Himpunan Holybro Pixhawk Jetson Baseboard Dengan 6X / 6X Pro dan NVIDIA Jetson
Himpunan Holybro Pixhawk Jetson Baseboard Dengan 6X / 6X Pro dan NVIDIA Jetson
HolyBro
Tidak dapat memuatkan ketersediaan pengambilan
Gambaran keseluruhan
The Papan Tiang Holybro Pixhawk Jetson direka bentuk berdasarkan Spesifikasi sumber terbuka Pixhawk Autopilot Bus (PAB). dan disepadukan dengan lancar dengan Papan Pembawa NVIDIA Jetson Orin NX/Nano. The Faktor Borang PAB membenarkan keserasian dengan mana-mana pengawal penerbangan PAB, termasuk Pixhawk 6X. Papan ini menggabungkan kuasa pengiraan bagi NVIDIA Jetson dengan keupayaan kawalan penerbangan Pixhawk, menjadikannya sesuai untuk aplikasi autonomi lanjutan.
Ciri-ciri Utama
-
Sistem Bersatu: Menggabungkan Pixhawk dan NVIDIA Jetson dalam satu papan.
-
Ketersambungan yang lancar: Jetson dan Pixhawk berkomunikasi melalui Suis UART, CAN dan Ethernet.
-
Keserasian Luas: Menyokong Jetson Orin NX & Orin Nano.
-
Pengembangan Kelajuan Tinggi: Ciri-ciri 2x slot kunci M.2 untuk WiFi/Bluetooth dan NVMe SSD.
-
Integrasi Pixhawk 6X: Dilengkapi dengan Penderia ICM-45686 untuk kawalan penerbangan yang dipertingkatkan.
Pemproses & Penderia
Pemproses FMU:
-
STM32H753
-
ARM Cortex-M7 32-bit, 480MHz
-
Memori Denyar 2MB, RAM 1MB
Pemproses IO:
-
STM32F103
-
ARM Cortex-M3 32-bit, 72MHz
-
64KB SRAM
Penderia Onboard (Rev8)
-
Accelerometer/Gyro: 3x ICM-45686 (dengan Teknologi BalancedGyro™)
-
Barometer: ICP20100 & BMP388
-
Magnetometer: BMM150
Pelabuhan Baseboard & Ketersambungan
Penyambung Jetson
-
2x Port Ethernet Gigabit (Disambungkan ke Jetson & Autopilot melalui Suis Ethernet RTL8367S)
-
2x Input Kamera MIPI CSI (4 lorong setiap satu, 22-Pin Raspberry Pi Cam FFC)
-
2x Port Hos USB 3.0 (USB-A, had semasa 5A)
-
2x USB 2.0 Pelabuhan Hos (5-Pin JST-GH)
-
USB 2.0 untuk Penyahpepijatan (USB-C)
-
Output Mini HDMI
-
2x M.2 Slot:
-
Kunci M (2242) untuk NVMe SSD (PCIEx4)
-
Kunci E (2230) untuk WiFi/BT (PCIEx2, UART, USB, I2S)
-
-
Pelabuhan BOLEH (Disambungkan ke Autopilot BOLEH2, 4-Pin JST-GH)
-
Pelabuhan SPI, I2C, I2S, UART (Pelbagai penyambung JST-GH)
-
Port Kuasa Kipas
-
Input Kuasa: Penyambung XT30, 7-21V (3S-4S)
-
UBEC 12A (3-14S) Disyorkan untuk aplikasi >4S
Penyambung Autopilot
-
Antara Muka Bas Autopilot Pixhawk: 100-Pin & 50-Pin Hirose DF40
-
Input Modul Kuasa Digital Berlebihan
-
Sokongan Monitor Kuasa I2C
-
Port Suis GPS & Keselamatan: 10-Pin & 6-Pin JST-GH
-
2x Port CAN (4-Pin JST-GH)
-
3x Telemetri Port (JST-GH, satu disambungkan ke UART1 Jetson)
-
16 PWM Output (2x 10-Pin JST-GH)
-
USB 2.0 (USB-C & 4-Pin JST-GH)
-
Input DSM (3-Pin JST-ZH, Pitch 1.5mm)
-
Input RC (PPM/SBUS, 5-Pin JST-GH)
-
Port SPI untuk Bas Sensor Luaran (SPI5, 11-Pin JST-GH)
-
2x Port Nyahpepijat (FMU & IO, 10-Pin JST-SH)
Keperluan Kuasa
-
Voltan Masukan: 7-21V (3S-4S) melalui Penyambung XT30
-
Keperluan Kuasa Minimum: 8V/3A (berbeza-beza berdasarkan peranti)
-
Menyokong UBEC 12A Luaran (3-14S) untuk aplikasi redundansi & voltan lebih tinggi
-
Perlindungan Voltan Lebih Terbina dalam
Dimensi & Berat
-
Saiz Papan: 126 x 80 x 38mm (tanpa Jetson & Pengawal Penerbangan)
-
Berat: 203.2g (Termasuk Jetson, Heatsink, Pengawal Penerbangan, SSD, Modul Wi-Fi)
Spesifikasi UBEC-12A
-
Voltan Masukan: 3~14S (XT30)
-
Voltan Keluaran: 6.0V/7.2V/8.0V/9.2V (7.2V disyorkan untuk Jetson)
-
Arus Keluaran Berterusan: 12A
-
Arus Keluaran Letusan: 24A
-
Saiz: 48 x 33.6 x 16.3mm
-
Berat: 47.8g
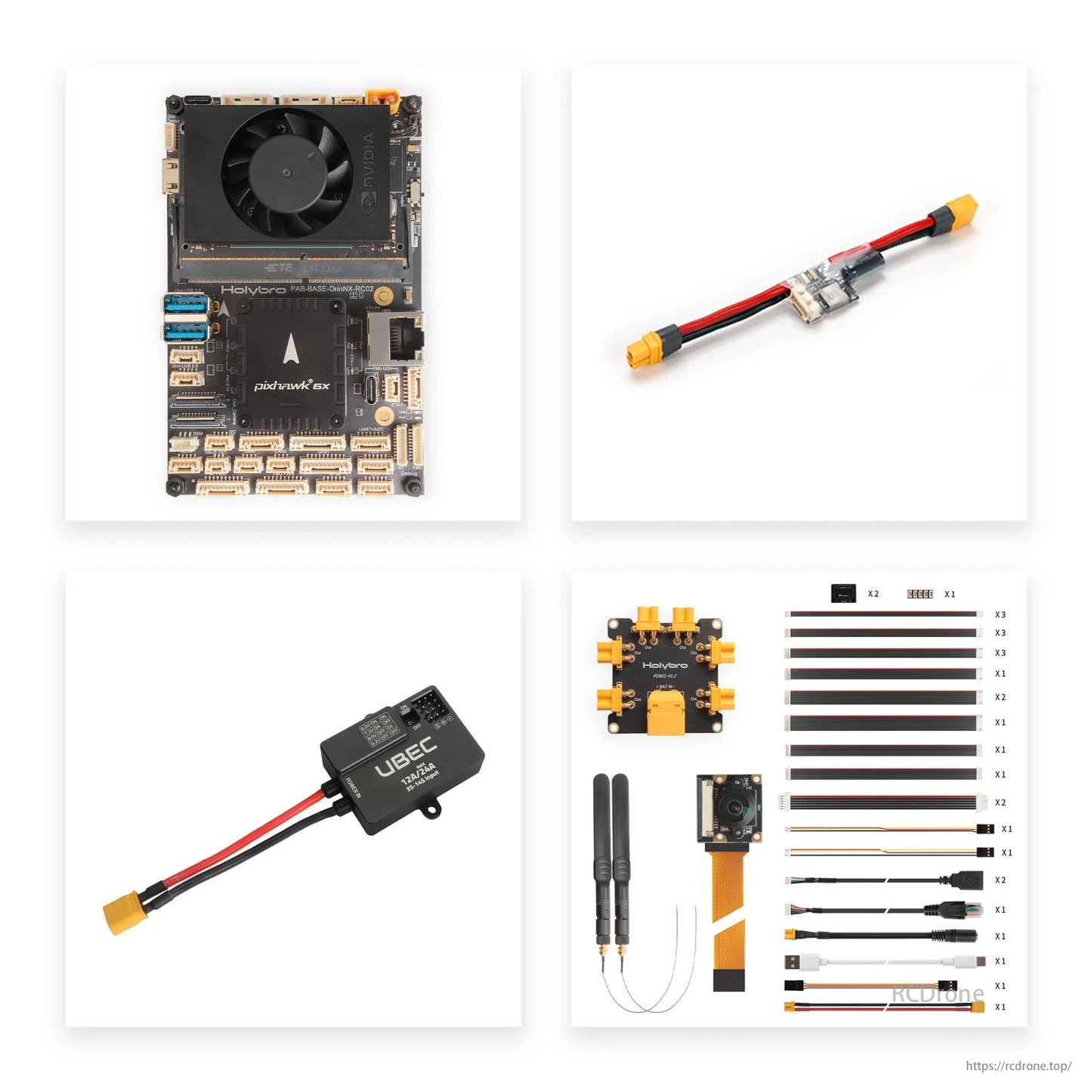
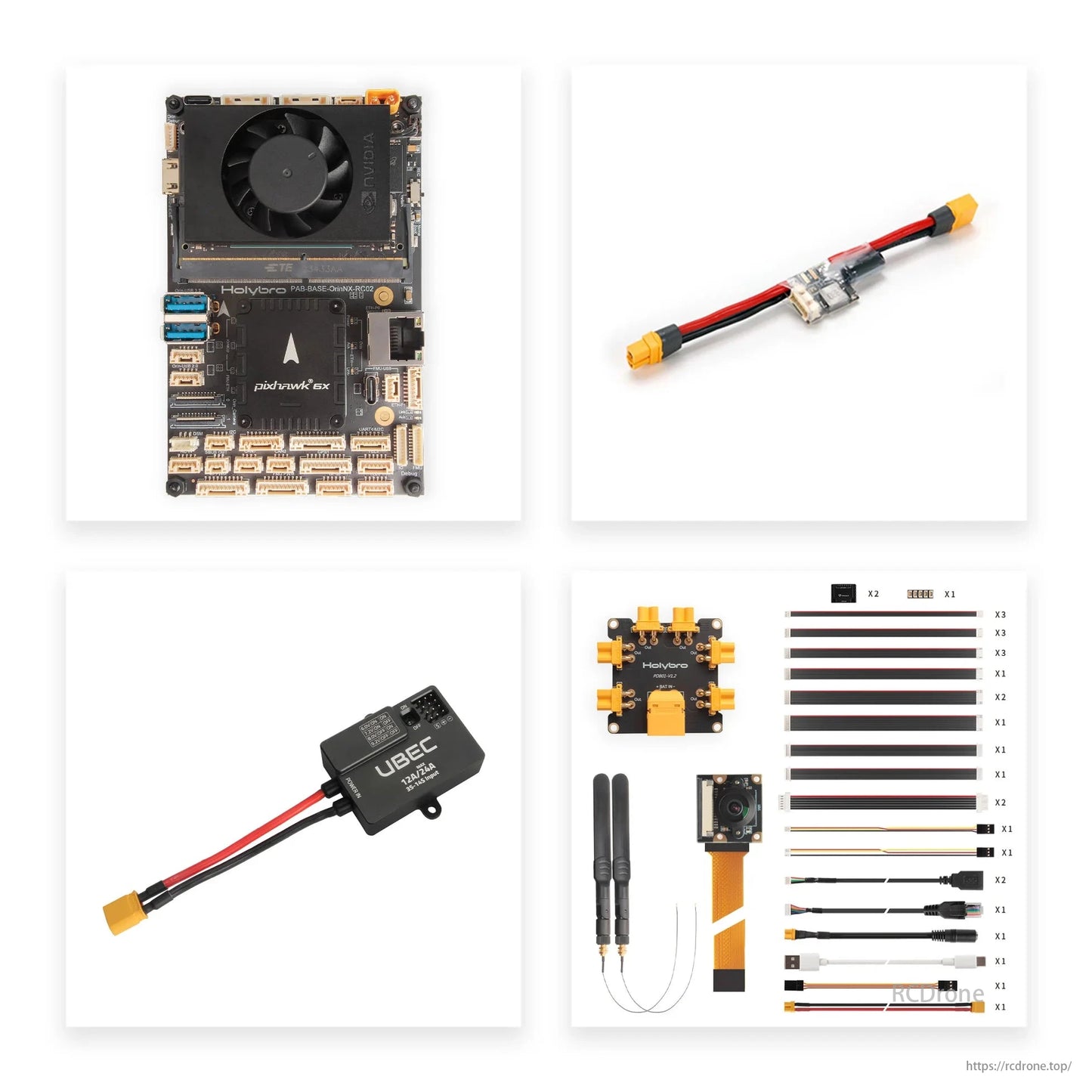
Kandungan Pakej
Himpunan Pixhawk 6X
-
Modul Pengawal Penerbangan Pixhawk 6X (ICM-45686).
-
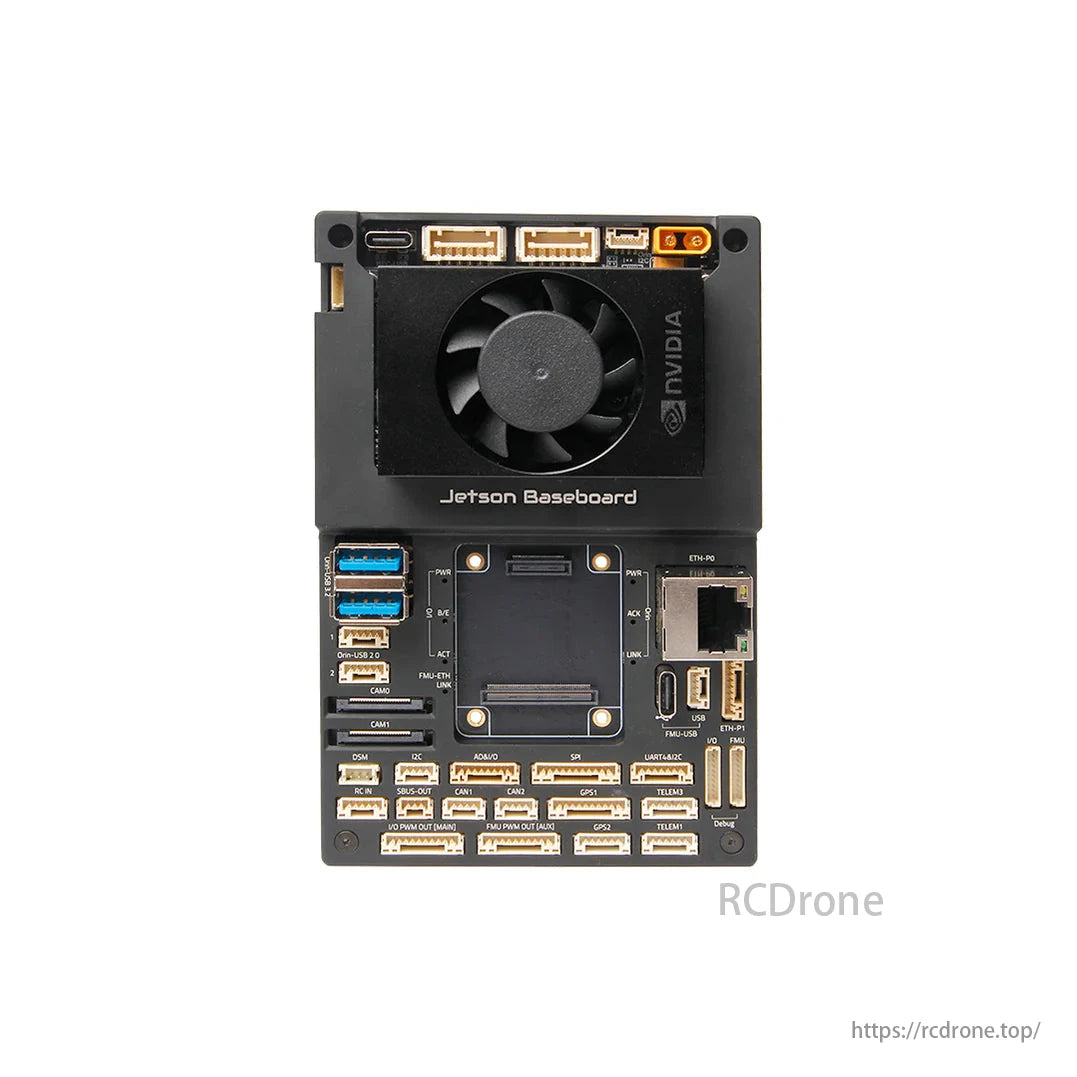
Pixhawk Jetson Orin Baseboard
-
Nvidia Orin NX (16GB RAM) / Orin Nano (4GB RAM) dengan Heatsink & Kipas
-
SSD: Samsung PM9B1 PCIe 4.0 NVMe 512GB
-
Modul Wi-Fi & Bluetooth: Intel 8265NGW AC Dual Band / Realtek RTL8B22CE
-
kamera: IMX219-200
-
Modul Kuasa PM02D
-
UBEC 12A (3-14S)
-
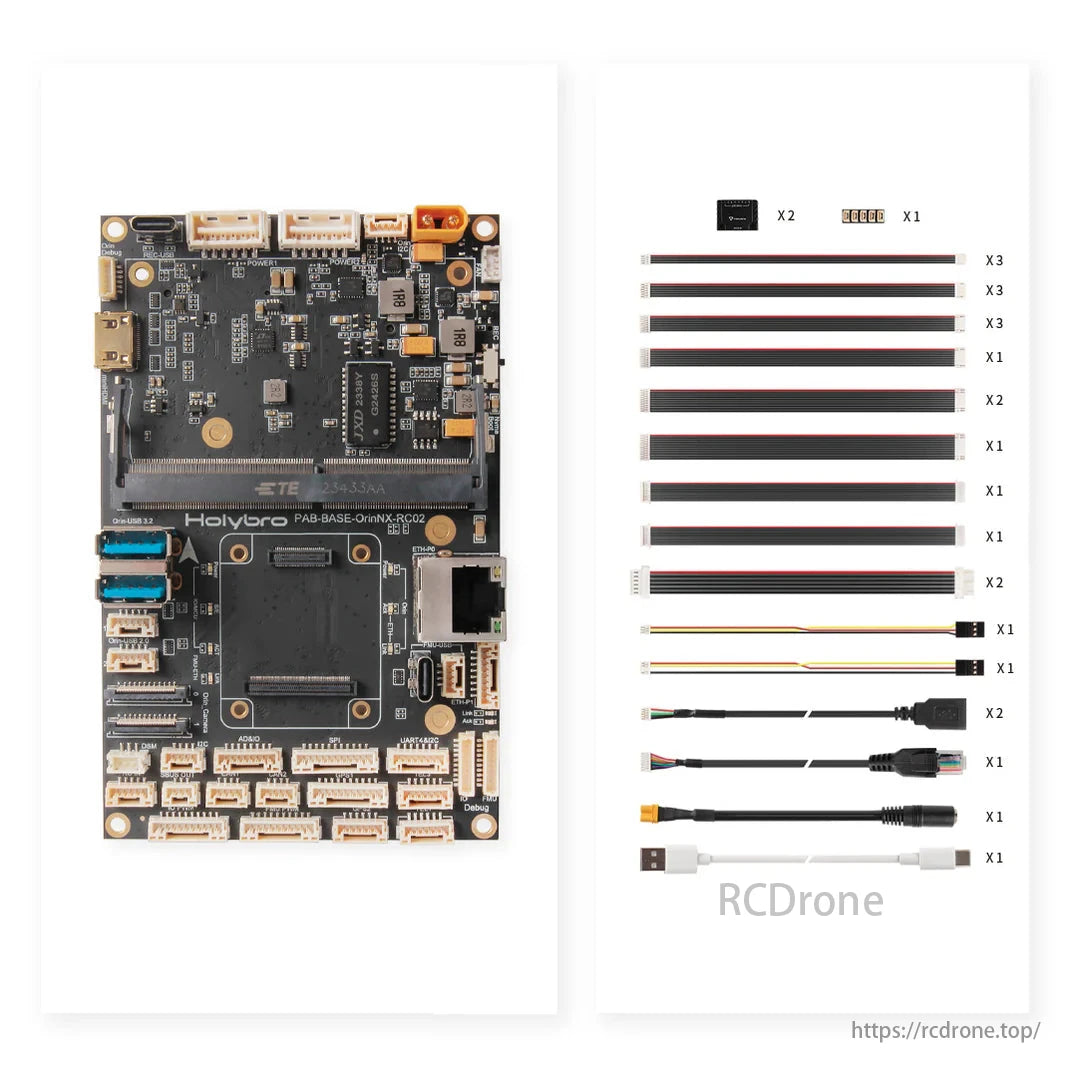
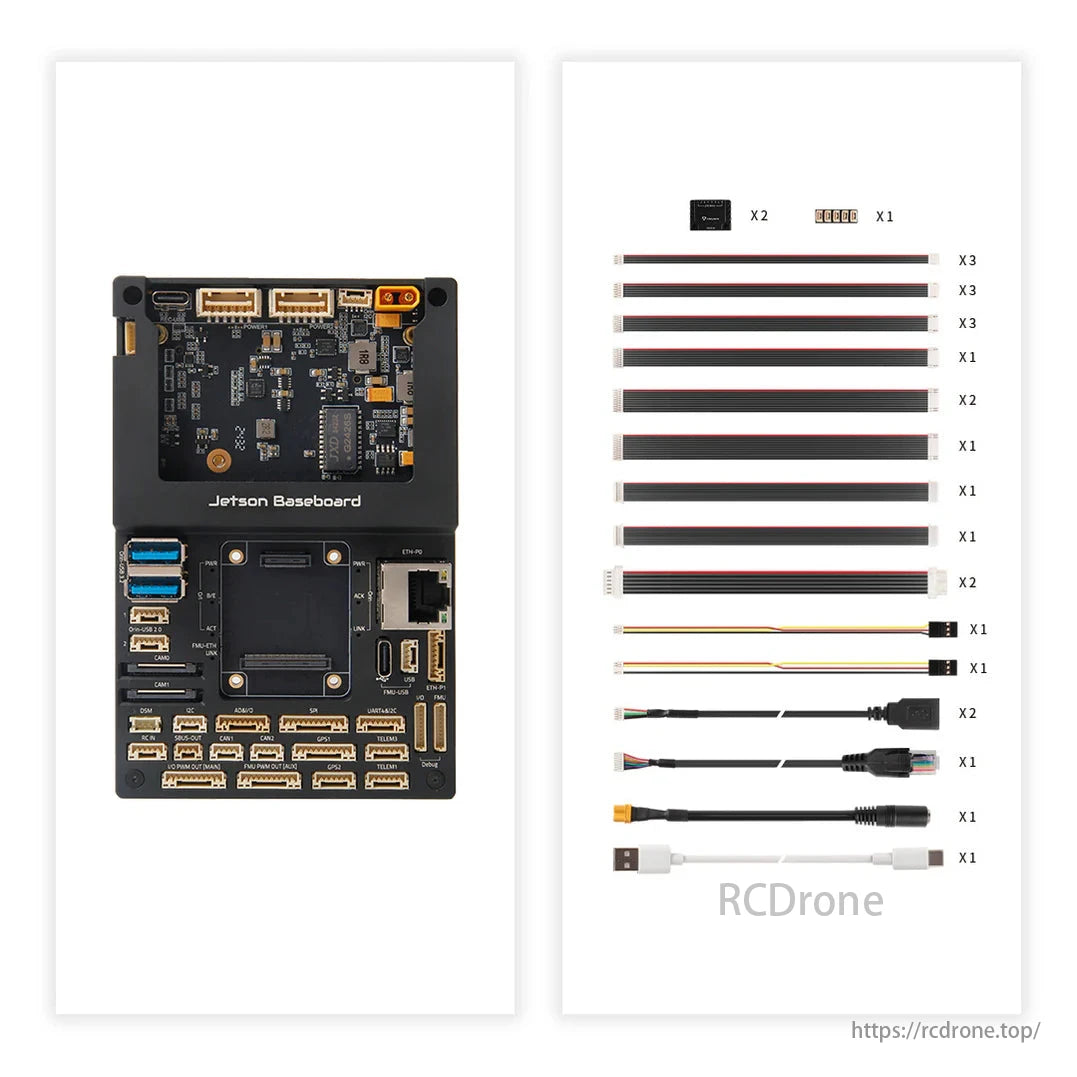
Papan PDB & Set Kabel
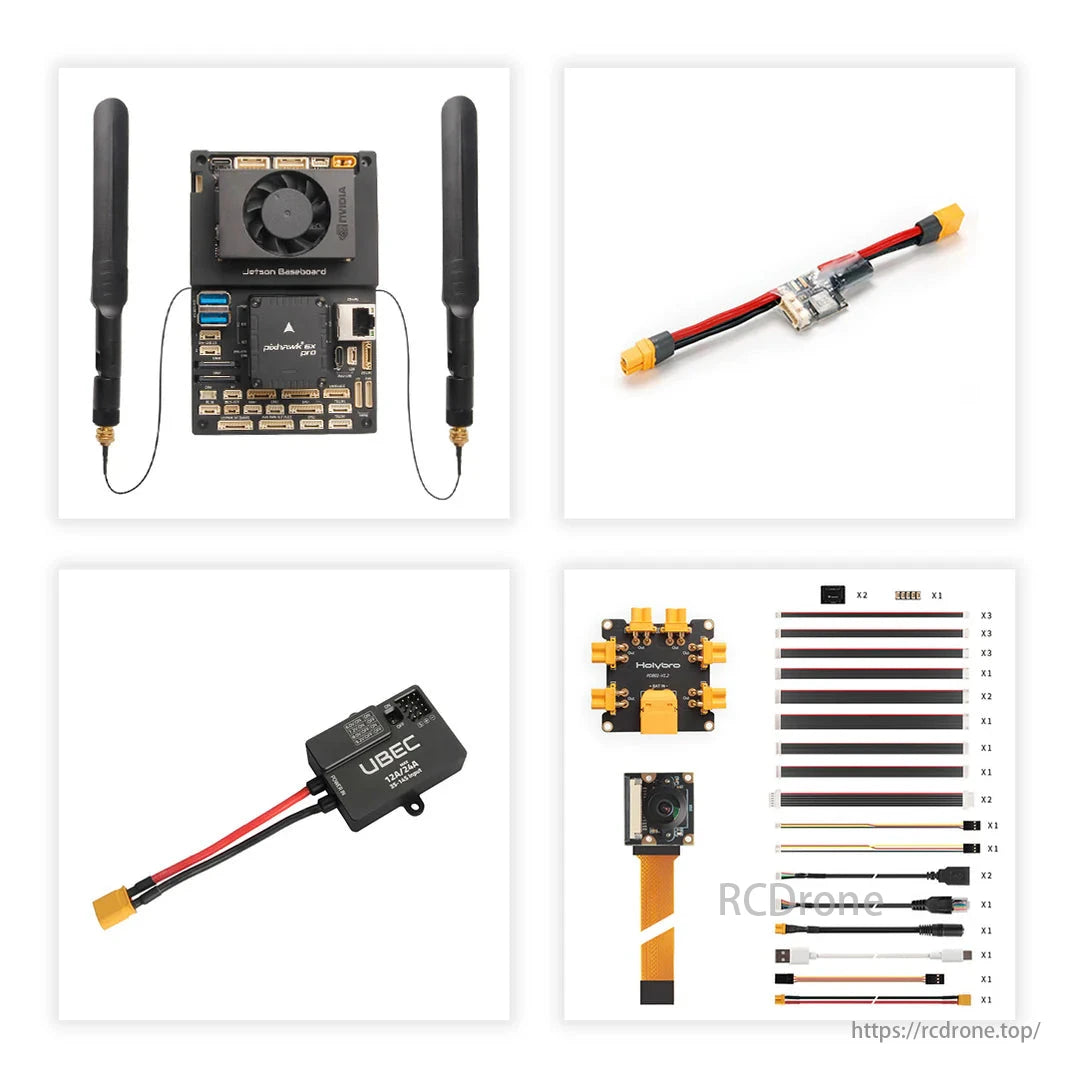
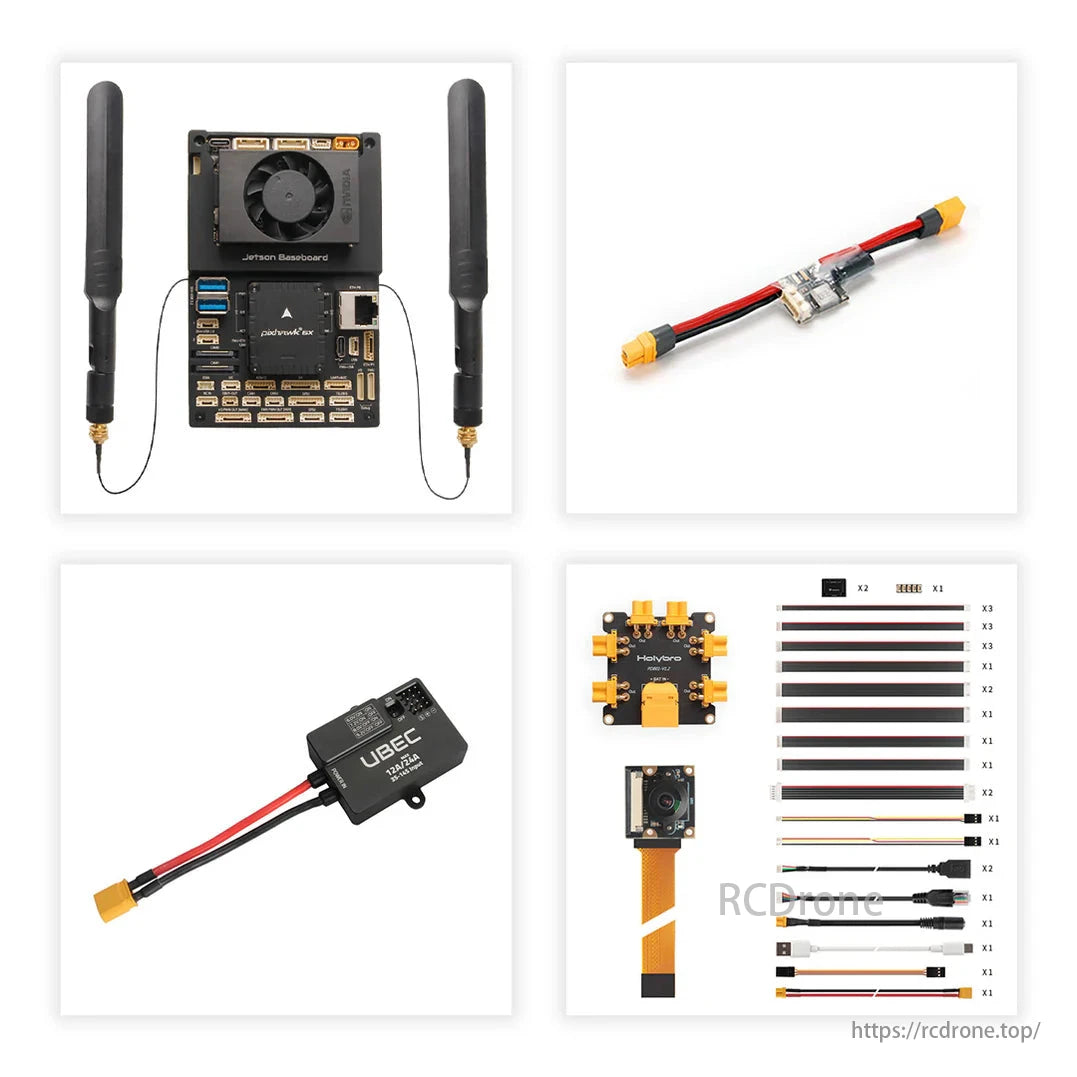
Himpunan Pixhawk 6X Pro
-
Modul Pengawal Penerbangan Pixhawk 6X Pro
-
Pixhawk Jetson Orin Baseboard (w/ or w/o Case)
-
Nvidia Orin NX (16GB RAM) / Orin Nano (4GB RAM) dengan Heatsink & Kipas
-
SSD, Modul Wi-Fi/Bluetooth, Kamera, Modul Kuasa PM02D, UBEC 12A, Papan PDB, Set Kabel
Jetson Baseboard Sahaja
-
Pixhawk Jetson Orin Baseboard (w/ or w/o Case)
-
Set Kabel
Pautan Rujukan
Kelayakan Log Masuk Lalai untuk Jetson Orin:
-
ID:
holybro -
kata laluan:
123
Butiran




Pixhawk dan Nvidia Jetson digabungkan dalam satu papan.

Nvidia jetson disambungkan melalui uart can dan suis ethernet menggunakan penyambung rj45 untuk sistem autopilot
Spesifikasi Sumber Terbuka Bas Autopilot Pixhawk (PAB).

Sistem Penyambung Jetson SoDIMM Serasi Sepenuhnya: Jetson Orin NX/Nano

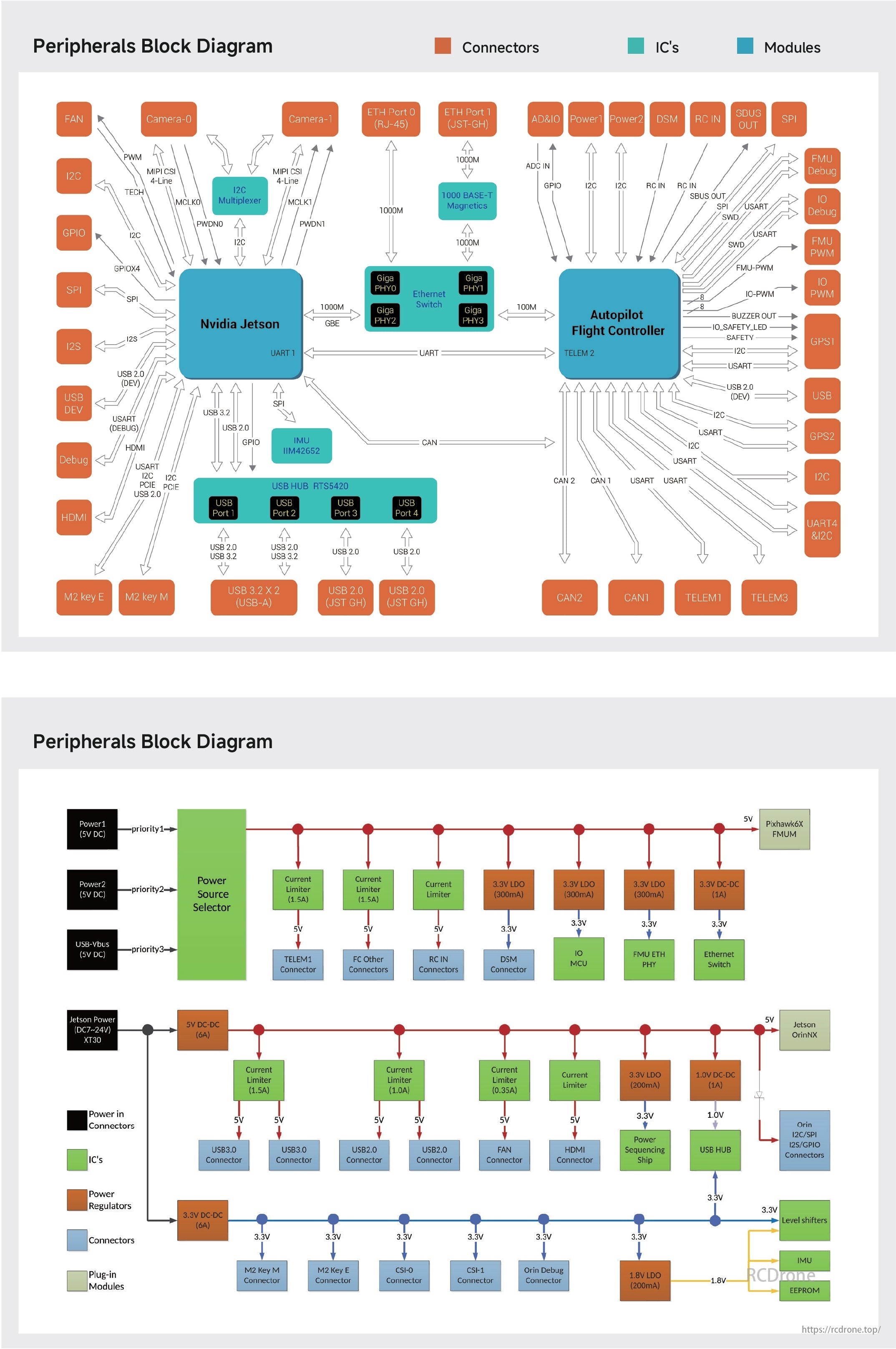
Imej itu menggambarkan gambarajah blok persisian untuk sistem terbenam, yang menampilkan komponen seperti Nvidia Jetson dan Pengawal Penerbangan Autopilot. Ia termasuk pelbagai penyambung, IC dan modul seperti port USB, suis Ethernet dan pengawal selia kuasa, yang menggambarkan interkoneksi dan aliran data mereka.
Rujukan Gambarajah Pendawaian

Dua rajah menggambarkan sistem pengagihan kuasa untuk modul Jetson menggunakan satu bateri. Gambar rajah kiri menggunakan Modul Kuasa PM02D dan Papan Agihan Kuasa, manakala rajah kanan termasuk UBEC Luaran untuk bateri yang lebih besar daripada 4S.Kedua-dua tetapan memastikan peraturan voltan yang betul untuk Jetson dan Pixhawk Power.
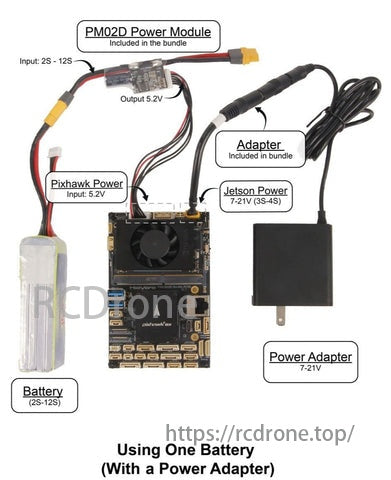
Modul Kuasa PM02D menyambungkan bateri ke Pixhawk dan Jetson, menggunakan satu bateri dengan penyesuai kuasa untuk input 7-21V.
Related Collections