







LINKERBOT Linker Hand O6 Tangan Robot, 6 DoF, 11 sendi, CAN/RS485, cengkaman 130N, ketepatan ±0.2mm, DC24V±10%
LINKERBOT Linker Hand O6 Tangan Robot, 6 DoF, 11 sendi, CAN/RS485, cengkaman 130N, ketepatan ±0.2mm, DC24V±10%
LINKERBOT
Tidak dapat memuatkan ketersediaan pengambilan
Overview
LINKERBOT Linker Hand O6 adalah tangan robot yang direka untuk integrasi kompak dan manipulasi yang tepat. Ia menyediakan 6 DoF dengan 11 sendi (6 aktif + 5 pasif), penghantaran gear cacing untuk pengaktifan yang stabil, kawalan CAN/RS485, dan pengesanan sentuhan pilihan. Struktur yang cekap memberikan sehingga 130N daya cengkaman lima jari dengan ketepatan penempatan ulang ±0.2mm pada voltan operasi DC24V±10%. Pembinaan ringan 370g dan jejak kecil menyokong pengendalian logistik, pemasangan industri, dan senario cengkaman berbentuk tidak teratur.
Ciri Utama
Kompak & Lincah
Reka bentuk struktur kompak mengurangkan beban peralatan sambil meningkatkan fleksibiliti untuk cengkaman yang tepat di ruang yang sempit.
Ketahanan Tinggi
Dibuat daripada aloi aluminium untuk kekuatan ringan dan ketahanan terhadap haus, menyokong prestasi stabil jangka panjang.
Integrasi Peranti-Awan
Integrasi peranti-awan membolehkan penyebaran cepat melalui perpustakaan kemahiran berasaskan awan dengan operasi dan penyesuaian yang dipermudahkan.
Spesifikasi
| Model | LINKERBOT Tangan Linker O6 |
| Darjah Kebebasan (DoF) | 6 |
| Bilangan Sendi | 11 (6 Aktif + 5 Pasif) |
| Mod Transmisi | Transmisi Gear Cacing |
| Antaramuka Kawalan | CAN/RS485 |
| Berat | 370g |
| Muatan Maksimum | 30kg |
| Voltan Operasi | DC24V±10% |
| Ketepatan Penentuan Semula Posisi | ±0.2mm |
| Sensor Taktile | Pilihan |
| Kuasa Hujung Ibu Jari Maksimum | 28N |
| Kuasa Maksimum Hujung Empat Jari | 33N |
| Kuasa Cengkaman Maksimum Lima Jari | 130N |
| Dimensi (Penampilan) | Ketinggian 177mm; Lebar 76.5mm; Ketebalan 40mm |
Julat Pergerakan
| LF2, RF2, MF2, FF2 (Bengkok) | 90° |
| LF1, RF1, MF1, FF1 (Bengkok) | 80° |
| JARI1 (Bengkok) | 55° |
| JARI2 (Bengkok) | 30° |
| JARI3 (Sisi - goyang) | 88° |
Apa yang Termasuk
- Kabel Pembaikan USB-ke-CAN ×1
- Kabel Penyambung XT30 (2+2) ×1
- Penyesuai Kuasa ×1
- Kabel Kuasa ×1
- Linker Tangan O6 x1
Untuk jualan atau sokongan teknikal, hubungi [email protected] or lawati https://rcdrone.top/.
Permohonan
- Pengendalian logistik dan pemindahan bahan
- Pemasangan industri dan manipulasi alat
- Pegangan stabil bentuk tidak teratur dan barang pengguna
Manual
Linker_Hand_O6_Product_Manual.pdf
Butiran

Linker Hand O6 menawarkan 6 sendi aktif dan 5 sendi pasif untuk pegangan yang tepat dan kuat. Reka bentuk aluminium yang padat dan tahan lama sesuai untuk logistik, pemasangan, dan pegangan tidak teratur. Menampilkan integrasi awan untuk latihan AI yang mudah tanpa pengkodan.


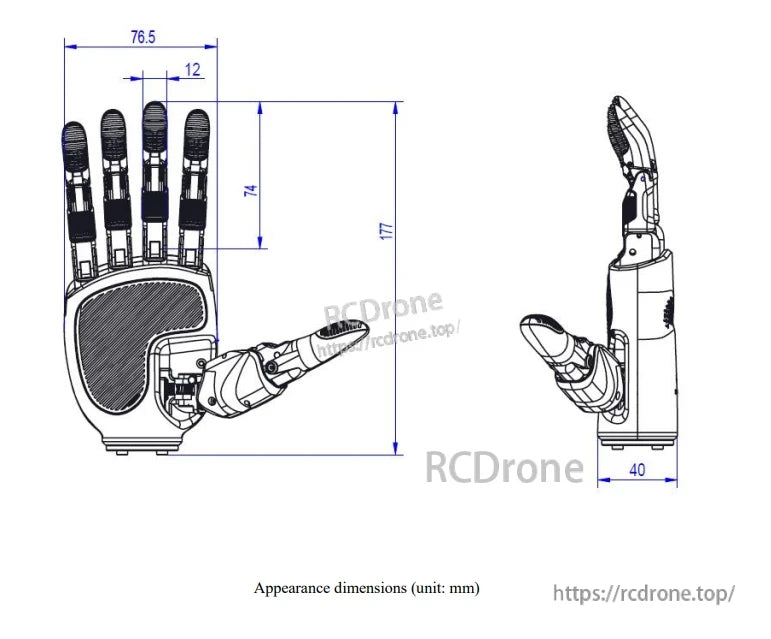
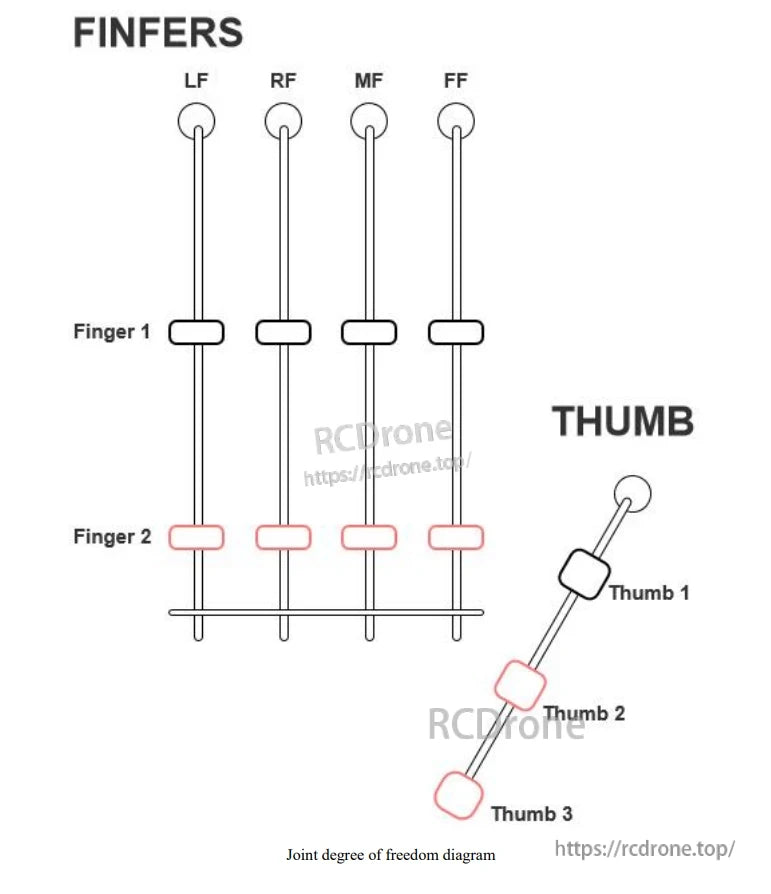
Diagram darjah kebebasan sendi jari dan ibu jari
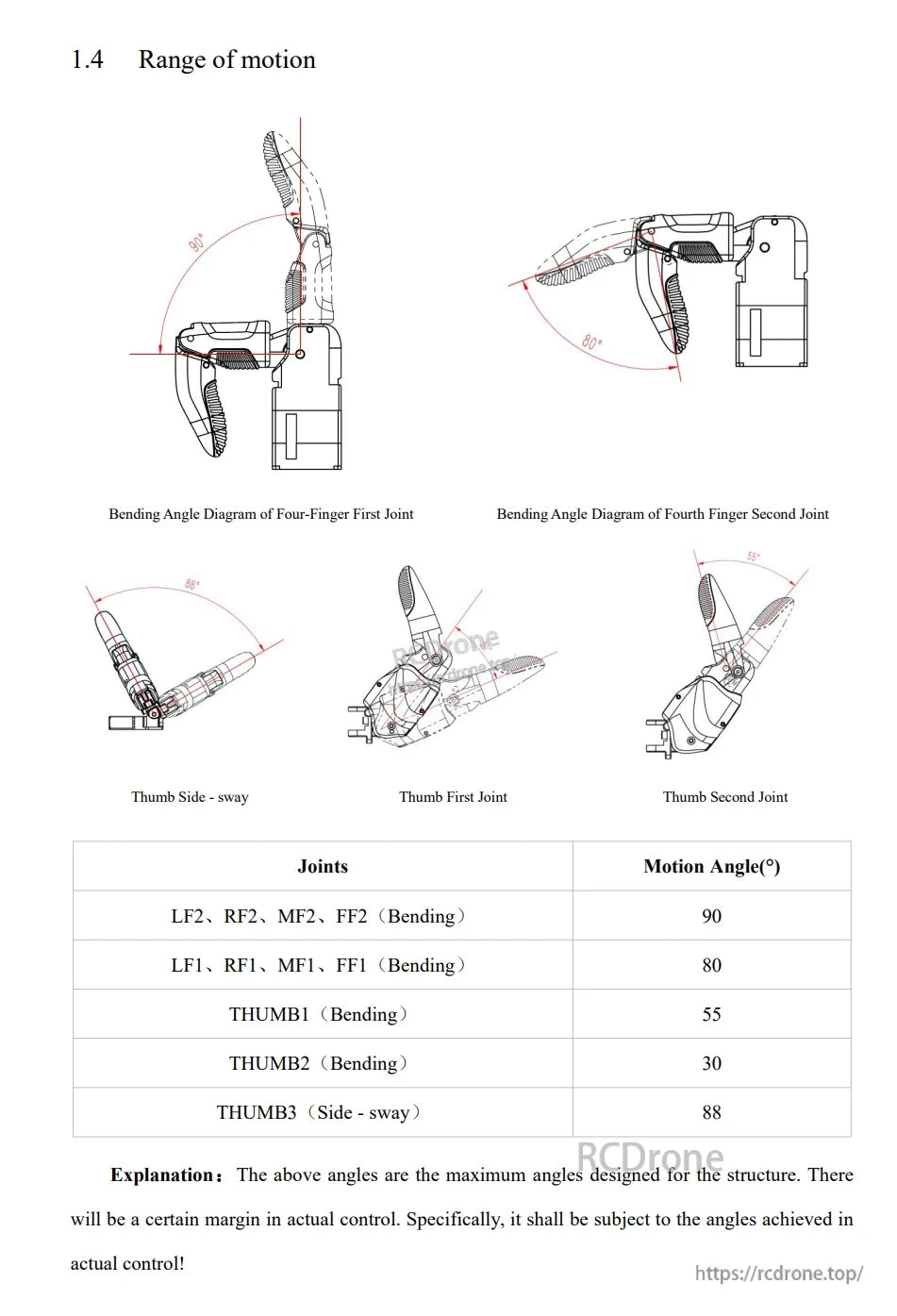
Jari membengkok 80–90°, ibu jari membengkok 30–55°, dan ayunan sisi mencapai 88°. Ini adalah sudut maksimum yang direka; kawalan sebenar mungkin sedikit berbeza.
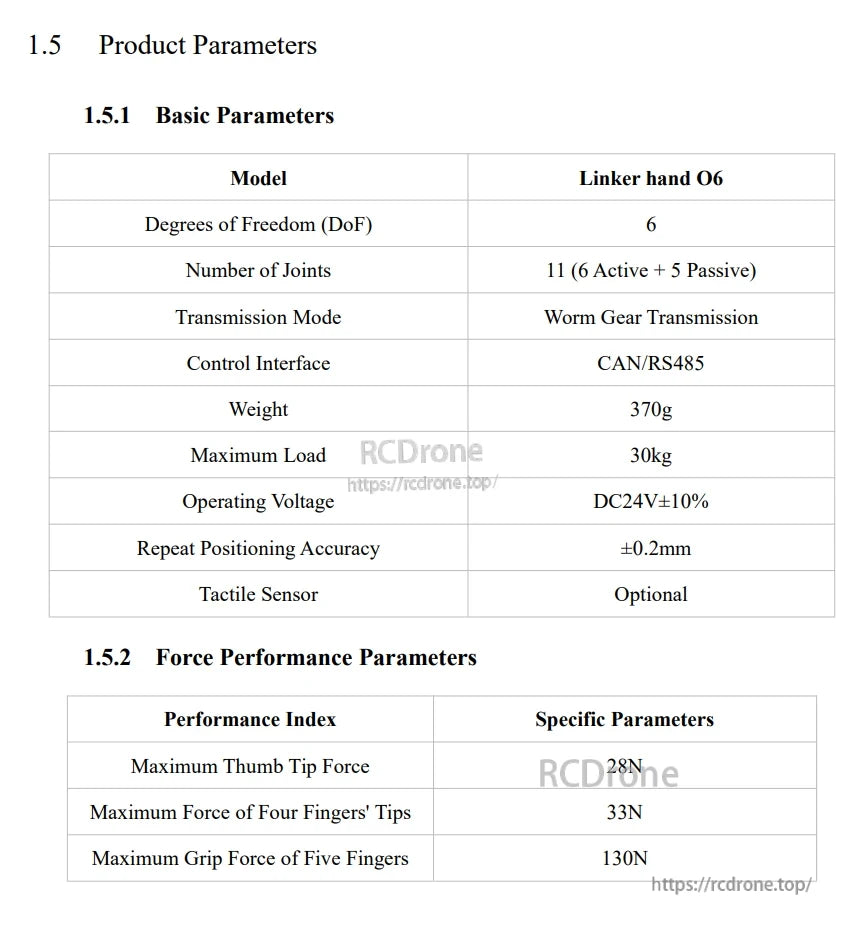
Tangan robot Linker Hand O6 mempunyai 6 DoF, 11 sendi, penghantaran gear cacing, kawalan CAN/RS485, berat 370g, mampu mengendalikan beban maksimum 30kg, beroperasi pada DC24V±10%, ketepatan ±0.2mm, dan menawarkan sensor sentuh pilihan dengan prestasi daya yang ditentukan.

Senarai aksesori untuk pemasangan tangan yang cekap: kabel USB-ke-CAN, penyambung XT30, penyesuai kuasa, dan kabel kuasa—semua kuantiti satu.
Related Collections







