





Kombo Pengawal Penerbangan JIYI K++ V2 - Pengawal Penerbangan Generasi Baharu Kombo LED GPS PMU untuk Dron Pertanian
Kombo Pengawal Penerbangan JIYI K++ V2 - Pengawal Penerbangan Generasi Baharu Kombo LED GPS PMU untuk Dron Pertanian
JIYI
Tidak dapat memuatkan ketersediaan pengambilan
Sebagai generasi baharu sistem kawalan penerbangan perdana, Jiyi k++ menggabungkan kelebihan kawalan penerbangan klasik K3A dan mengukuhkan keserasian dan skim berbilang redundansi untuk membentuk sistem kawalan redundan berlebihan dengan prestasi unggul dan kebolehpercayaan yang kukuh.

Ciri Utama:
Kawalan Tepat
Ketepatan penerbangan meningkat sebanyak 25%, ketepatan kawalan menegak meningkat sebanyak 20%, trajektori lebih tepat dan penerbangan adalah lebih lancar.
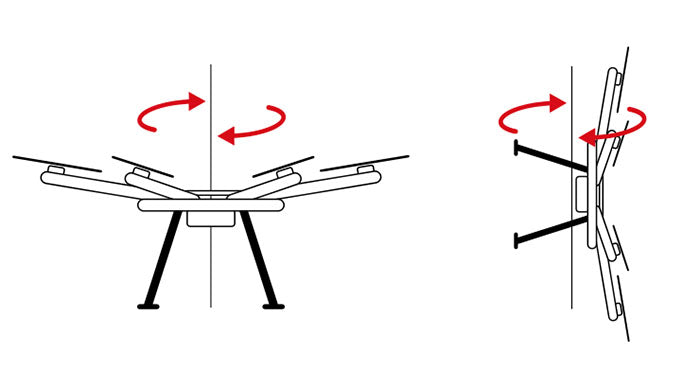
Ketahanan Hentakan Hebat
Reka bentuk struktur penyerapan hentakan berganda untuk bertindak balas terhadap pelbagai kesan getaran yang kompleks.
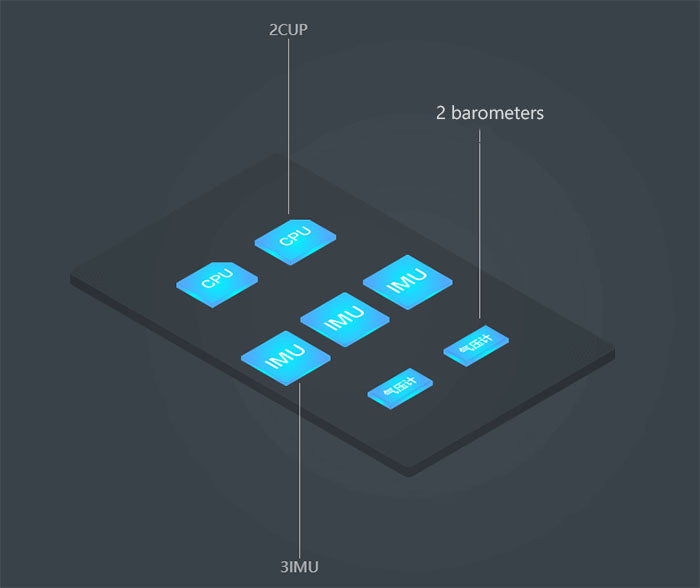
Sandaran Berbilang Lebihan
Tiga imu berlebihan, barometer berlebihan berganda, menjadikan penerbangan lebih selamat.
Pengurangan Bunyi dan Penjimatan Kuasa
Bunyi motor tiga kali lebih kecil, ia boleh menjimatkan 5~15% elektrik.
Bebas Penentukuran
Konfigurasi penderia gred industri,satu penentukuran,Penentukuran imu percuma seumur hidup.
Kawalan SikapBetter2043 rintangan angin, dan kawalan sikap lebih stabil,
Konfigurasi CPU Dwi
Konfigurasi CPU dwi, pemprosesan yang lebih berkuasa, ia menyokong kawalan ESC sehingga 1000Hz.
Kuasa Sandaran
Kawalan utama menyokong antara muka kuasa sandaran. Bekalan kuasa lebih dipercayai.
Fungsi analisis getaran pintar
K++ disertakan dengan fungsi analisis getaran pintar, yang boleh menentukan getaran pesawat dalam masa nyata semasa penerbangan, dan memaparkan amaran keselamatan dalam APP untuk membantu melaraskan kebolehsuaian semua aspek peranti fiuslaj, menjadikan operasi penerbangan lebih cekap tenaga, lebih selamat dan lebih selamat.

Berbilang Sandaran
K++ dilengkapi dengan tiga penderia IMU berlebihan dan dwi penderia barometer berlebihan. Semasa penerbangan, data penderia IMU dipantau dalam masa nyata melalui algoritma diagnostik lanjutan. Apabila penderia dalam sistem navigasi tidak normal, sistem segera beralih kepada penderia lain. Untuk memastikan penerbangan selamat pesawat.
Satu penentukuran, tidak takut gangguan alam sekitar
K++ dipertingkatkan daripada konfigurasi penderia gred industri yang berkuasa dan pengoptimuman algoritma. Selepas sistem kawalan penerbangan pesawat yang sama dipasang, ia hanya perlu ditentukur sekali sahaja. Walaupun persekitaran pengendalian diganti, ia tidak perlu ditentukur semula dan mudah digunakan.
Parameter produk
Jenis multi-rotor yang disokong:
Quadcopter (+, X)
Hexacopter (+, X, IY dan YI kembar sepaksi)
(+Octocopter jenis, jenis X, jenis V)
Jenis ESC yang disokong: 490HZ atau kurang PWM ESC
Saluran keluaran maksimum: 8 saluran
Jenis kawalan jauh yang disyorkan
Jenis penerima yang disokong: PPM, S- Penerima BUS
Peralatan pengembangan sokongan: K-BOX, IOT, RTK, radar pengelakan halangan, radar rupa bumi, kawalan jauh bersepadu, kamera FPV, meter aliran, tolok aras
Voltan kerja: 2-12S
Penggunaan kuasa : kurang daripada 5W
Suhu persekitaran kerja: -10~60°C
Suhu persekitaran storan: -25~60°C
Penilaian rintangan gempa bumi: <1G
Ciri-ciri penerbangan
Ketepatan melayang: arah mendatar ±1.5 m; arah menegak ±0.5 m
Sudut kecondongan maksimum: 30°
Kelajuan yaw maksimum: 150°/ saat
Penerima SBUS Kelajuan menegak maksimum: 6 m / s
Rintangan angin: angin berterusan: 4
Tiupan: Tahap 5
Mod dan fungsi penerbangan:
Mod sikap, mod GPS, operasi AB, operasi laluan, kawalan kehilangan pemulangan satu butang, di luar kawalan teruskan operasi, perlindungan voltan rendah, fungsi pagar, fungsi penyimpanan log, pendaratan fungsi kunci, fungsi zon larangan terbang, fungsi perlindungan getaran, fungsi perlindungan bintang, fungsi pengurangan hingar aktif, fungsi pengesanan jujukan motor, fungsi pengesanan arah, mod pam dwi, fungsi perlindungan pemecahan dadah, semburan ketepatan, kawalan suis pam air, pam air kawalan pautan
Spesifikasi perkakasan
Berat:
Jumlah berat bersih: 321g
FC: 87g
PMU: 41g
PMU2 (UPS): 44
Saiz
FC: 72.6mm × 48.0mm × 22.8mm
PMU: 53.4mm × 34.4mmx14.5mm
×PMU2 (U4.PS): × 3.4mm mmx14.5mm
GPS: 62*14.3mm
LED: 24*24*8mm
Related Collections





