







LINKERBOT Tangan Robot Linker Hand L6, 6 DoF, CAN, Pemacu Pautan, Cengkaman 50N, Kebolehulangan ±0.2mm
LINKERBOT Tangan Robot Linker Hand L6, 6 DoF, CAN, Pemacu Pautan, Cengkaman 50N, Kebolehulangan ±0.2mm
LINKERBOT
Tidak dapat memuatkan ketersediaan pengambilan
Overview
LINKERBOT Linker Hand L6 adalah Tangan Robot yang cekap direka untuk manipulasi yang tepat. Ia mempunyai 6 darjah kebebasan (DoF) dan 11 sendi (6 aktif + 5 pasif) dengan penghantaran pautan dan antara muka kawalan CAN. Struktur yang ditunjukkan dalam gambar produk menonjolkan jari-jari logam sepenuhnya, silikon tahan haus pada hujung jari, sensor tekanan sentuh lima jari, lampu penunjuk, pad getah separuh tapak tangan anti-jepit, dan silinder elektrik pemacu langsung berketepatan tinggi.
Ciri Utama
- Manipulasi cekap 6 DoF; 11 sendi (6 aktif + 5 pasif).
- Penghantaran pautan dengan kawalan bas CAN.
- Ketepatan penentuan semula: ±0.2mm.
- Keupayaan daya: daya maksimum hujung ibu jari 10N; daya maksimum hujung empat jari 8N; daya genggaman lima jari maksimum 50N.
- Array sensor sentuh lima jari piezoresistif untuk pengukuran sentuhan/tekanan.
- Elemen reka bentuk yang ditunjukkan: jari logam sepenuhnya, hujung silikon tahan lasak, lampu penunjuk, pad getah anti-jepit.
- Susun atur yang padat & lincah; sistem multi-sensor (termasuk kamera dan kulit elektronik) dan integrasi peranti-awan seperti yang digambarkan dalam imej produk.
Untuk jualan dan sokongan teknikal, hubungi [email protected] or lawati https://rcdrone.top/.
Spesifikasi
| Parameter | Nilai |
|---|---|
| Darjah Kebebasan (DoF) | 6 |
| Bilangan Sendi | 11 (6 Aktif + 5 Pasif) |
| Mod Transmisi | Transmisi Penghubung |
| Antara Muka Kawalan | CAN |
| Berat | 623.5g |
| Muatan Maksimum | 28kg |
| Voltan Operasi | DC24V±10% |
| Arus Statik | 0.2A |
| Arus Purata (Gerakan Tanpa Beban) | 0.75A |
| Arus Maksimum | 1.4A |
| Ketepatan Penentuan Ulang Posisi | ±0.2mm |
| Kuasa Hujung Maksimum Ibu Jari | 10N |
| Kuasa Hujung Maksimum Empat Jari | 8N |
| Kuasa Pegangan Maksimum Lima Jari | 50N |
Prestasi Pergerakan
| Bahagian Pergerakan | Julat Sudut (°) | Kelajuan Pergerakan (°/s) |
|---|---|---|
| Asas Ibu Jari | 57 | 152.82 |
| Asas Jari Telunjuk | 72.30 | 213.27 |
| Asas Jari Tengah | 72.90 | 208.29 |
| Asas Jari Manis | 73.10 | 202.49 |
| Asas Jari Kecil | 72.60 | 201.11 |
| Hujung Ibu Jari | 69.90 | 192.84 |
| Hujung Jari Telunjuk | 64.60 | 192.84 |
| Hujung Jari Tengah | 65.10 | 185.32 |
| Hujung Jari Manis | 66.90 | 185.32 |
| Hujung Jari Kecil | 66.70 | 184.76 |
| Ayunan Sisi Ibu Jari | 80 | 235.29 |
| Masa Pembukaan dan Penutupan | - | 0.35s |
Sensor
| Parameter | Spesifikasi |
|---|---|
| Array Piezoresistif | 6*12 |
| Luasan Beban Sensor | 9.6*14.4mm |
| Kuasa Pemicu | 5g |
| Julat Pengukuran | 20N |
| Hayat Perkhidmatan | 100,000 Kitaran |
| Kadar Rangka Komunikasi | 200FPS |
| Julat Nilai | 0~4095 |
Dimensi Penampilan
| Definisi | Parameter (mm) |
|---|---|
| Panjang dari hujung jari tengah ke pangkal tapak tangan | 190.7 |
| Lebar tapak tangan maksimum | 121 |
| Panjang dari hujung ibu jari ke pangkal tapak tangan | 134.3 |
| Ketinggian pergelangan tangan | 9.5 |
| Diameter pergelangan tangan | 60 |
Apa yang Termasuk
- Kabel debugging USB‑ke‑CAN x1
- Kabel penyambung XT30 (2+2) x1
- Penyesuai kuasa x1
- Kabel kuasa x1
- Linker Hand L6 x1
Aplikasi
- Pegangan dan pengendalian objek yang tepat
- Pegangan dan manipulasi alat
- Tugas pengambilan dan penempatan komponen
Manual
Manual Produk Linker Hand L6 (PDF)
Butiran


Tangan robotik yang cekap dan berprestasi tinggi dengan 6 darjah kebebasan. Menampilkan kelincahan yang padat, sistem multi-sensor, dan integrasi peranti-ke-awan untuk kawalan yang tepat, penyesuaian persekitaran, dan penyesuaian tanpa kod melalui perpustakaan kemahiran awan.



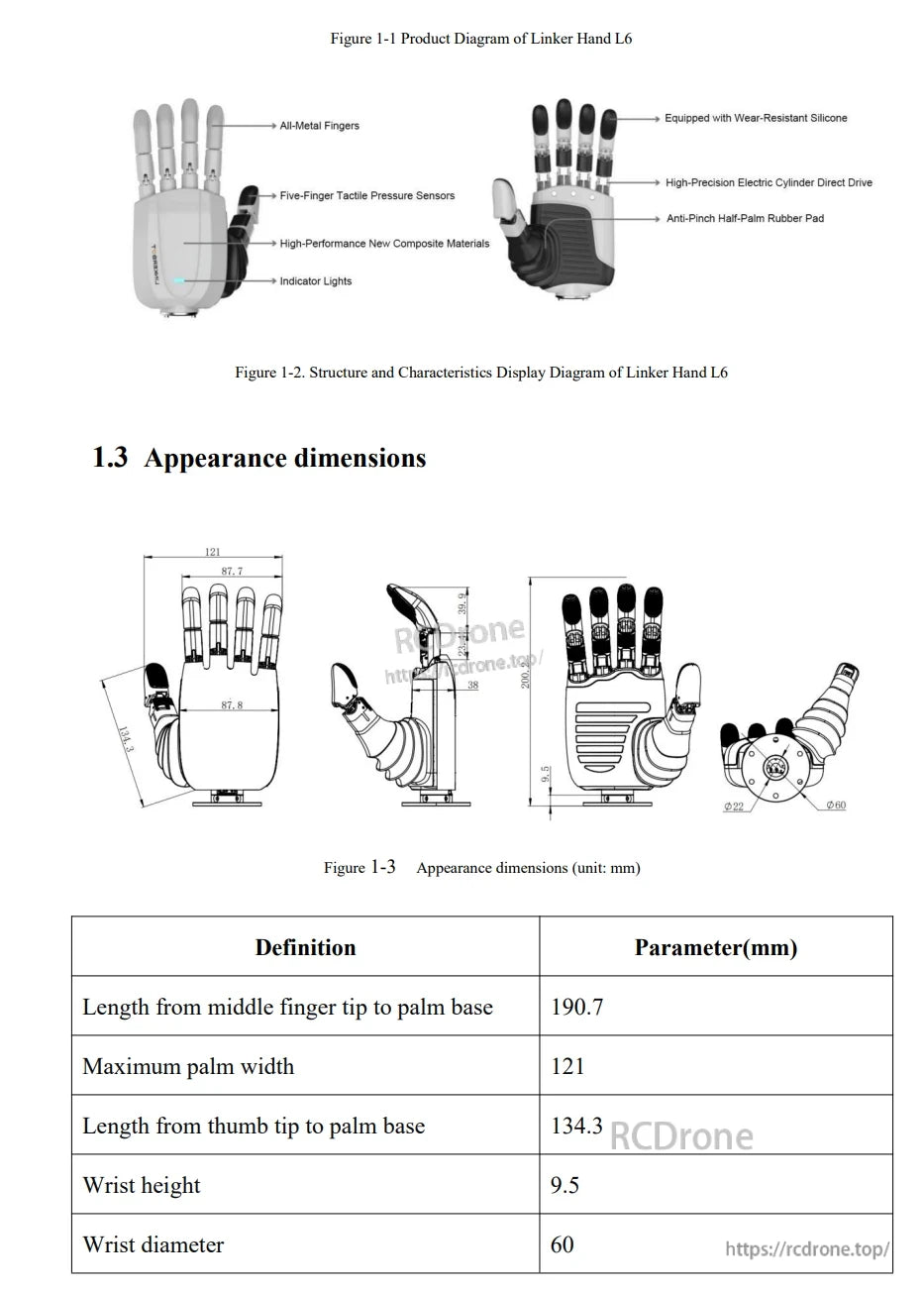
Tangan Linker L6 mempunyai jari logam sepenuhnya, sensor sentuh, silikon tahan lasak, pemacu silinder elektrik, dan pad getah anti-jepit. Panjang jari: 190.7mm; lebar tapak tangan: 121mm; diameter pergelangan tangan: 60mm.
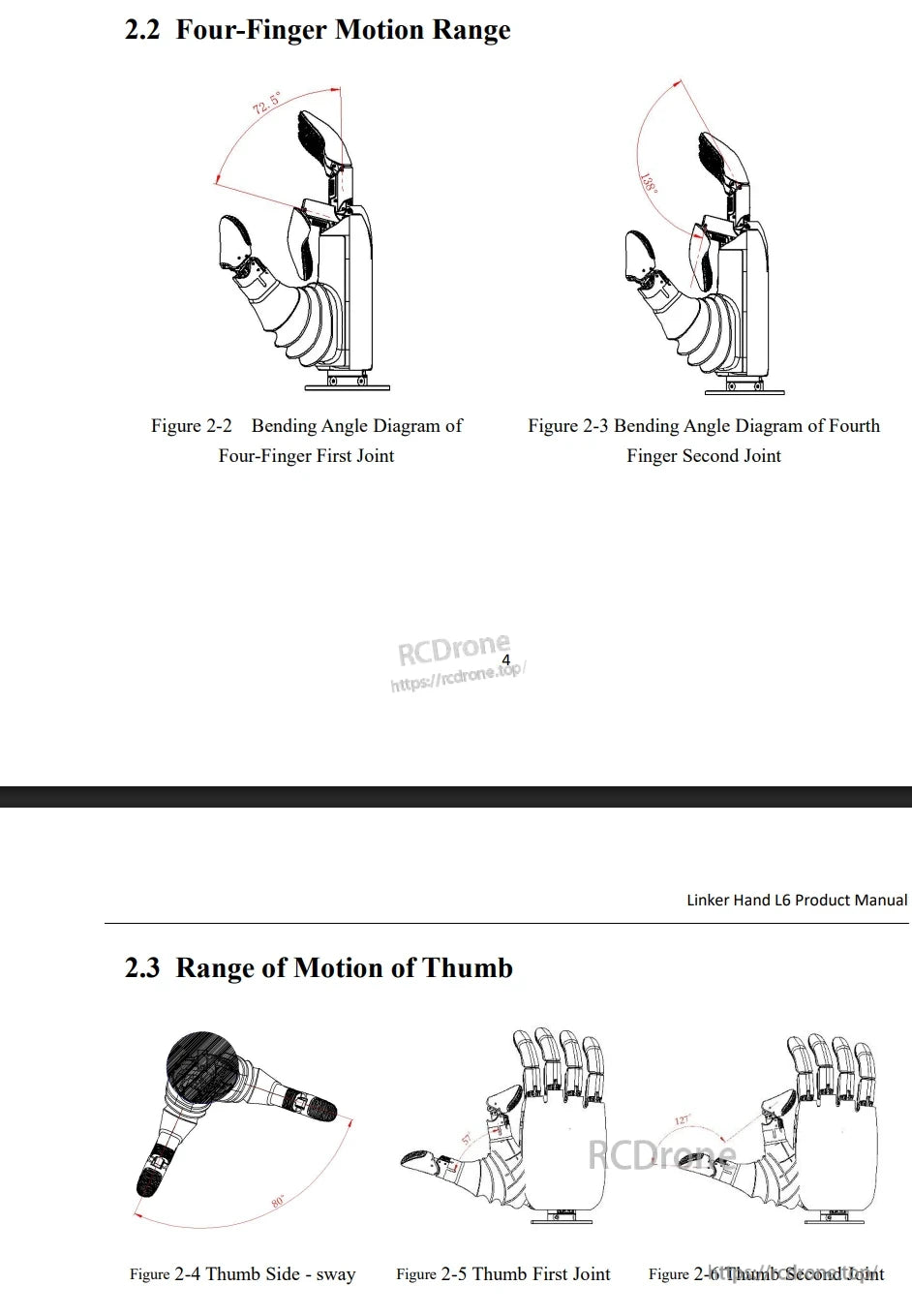
Julat gerakan sendi jari dan ibu jari: sendi pertama jari empat 72.5°, sendi kedua 138°; ayunan sisi ibu jari 80°, sendi pertama 57°, sendi kedua 127°.
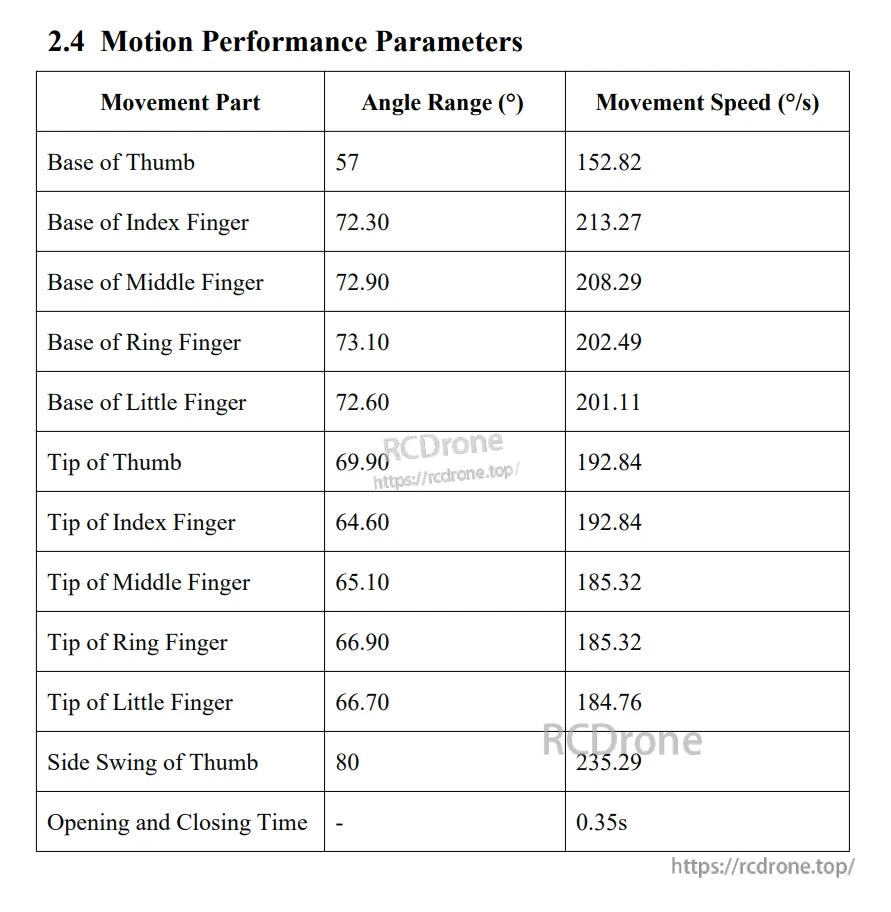
Parameter gerakan jari tangan robot: ayunan ibu jari pada 235.29°/s, pembukaan/penutupan dalam 0.35 saat—menunjukkan artikulasi tepat dengan julat sudut sendi dan kelajuan yang terperinci.
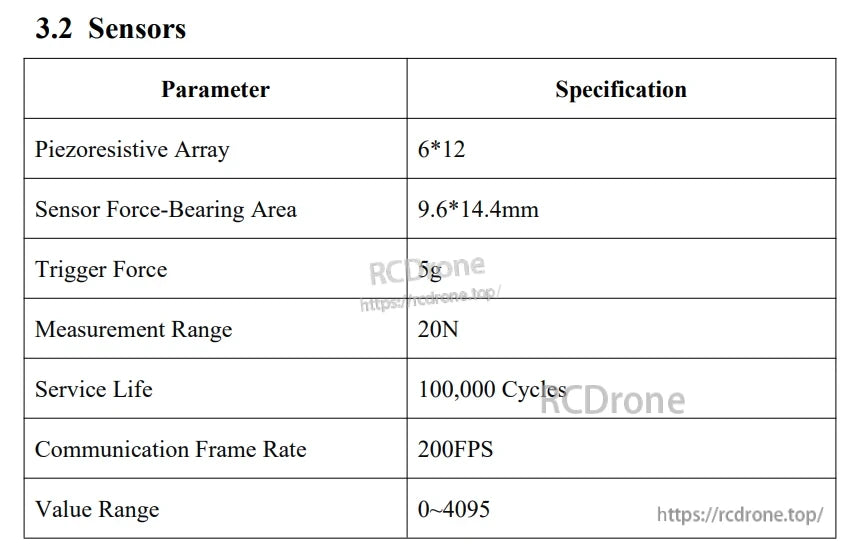
Spesifikasi sensor: susunan 6x12, kawasan 9.6x14.4mm, pencetus 5g, julat 20N, 100k kitaran, 200FPS, julat nilai 0-4095.
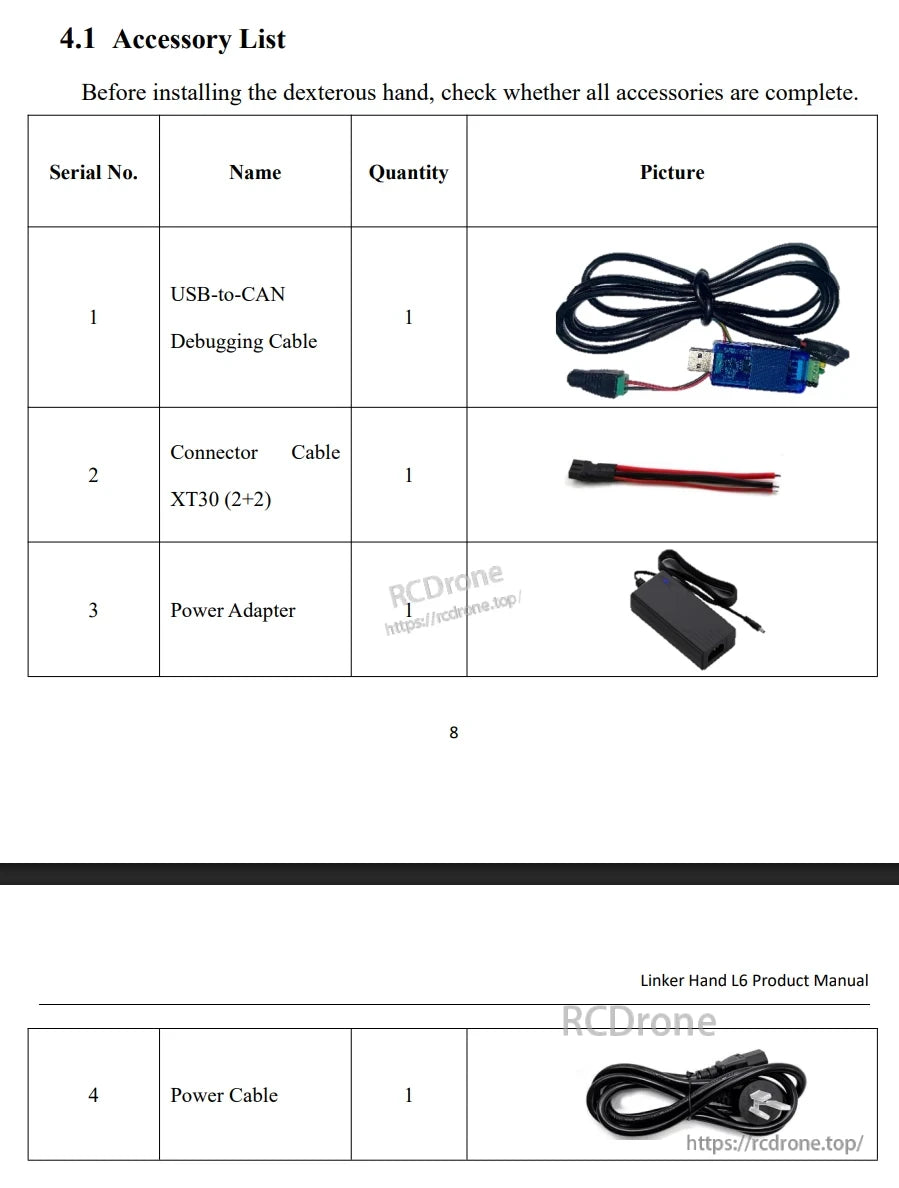
Senarai aksesori untuk Tangan Linker L6: kabel USB-to-CAN, penyambung XT30, penyesuai kuasa, dan kabel kuasa. Sahkan kelengkapan sebelum pemasangan.
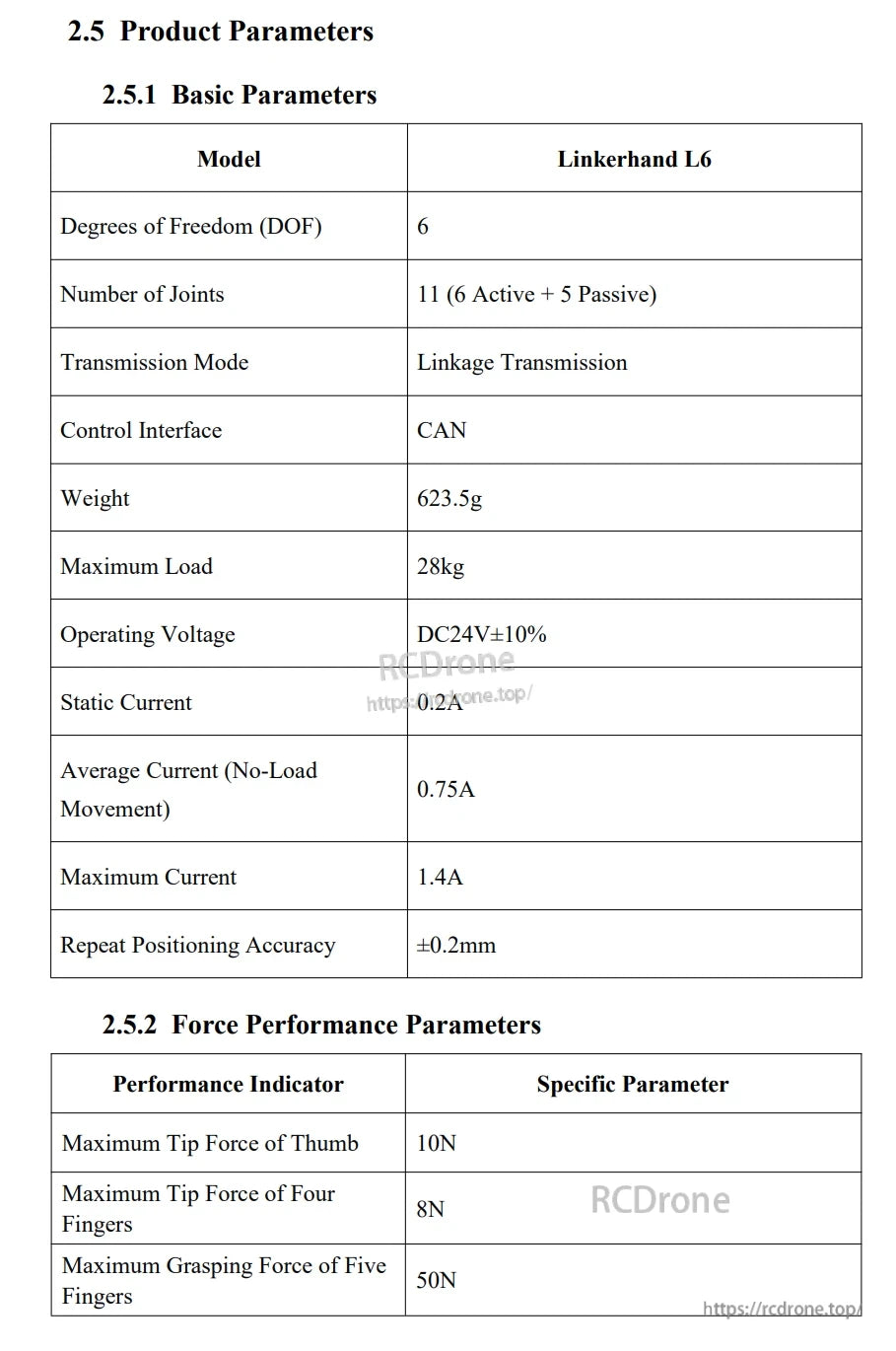
Tangan robot Linkerhand L6 mempunyai 6 DOF, 11 sendi, kawalan CAN, berat 623.5g, mampu mengendalikan beban maksimum 28kg, beroperasi pada DC24V±10%, menawarkan ketepatan ±0.2mm, dan memberikan daya genggaman sehingga 50N.
Related Collections







