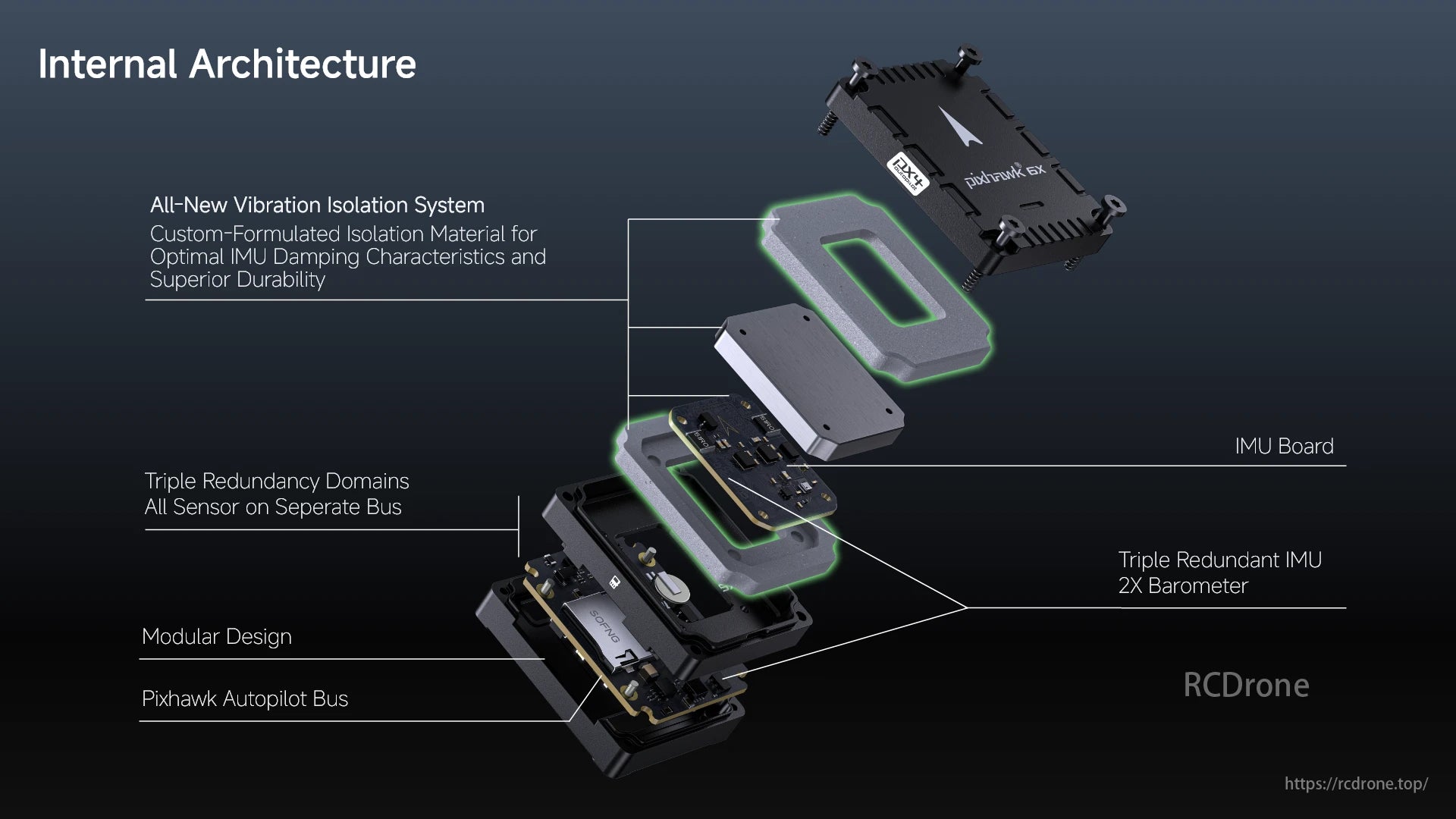
Holybro Pixhawk 6X menawarkan pengasingan getaran, redundansi tiga kali ganda, reka bentuk modular, bas autopilot, papan IMU, dan 2x barometer untuk prestasi yang lebih baik.
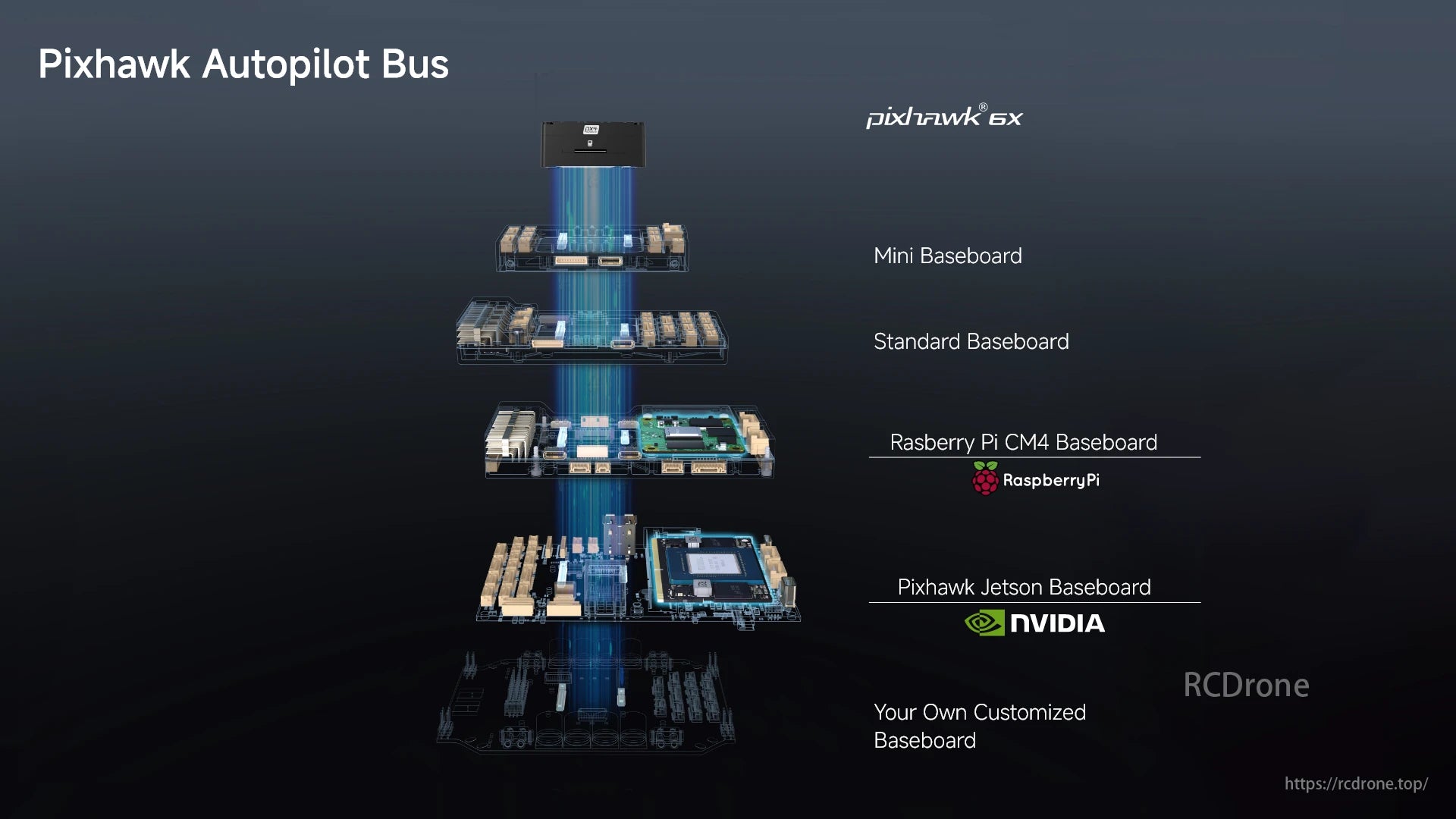
Pixhawk Bas Autopilot termasuk Pixhawk 6X, Papan Asas Mini, Papan Asas Standard, Papan Asas Raspberry Pi CM4, Papan Asas Jetson, dan pilihan khusus.

Resistor pampasan suhu, IMU & barometer redundan, teknologi sensor yang pelbagai, dan bahan pengasingan memastikan ketepatan.

Bas Autopilot Pixhawk, Pemproses STM H753 32-Bit (480 MHz), Invensense ICM45686 IMU dengan Teknologi BalancedGyro, dan Elemen Selamat NXP EdgeLock SE050 diintegrasikan ke dalam Papan FMU.
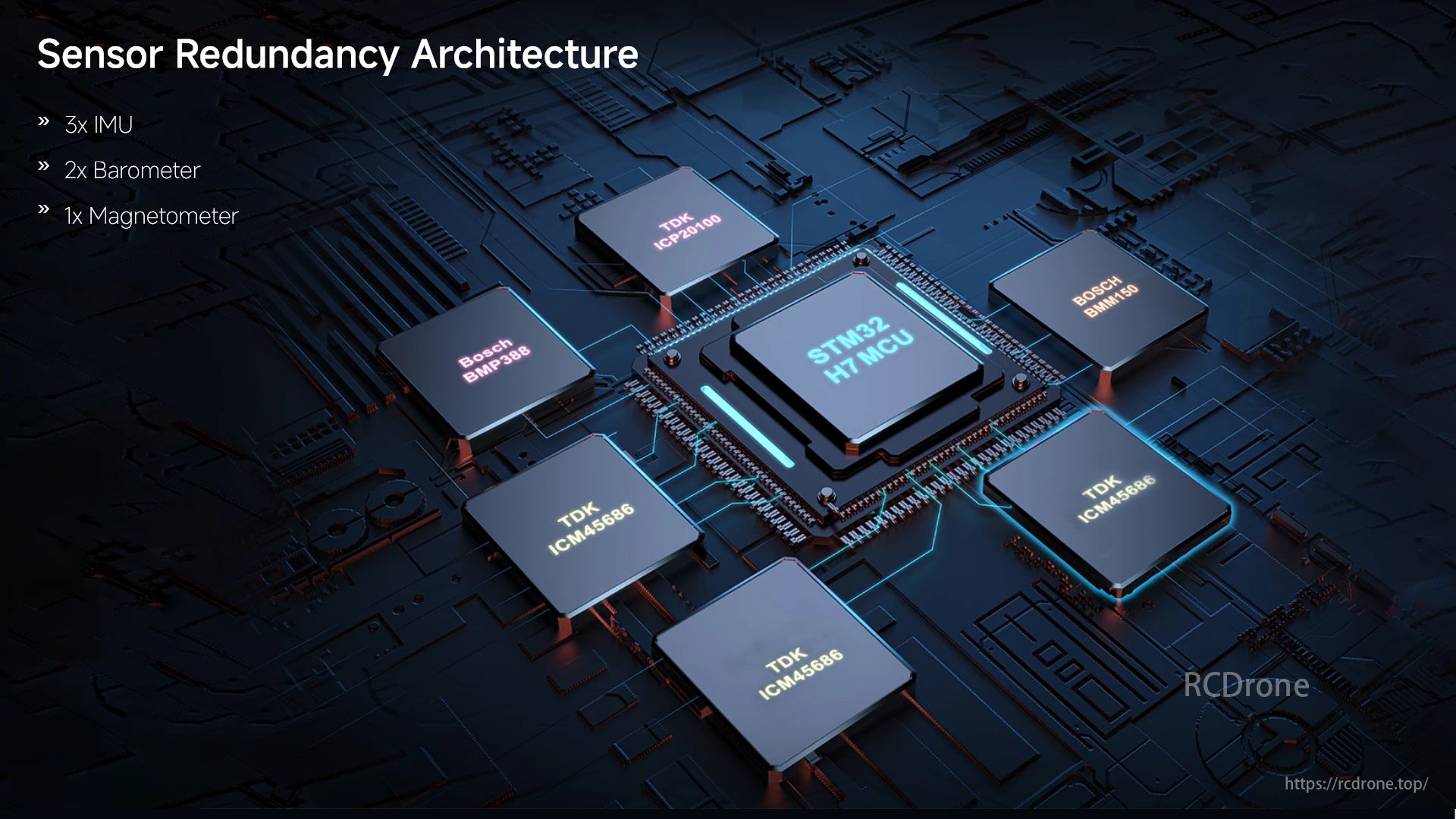
Arsitektur redundansi sensor dengan 3x IMU, 2x barometer, dan 1x magnetometer.Ciri-ciri STM32 H7 MCU, TDK ICM-45686, Bosch BMP388, dan sensor BMM50 untuk prestasi yang dipertingkatkan.
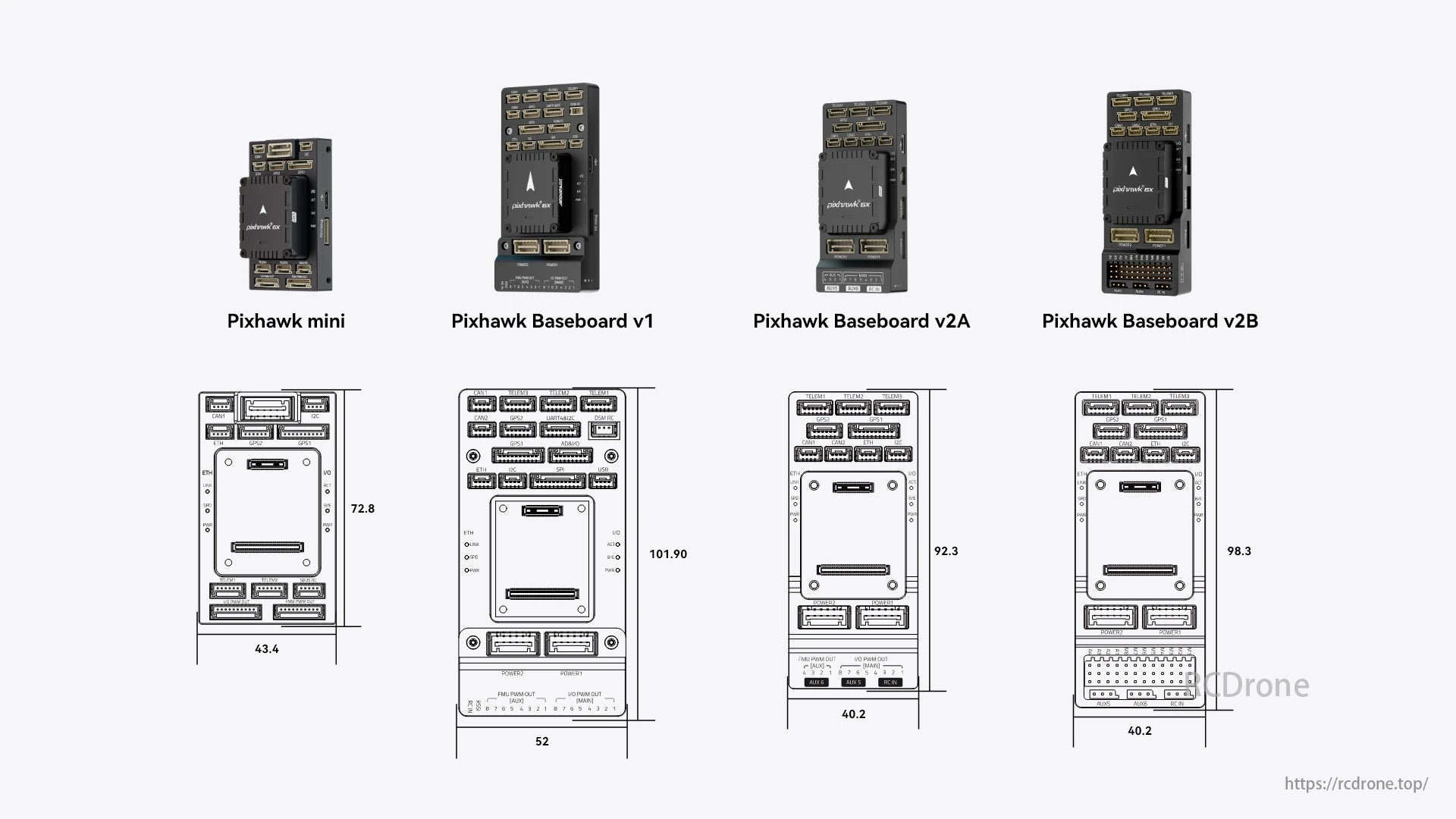
Pengawal penerbangan Pixhawk mini, Baseboard v1, v2A, dan v2B dengan dimensi: 43.4x72.8, 52x101.90, 40.2x92.3, dan 40.2x98.3 masing-masing. Pelbagai port dan penyambung boleh dilihat pada setiap model.
Related Collections