













LINKERBOT Tangan Robot Linker Hand L10, 10 DoF, Kawalan CAN/RS485, Pemacu Gear Cacing, Cengkaman 80N, DC24V+/-10%
LINKERBOT Tangan Robot Linker Hand L10, 10 DoF, Kawalan CAN/RS485, Pemacu Gear Cacing, Cengkaman 80N, DC24V+/-10%
LINKERBOT
Tidak dapat memuatkan ketersediaan pengambilan
Overview
LINKERBOT Linker Hand L10 adalah Tangan Robot yang direka untuk manipulasi yang cekap dan kawalan yang tepat. Ia mempunyai 10 darjah kebebasan dengan penghantaran gear cacing dan berkomunikasi melalui CAN/RS485 untuk integrasi yang boleh dipercayai ke dalam sistem penyelidikan dan industri.
Ciri Utama
- Tangan cekap 10 DoF dengan penghantaran gear cacing untuk pengaktifan yang stabil.
- Antara muka kawalan: CAN dan RS485.
- Ketepatan penentuan semula < +/-0.2mm; masa buka/tutup biasa 1.2s.
- Kemampuan daya: 15N maksimum daya hujung jari ibu jari, 15N maksimum daya hujung jari empat jari, 80N maksimum daya genggaman lima jari.
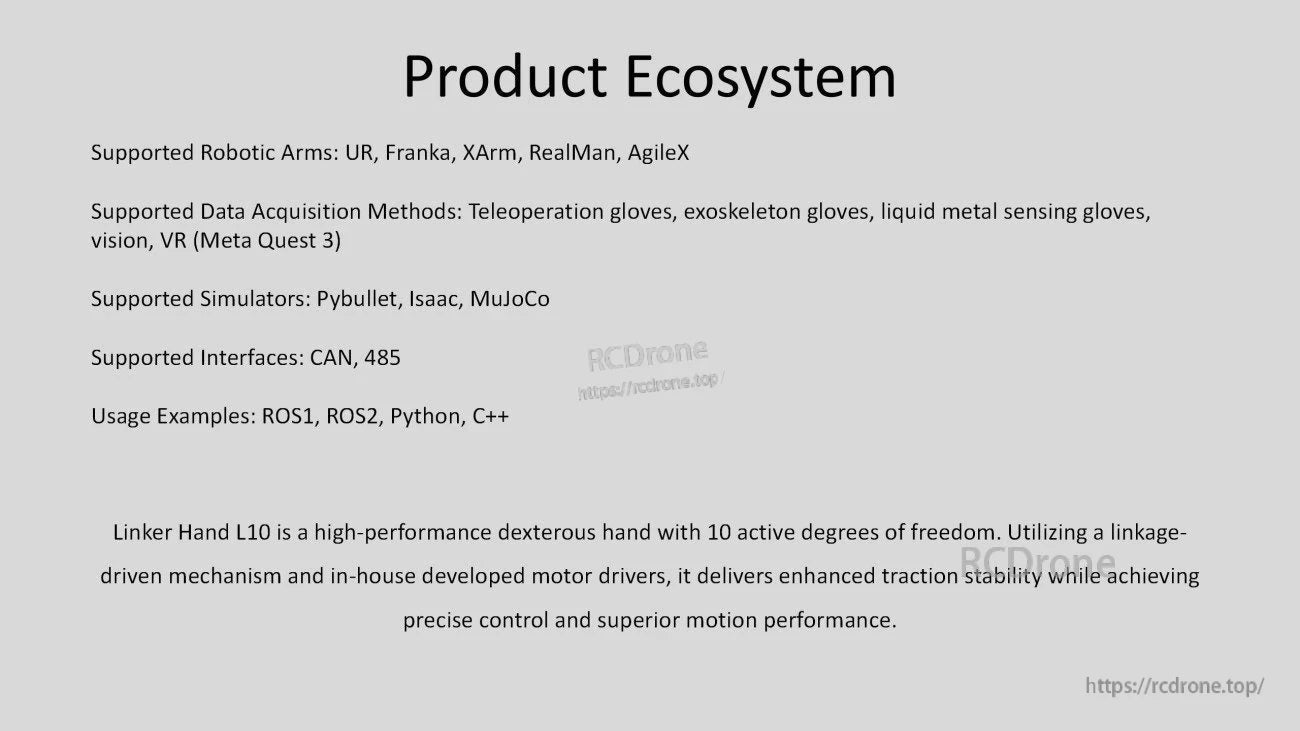
- Mod kawalan dan utiliti dari manual produk: kawalan kedudukan, kawalan kelajuan, maklum balas haptik (kawalan daya) melalui sensor hujung jari, dan peningkatan firmware dalam talian.
- Ekosistem (bahan produk per): lengan robot yang disokong UR, Franka, XArm, RealMan, AgileX; simulator yang disokong Pybullet, Isaac, MuJoCo; contoh penggunaan termasuk ROS1, ROS2, Python, C++; kaedah pengambilan data termasuk sarung tangan teleoperasi, sarung tangan eksoskeleton, sarung tangan pengesanan logam cecair, penglihatan, dan VR (Meta Quest 3).
Untuk sokongan pra-jualan atau integrasi, hubungi [email protected] or lawati https://rcdrone.top/.
Spesifikasi
| Darjah Kebebasan (DoF) | 10 |
| Bilangan Sendi | 20 (10 Aktif + 10 Pasif) |
| Mod Transmisi | Transmisi Gear Cacing |
| Antara Muka Kawalan | CAN/RS485 |
| Berat | 800g |
| Muatan Maksimum | 25kg |
| Voltan Operasi | DC24V+/-10% |
| Arus Statik | 0.2A |
| Arus Purata (Gerakan Tanpa Beban) | 0.5A |
| Arus Maksimum | 3A |
| Ketepatan Penentuan Ulang Posisi | < +/-0.2mm |
| Masa Pembukaan/Penutupan | 1.2s |
| Kuasa Jari Ibu Jari Maksimum | 15N |
| Kuasa Jari Empat Jari Maksimum | 15N |
| Kuasa Genggaman Lima Jari Maksimum | 80N |
Sensor Tekanan
| Array Piezoresistif | 6*12 |
| Kawasan Beban Kuasa Sensor | 9.6*14.4mm |
| Kuasa Pemicu | 5g |
| Julat Pengukuran | 20N |
| Hayat Perkhidmatan | 100,000 Kitaran |
| Kadar Rangka Komunikasi | 200FPS |
Sensor Kapasitif (Pilihan)
| Kekerapan Pengambilan | >=50Hz |
| Julat Pengukuran | 0-30N |
| Had Beban Lebih | 60N |
| Kepekaan Tekanan | 0.1N |
| Resolusi Pengukuran | 0.5%FS |
| Ketepatan Pengukuran | 2%FS |
| Resolusi Tekanan | 0.25N |
| Penyelesaian Arah | 45° |
| Jarak Pengesanan | 1cm (Logam, Badan Manusia) |
Apa yang Termasuk
- Kabel Pembaikan USB-to-CAN x1
- Kabel Penyambung XT30 (2+2) x1
- Penyesuai Kuasa x1
- Kabel Kuasa x1
- Linker Hand L10 x1
Aplikasi
- Penyelidikan dan pendidikan manipulasi cekap menggunakan ROS1/ROS2 dan simulator (Pybullet, Isaac, MuJoCo).
- Teleoperasi melalui sarung tangan, sarung tangan eksoskeleton, sarung tangan pengesanan logam cecair, penglihatan, dan VR (Meta Quest 3).
- Pemasangan tepat, operasi berasaskan laluan, mengetatkan skru, penggenggaman lembaran nipis, dan pengendalian objek umum.
Manual
Linker_Hand_L10_Product_Manual.pdf
Butiran

Linker Hand L10 menawarkan 10 DOF, gerakan tepat melalui mekanisme pautan dan pemacu motor khusus. Menyokong UR, Franka, ROS, Python, VR, Pybullet, CAN, dan banyak lagi untuk integrasi dan kawalan robotik yang pelbagai.
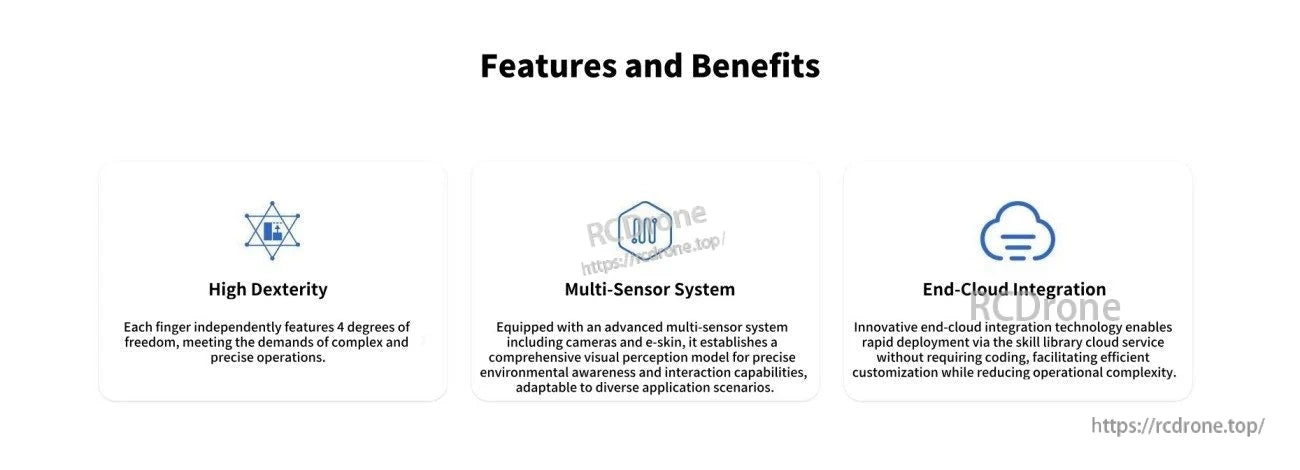
Linker Hand L10 memberikan ketangkasan yang tinggi, dengan setiap jari menawarkan 4 darjah kebebasan untuk operasi yang tepat. Sistem multi-sensornya—dilengkapi dengan kamera dan e-skin—memberikan kesedaran persekitaran yang menyeluruh dan interaksi yang adaptif. Melalui integrasi end-cloud, pengguna dapat dengan cepat menggunakan tangan tersebut melalui perkhidmatan awan perpustakaan kemahiran tanpa kod, membolehkan penyesuaian yang efisien sambil mengurangkan kerumitan operasi. Bersama-sama, kemampuan ini menyokong pelbagai aplikasi kompleks, meningkatkan ketepatan dan kemudahan penggunaan tanpa memerlukan pengaturcaraan atau penyediaan yang meluas.

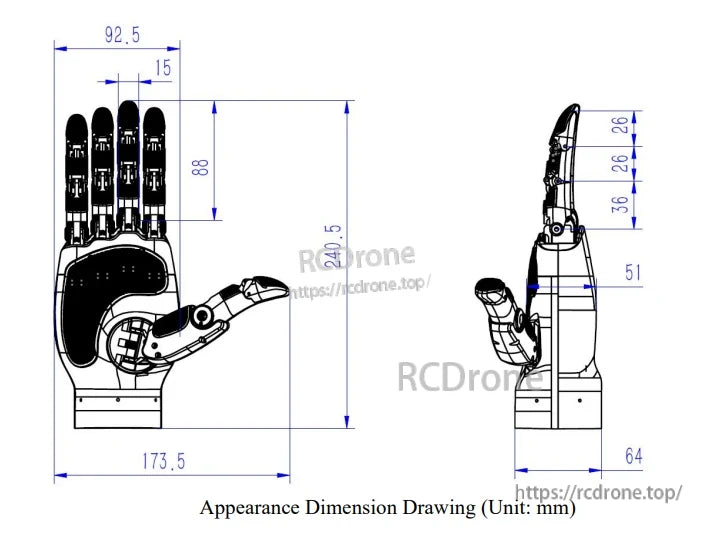
Dimensi tangan robot dalam milimeter, menunjukkan pandangan depan dan sisi dengan ukuran tepat untuk reka bentuk dan pemasangan.
Tangan Linker L10B menawarkan kawalan kedudukan dan kelajuan yang tepat, maklum balas haptik untuk pengurusan daya, dan peningkatan firmware dalam talian. Direka untuk ketepatan, keselamatan, dan kebolehsuaian dalam aplikasi industri dan penyelidikan yang memerlukan manipulasi halus dan prestasi jangka panjang.
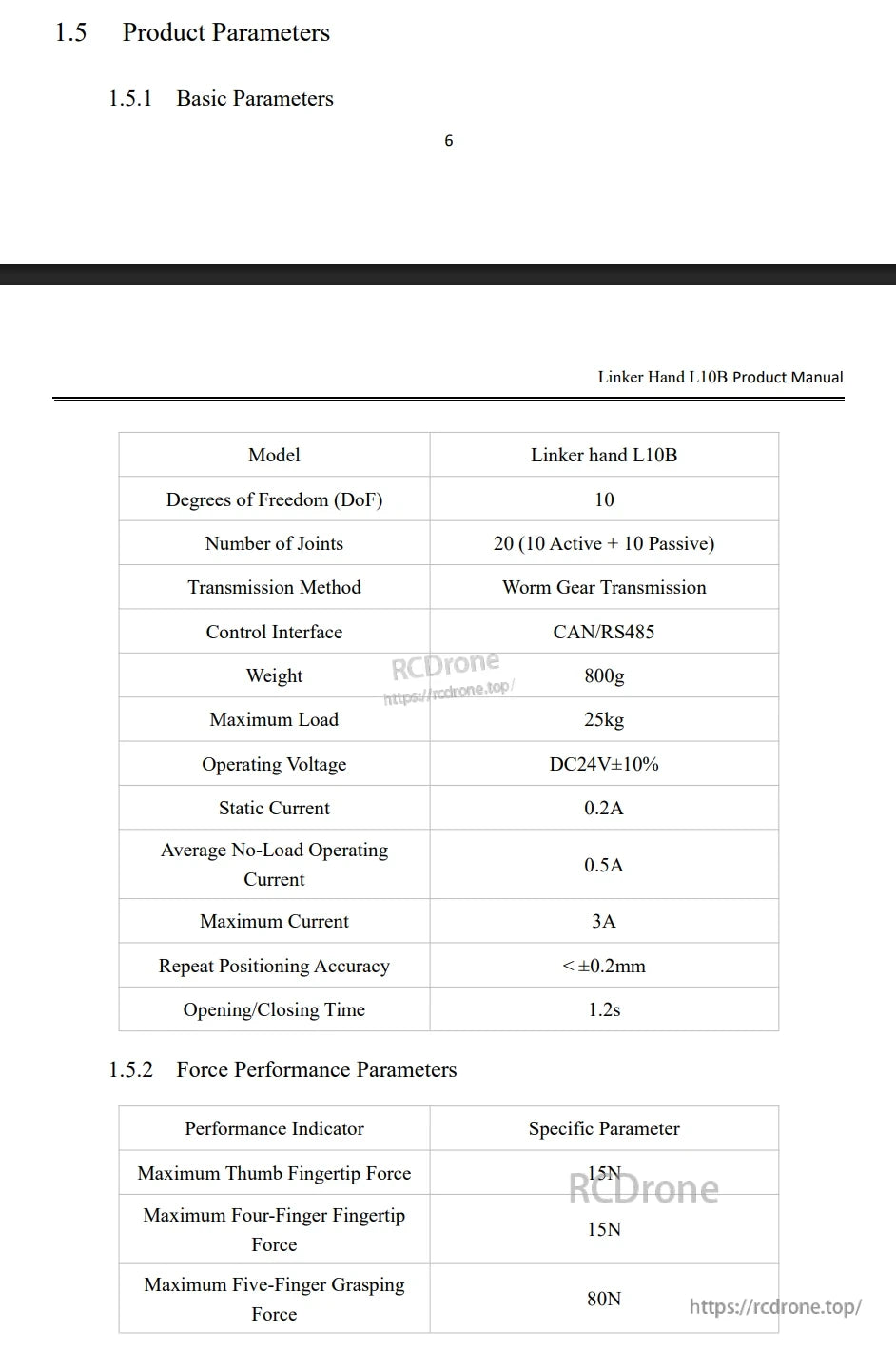
Tangan Linker L10B menawarkan 10 DoF, 20 sendi, penghantaran gear cacing, dan kawalan CAN/RS485. Berat 800g, ia mampu mengendalikan sehingga 25kg pada DC24V, memberikan kedudukan yang tepat dan daya genggaman sehingga 80N.

Menampilkan array piezoresistif 6x12 (jangka 20N, 100k kitaran). Sensor kapasitif pilihan: ≥50Hz pengambilan sampel, jangka 0–30N, resolusi arah 45°, mengesan logam atau badan manusia pada jarak 1cm.
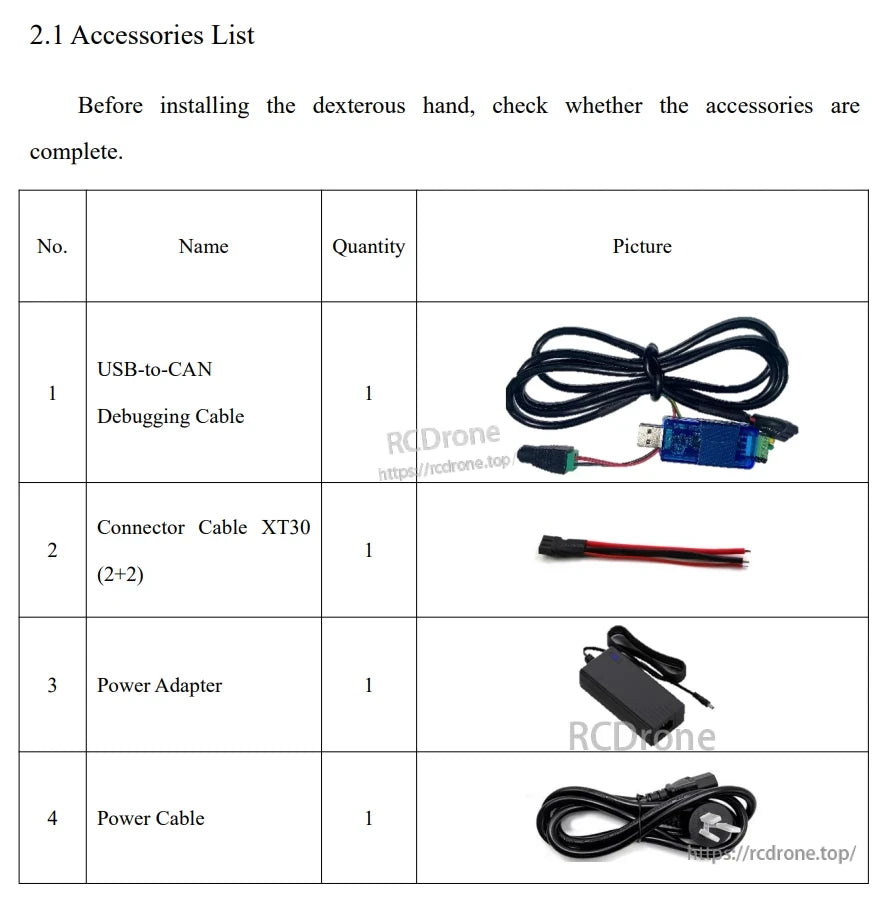
Senarai aksesori untuk pemasangan tangan yang cekap: kabel USB-ke-CAN, penyambung XT30, penyesuai kuasa, dan kabel kuasa, setiap satu kuantiti satu.
Related Collections













