



Motor LKMTECH MF4005-V2 12V RS485/CAN Pengekod Magnetik 18bit Pilihan Pemacu DF40V2 untuk Robotik
Motor LKMTECH MF4005-V2 12V RS485/CAN Pengekod Magnetik 18bit Pilihan Pemacu DF40V2 untuk Robotik
LKMTECH
Tidak dapat memuatkan ketersediaan pengambilan
Gambaran keseluruhan
LKMTECH MF4005-V2 adalah motor yang direka untuk aplikasi mekatronik terintegrasi yang memerlukan reka bentuk ringan, ketepatan kawalan yang tinggi, dan output tork yang tinggi. Kemas kini MF4005 V2 menonjolkan: resolusi pengodernya ditingkatkan dari 14-bit kepada 18-bit, pengoptimuman tork cogging, sokongan input PWM, dan komunikasi CAN/RS485 dengan pelbagai pilihan baud-rate.
Ciri Utama
- Reka bentuk terintegrasi: integrasi mekanikal-elektrik
- Reka bentuk ringan: reka bentuk meratakan aloi aluminium aeroangkasa
- Ketepatan kawalan tinggi: pengodak magnet (kemas kini MF4005 V2 menunjukkan peningkatan 14-bit kepada 18-bit)
- Keluaran tork tinggi: magnet kekal RbFeB berprestasi tinggi
- Menyokong input PWM
- Komunikasi: CAN atau RS485
- Fungsi pemacu: boleh bertukar antara mod tork, mod kelajuan dan mod kedudukan
- Kawalan utama: pemproses ARM Cortex-M4 32-bit berkecekapan tinggi (pemacu)
- Pemantauan suhu stator secara masa nyata (pemacu)
- Fasa kuasa pemacu: litar jambatan penuh dengan rintangan dalaman rendah dan arus tinggi
- Pengodak magnet nilai mutlak satu putaran 18-bit (teks ciri pemacu); satu kalibrasi, kedudukan sifar tidak pernah hilang
- Catatan pembinaan motor: rotor luaran; reka bentuk lengkung pelbagai peringkat magnet kekal; jurang udara yang lebih kecil; magnetisasi radial; 0.2 mm lembaran keluli silikon; wayar enamel terisolasi kelas H; wayar NdFeB gred SH
- perkhidmatan OEM/ODM (bukan spesifikasi produk)
- Perisian parameter: perisian program yang disediakan untuk menyesuaikan parameter, menguji dan menaik taraf; menyokong pembangunan sumber terbuka seperti PC, MCU, PLC, ICP dan RPi
Senario Aplikasi
- Robot Humanoid
- Tangan Robot
- Exoskeleton
- Robot Berkaki Empat
- Kenderaan AGV
- Robot ARU
- Kamera PTZ
- Laser Lidar
- Robot Pemeriksaan Stesen Kuasa
- Pemeriksaan Industri
Spesifikasi
Model motor: MF4005-V2
| Parameter | Nilai (25 pusingan) | Nilai (40 pusingan) |
|---|---|---|
| Nama Item | MF4005-V2 | MF4005-V2 |
| Pusingan | 25 | 40 |
| Voltan Dinilai | 12V | 12V |
| Kelajuan Maksimum | 2390RPM | 1300RPM |
| Tork Dinilai | 0.07 N.m | 0.06 N.m |
| Kelajuan Dinilai | 1600RPM | 700RPM |
| Arus Dinilai | 1.44A | 0.81A |
| Kuasa Maksimum | 14W | 4.6W |
| Tork Maksimum | 0.25 N.m | 0.12 N.m |
| Konstanta Kelajuan | 133 rpm/V | 58 rpm/V |
| Konstanta Tork | 0.05 N.m/A | 0.07 N.m/A |
| Jenis Penggulungan | Y | Y |
| Rintangan Fasa | 1.9Ω | 4.3Ω |
| Induktans Fasa | 0.5mH | 1.2mH |
| Pole Motor | 26 | 26 |
| Inersia Rotor | 56 gcm² | 56 gcm² |
| Suatu Suhu Motor | YA | YA |
| Beban Terperingkat Galas | 140N | 140N |
| Berat Motor | 65g | 65g |
| Cadangan Pemanduan | DF40V2 | DF40V2 |
| Voltan Input Pemanduan | 7.4-32V | 7.4-32V |
| Komunikasi | RS485 ATAU CAN | RS485 ATAU CAN |
| Frekueansi Komunikasi | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Pengodam | Pengodam Magnetik 18bit | Pengodam Magnetik 18bit |
| Kelajuan Baud Pengodam (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Kelajuan Baud (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Mod Kawalan | Gelung Tork (24KHz) / Gelung Kelajuan (8KHz) / Gelung Kedudukan (8KHz) | Gelung Tork (24KHz) / Gelung Kelajuan (8KHz) / Gelung Kedudukan (8KHz) |
| Lengkung Pecutan | Pecutan Trapeziod | Percepatan Trapeziod |
Definisi Antara Muka
Switch ID: SWITCH ID
| Antara Muka | Nota |
|---|---|
| A/L | RS485-A atau CAN-L |
| B/H | RS485-B atau CAN-H |
| V+ | Bekalan Kuasa Positif |
| V+ | Bekalan Kuasa Positif |
| V- | Bekalan Kuasa Negatif |
| V- | Bekalan Kuasa Negatif |
| T | Penghantar UART |
| R | Penerima UART |
| G | GND Isyarat |
Untuk sokongan pra-jualan atau integrasi (persediaan RS485/CAN, pemilihan kadar baud, dan fail CAD), hubungi [email protected] or lawati https://rcdrone.top/.
Manual / Fail
Butiran

MF4005‑V2 mengintegrasikan motor, pengod, dan ciri pemacu untuk pembinaan robotik yang padat, dengan pengod magnet 18-bit yang ditingkatkan dan pilihan komunikasi CAN/RS485.
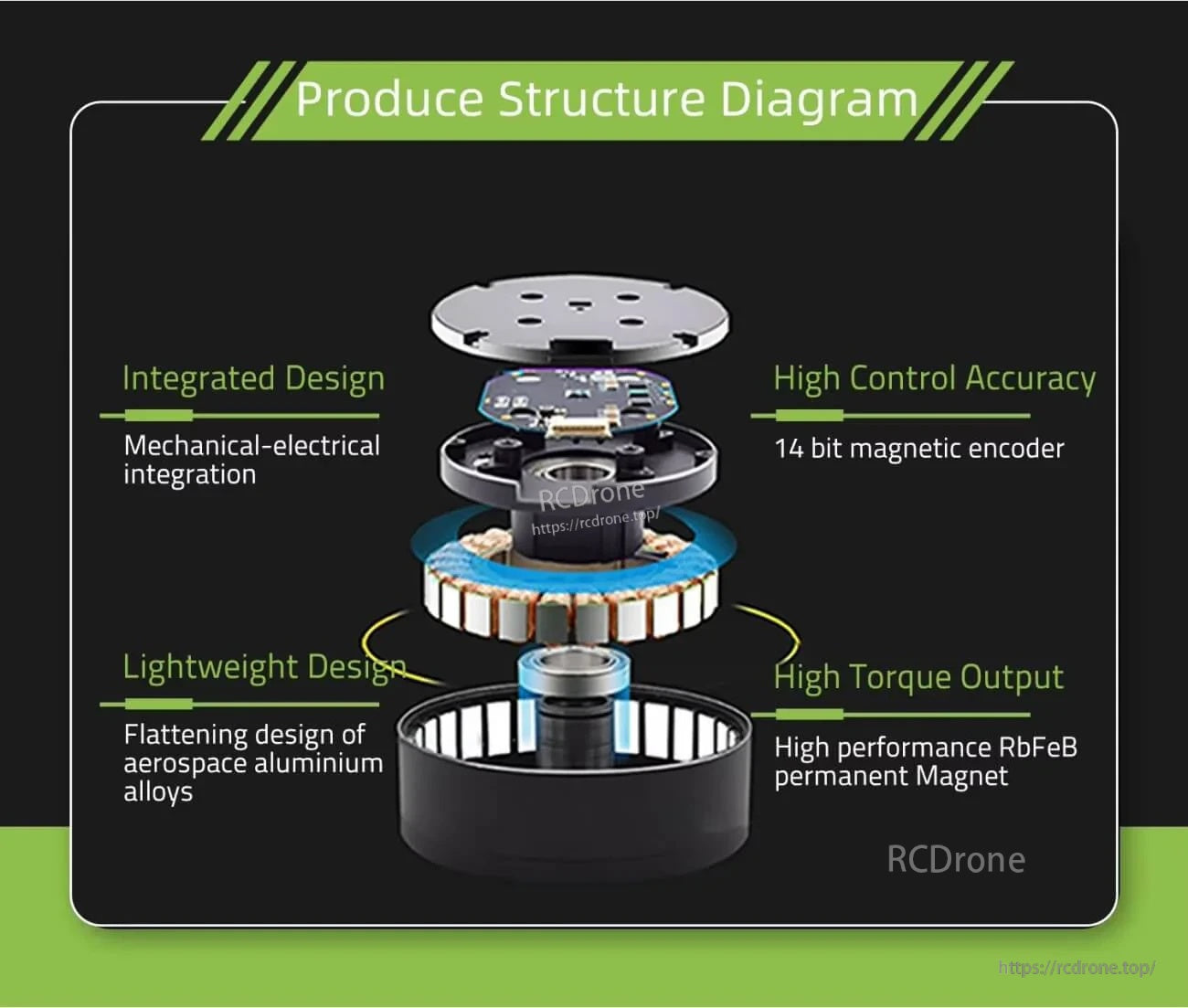
Reka bentuk yang ringan dan terintegrasi menggabungkan elektronik pemacu dengan pemasangan motor untuk menyokong kawalan yang tepat dan output tork yang tinggi.
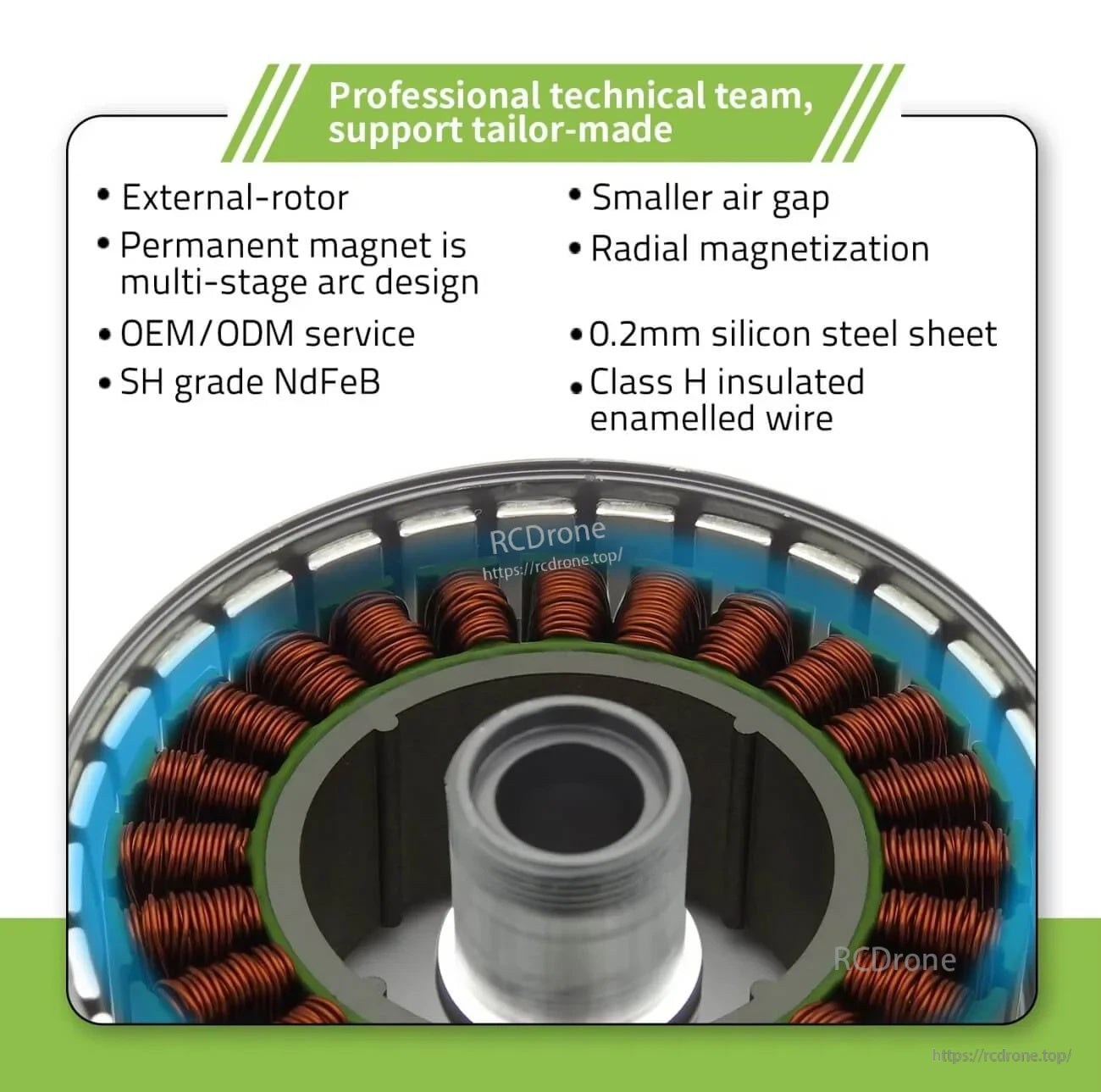
Reka bentuk rotor luaran dan susun atur penggulungan yang padat membantu menyeimbangkan saiz, responsif, dan tork untuk sendi robotik dan penggerak.
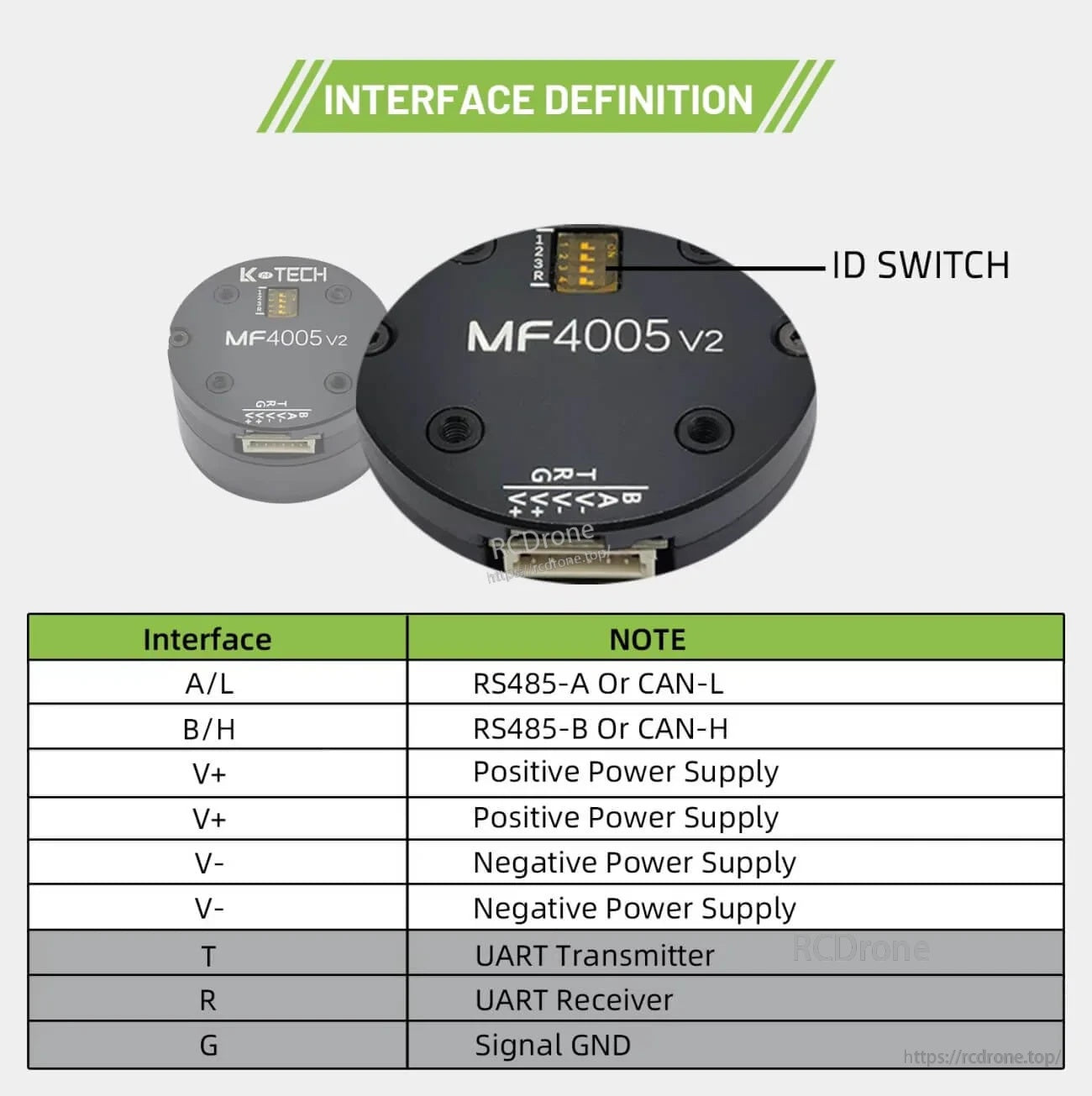
Penyambungan dipermudahkan dengan penyambung yang dilabel dengan jelas dan suis ID untuk persediaan bas menggunakan RS485 atau CAN.
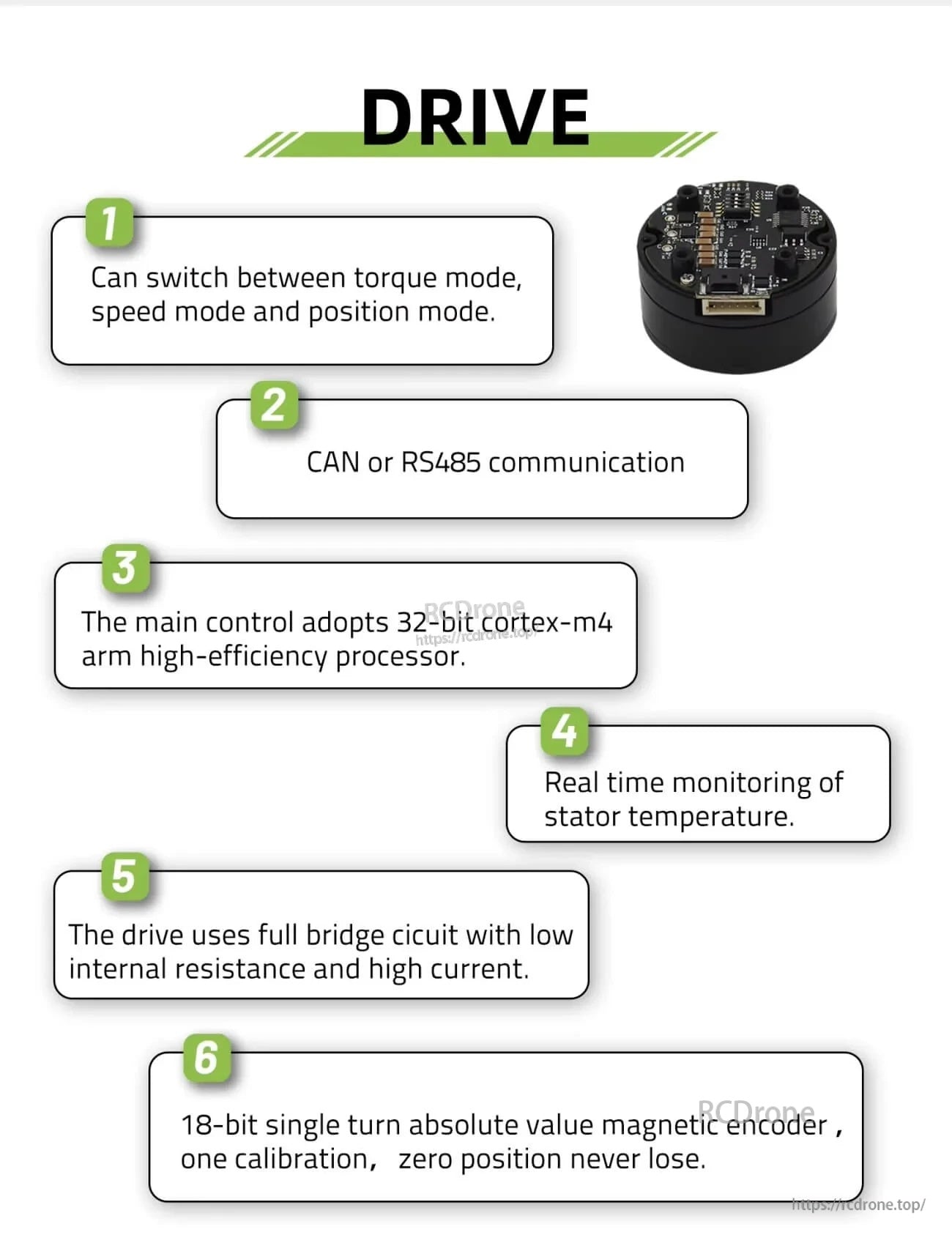
Kemampuan pemacu termasuk tork, kelajuan, dan mod kedudukan yang boleh dipilih, serta pemantauan suhu stator masa nyata melalui CAN atau RS485.
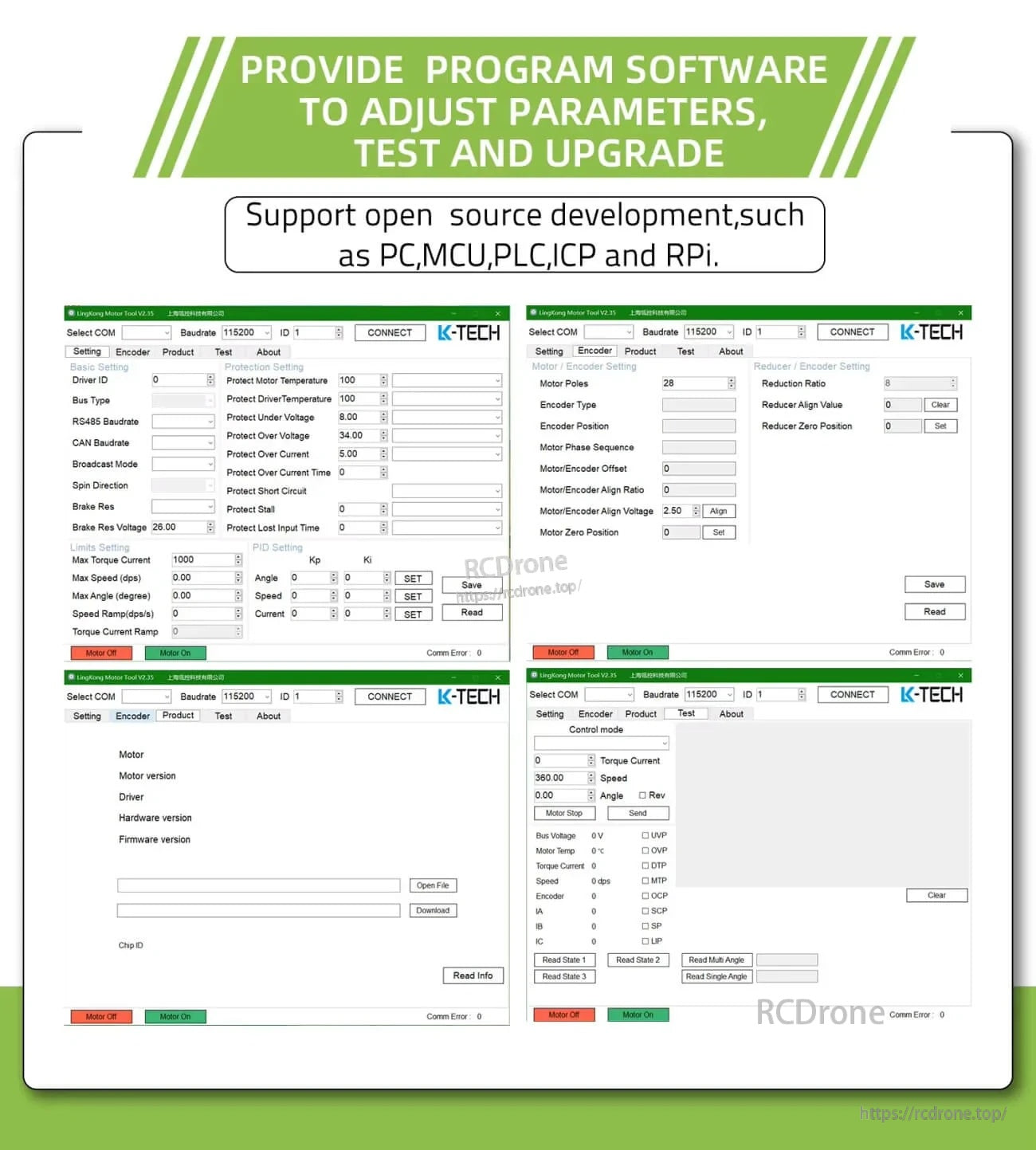
Sokongan perisian PC membantu dengan penyetelan parameter, pengujian, dan peningkatan, dengan pilihan yang sesuai untuk aliran kerja pembangunan.
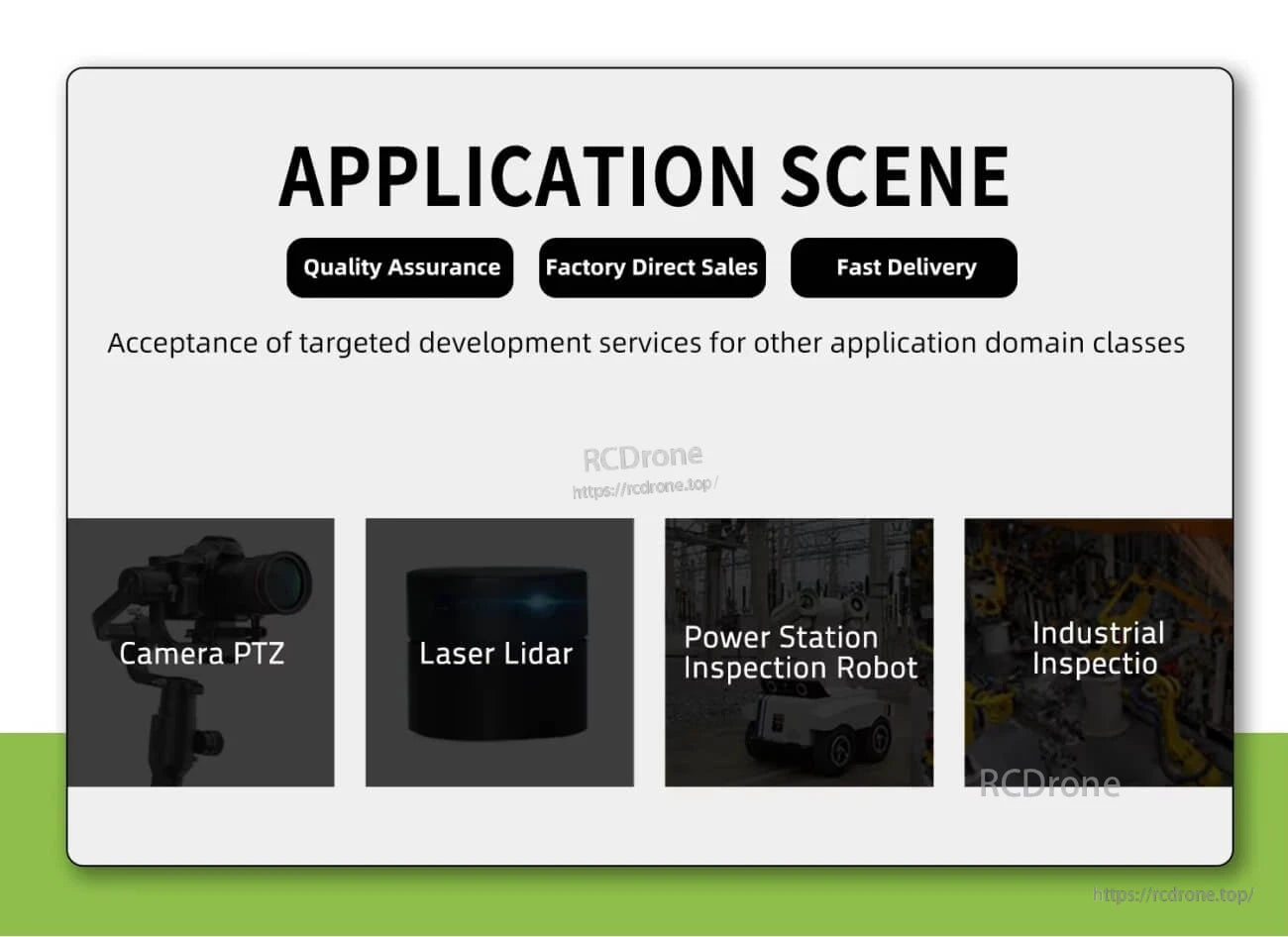
Bidang aplikasi biasa termasuk kepala kamera PTZ, sistem lidar, dan robot pemeriksaan yang digunakan dalam persekitaran industri.
Related Collections



