Holybro Pixhawk 6X-RT - (Edisi Pembangun) Autopilot Pengawal Penerbangan Standard/Set Mini
Holybro Pixhawk 6X-RT - (Edisi Pembangun) Autopilot Pengawal Penerbangan Standard/Set Mini
HolyBro
Tidak dapat memuatkan ketersediaan pengambilan
Ikhtisar
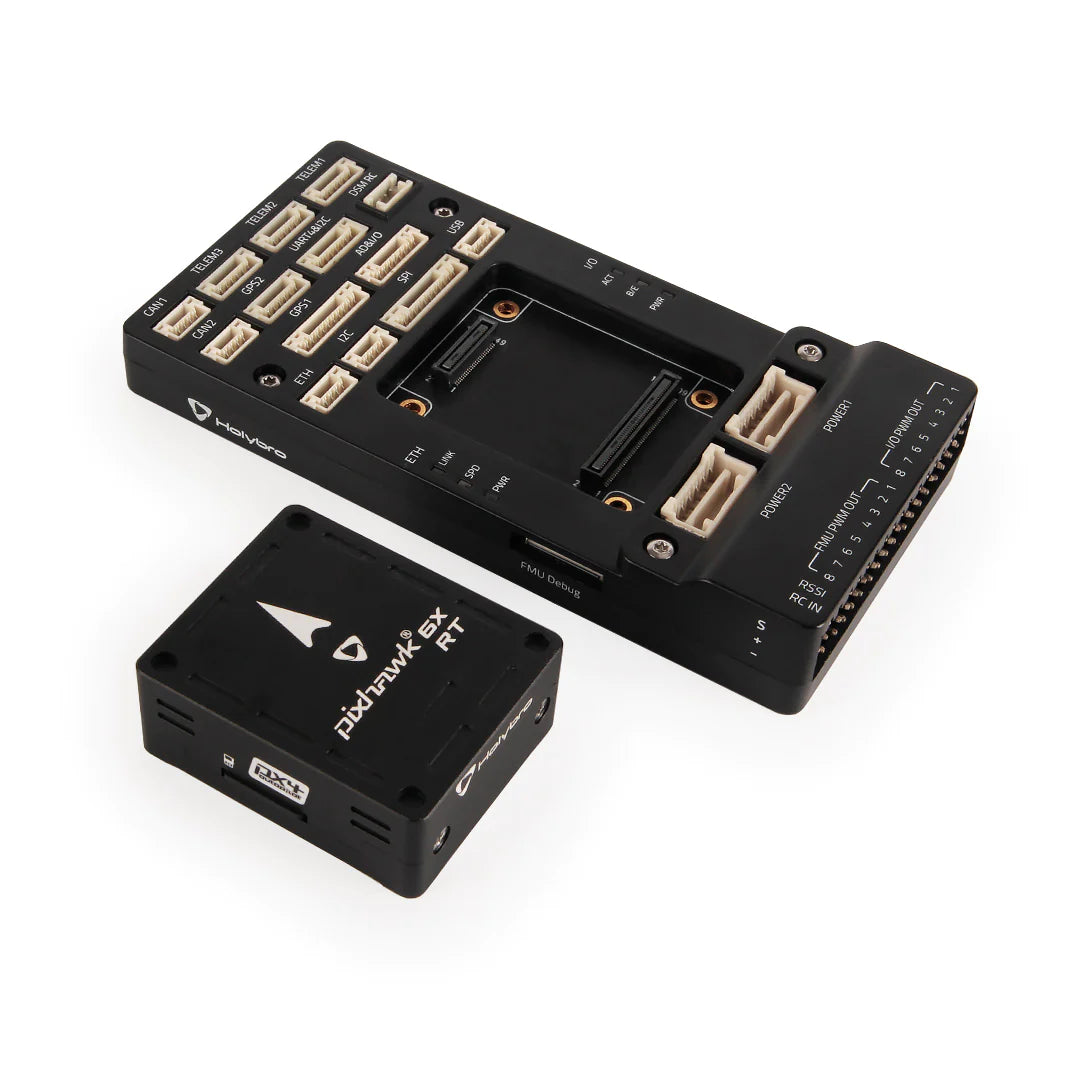
Pixhawk 6X-RT adalah berdasarkan Pixhawk® FMUv6X-RT Open Standard dan Pixhawk® Autopilot Bus Standard. Ia didatangkan dengan PX4 Autopilot® prapasang. Di dalam pengawal penerbangan Pixhawk 6X-RT, anda boleh menemui i.MXRT1176 MCU, dipasangkan dengan teknologi penderia daripada Bosch® dan InvenSense®, memberikan anda fleksibiliti dan kebolehpercayaan untuk mengawal mana-mana kenderaan autonomi.
I.Pengawal mikro MXRT1176 mengandungi Arm® Cortex-M7 pada 1 GHz dan Cortex-M4 pada 400 MHz. Ia mempunyai 2MB SRAM dan 64MB Octal SPI Flash. Terima kasih kepada kuasa pemprosesan yang dikemas kini, pembangun boleh menjadi lebih produktif dan cekap dengan kerja pembangunan mereka, membolehkan algoritma dan model yang kompleks.
Ia termasuk IMU berprestasi tinggi, bunyi rendah yang direka untuk penstabilan yang lebih baik, dan mempunyai IMU lewah tiga kali ganda & barometer lewah berganda pada bas berasingan. Apabila Autopilot mengesan kegagalan sensor, sistem bertukar dengan lancar kepada yang lain untuk mengekalkan kebolehpercayaan kawalan penerbangan. LDO bebas kuasa setiap set sensor dengan kawalan kuasa bebas. Sistem pengasingan getaran untuk menapis getaran frekuensi tinggi dan mengurangkan hingar untuk memastikan bacaan yang tepat, membolehkan kenderaan mencapai prestasi penerbangan keseluruhan yang lebih baik. Microchip Ethernet PHY bersepadu, komunikasi berkelajuan tinggi dengan komputer misi melalui Ethernet kini boleh dilakukan.
Pixhawk 6X-RT sesuai untuk pembangun di makmal penyelidikan korporat, syarikat pemula, ahli akademik (penyelidikan, profesor, pelajar) dan aplikasi komersial. Pengawal Penerbangan ini serasi dengan mana-mana papan asas yang menggunakan bas Pixhawk Autopilot, seperti Papan Bes Pixhawk, Papan Bes Mini Pixhawk dan Papan Beskap Pixhawk RPi CM4.
Titik Reka Bentuk Utama
- Dwi teras berprestasi tinggi i.Pemproses MXRT1176 dengan Cortex-M7 @ 1GHz – Cortex-M4 @ 400MHz
- Pengawal penerbangan modular: sistem IMU, FMU dan Pangkalan yang dipisahkan disambungkan dengan penyambung Bas Autopilot Pixhawk® 100-pin & 50-pin.
- Lewahan: 3x penderia IMU & 2x penderia Barometer pada bas berasingan
- Domain lewah tiga kali ganda: Domain penderia yang diasingkan sepenuhnya dengan bas yang berasingan dan kawalan kuasa yang berasingan
- Sistem pengasingan getaran untuk menapis getaran frekuensi tinggi dan mengurangkan hingar untuk memastikan bacaan yang tepat
- Antara muka Ethernet untuk penyepaduan komputer misi berkelajuan tinggi
- IMU dikawal suhu oleh perintang pemanasan atas kapal, membenarkan suhu kerja optimum IMU
- Elemen selamat perkakasan NXP EdgeLock SE051 sambungan kepada EdgeLock SE050 Plug & Trust yang dipercayai secara meluas, menyokong kemas kini applet dalam medan dan menghantar keselamatan terbukti diperakui kepada CC EAL 6+, dengan AVA_VAN.5 sehingga tahap OS, untuk perlindungan kuat terhadap senario serangan terkini. Eg untuk menyimpan ID operator dengan selamat
Nota:
- Edisi pembangun ini untuk pengguna awal sementara kami terus mengumpul waktu ujian penerbangan
- Pengawal Penerbangan ini pada masa ini menyokong dalam Tindanan Penerbangan PX4 sahaja. (Sasaran Perisian Tegar: FMUv6xrt). Ia tidak disokong dalam Ardupilot.
- Pengawal Penerbangan ini menggunakan modul kuasa digital (sama seperti Pixhawk 6X, senarai penuh boleh didapati di sini) Carta perbandingan modul kuasa
Spesifikasi
-
MCU: i.MXRT1176
-
Cortex-M7 @ 1GHz
-
Cortex-M4 @ 400MHz
-
2MB SRAM
-
Denyar SPI Oktal 64MB
-
Pemproses IO: STM32F103
-
32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM
-
Penderia on-board
-
Accel/Gyro: BMI088
-
Accel/Gyro: ICM-42670-P
-
Accel/Gyro: ICM-42686-P
-
Mag: BMM150
-
Barometer: 2x BMP388
- Elemen selamat perkakasan
- NXP EdgeLock SE051C2
- Antara muka SDHC
- PWM 12 Saluran
- 8x UART
- 4x I2C
- 6x SPI
- 3x CAN-FD
- RMII 100M Ethernet
- USB
- Pengdayaan Perisian Sumber Terbuka
- Autopilot PX4
- NuttX RTOS
- Zephyr RTOS
Set Standard SKU20257/ Set Mini SKU258 Termasuk:
-
Modul Pengawal Penerbangan Pixhawk 6X-RT
-
Pangkalan Standard Pixhawk/Pangkalan Mini Pixhawk
- Modul Kuasa HV PM02D
-
Set Kabel
Pautan rujukan:
- Arahan Berkelip Perisian Tegar (Github)
- PX4 pada NXP IMXRT1176 1 GHz MCU - Slaid pembentangan oleh NXP
- i.MX RT1176 – halaman produk 1 GHz Crossover MCU dengan Teras Arm® Cortex®
- EdgeLock® SE051: Penyelesaian Keselamatan IoT Terbukti dan Mudah Digunakan dengan Sokongan untuk Kebolehkemaskinian dan Applet Tersuai
Related Collections