




Motor LKMTECH MG4010E-i10-V3 24V 320RPM 2.5N.m Pengurang Gear Planetari 1:10 RS485/CAN Pengekod
Motor LKMTECH MG4010E-i10-V3 24V 320RPM 2.5N.m Pengurang Gear Planetari 1:10 RS485/CAN Pengekod
LKMTECH
Tidak dapat memuatkan ketersediaan pengambilan
Tinjauan
Motor LKMTECH MG4010E-i10-V3 adalah motor tanpa berus motor dengan pengurang gear planet dan pengod encoders magnet mutlak, direka untuk penggerak robot dan automasi yang memerlukan ketepatan tinggi, tork besar, dan kawalan gelung tertutup yang stabil. Ia menyokong komunikasi RS485 atau CAN bus dan berfungsi dengan pemacu DG40E yang disyorkan (voltan input 7.4-32V).
Ciri Utama
- Reka bentuk standard tinggi; kuasa tinggi, tork besar, ketepatan tinggi
- Motor tanpa berus berkuasa tinggi + pengurang gear planet ketepatan tinggi
- Kawalan prestasi tinggi FOC (ciri berkaitan pemanduan)
- Duplex pengod; mengingati titik sifar selepas dimatikan (output nilai mutlak untuk satu pusingan)
- Pengod sisi motor: pengod magnet mutlak pusingan tunggal 18-bit
- Pengod sisi pengurang: pengod magnet mutlak pusingan tunggal 14-bit
- Antara muka sensor suhu dupleks untuk pemantauan suhu motor dan pemacu secara masa nyata (suhu motor: YA)
- Switch ID (ditunjukkan pada badan motor)
Spesifikasi
| Nama Item | MG4010E-i10-V3 |
| Voltan Dinilai | 24V |
| Kelajuan Maksimum | 320RPM |
| Kelajuan Dinilai | 260RPM |
| Tork Dinilai | 2.5N.m |
| Tork Maksimum | 4.5N.m |
| Arus Dinilai | 3.5A |
| Kuasa Maksimum | 140W |
| Kelajuan tetap | 108.3rpm/V |
| Tork Tetap | 0.07N.m/A |
| Pusingan | 14 |
| Jenis Penggulungan | Y |
| Rintangan Fasa | 0.604Ω |
| Induktans Fasa | 0.28mH |
| Tiang Motor | 28 |
| Inersia Rotor | 202gcm² |
| Suasana Motor | YA |
| Jenis Pengurang | PG4210 |
| Nisbah Pengurangan | 1:10 |
| Backlash | ≤8 arcmin (teks gambar juga menyatakan: backlash gear 6 arcmin) |
| Beban Terperingkat Galas | 1000N |
| Berat Motor | 250g |
| Saiz | Φ53*41 |
| Cadangan Pemanduan | DG40E |
| Voltan Input Pemanduan | 7.4-32V |
| Komunikasi | RS485 ATAU CAN |
| Frekuesi Komunikasi | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Pengodam | 18bit(motor)+14bit(pengurang)Pengodam Magnet |
| Kelajuan Baud Pengodam (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Kelajuan Baud (CAN) | 100K, 125K, 250K, 500K, 1M |
| Mod Kawalan | Gelung Tork(24KHz)/Gelung Kelajuan(8KHz)/Gelung Kedudukan(4KHz) |
| Lengkung Pecutan | Pecutan Trapeziod |
Definisi Antara Muka
| A/H | RS485-A Atau CAN-H |
| B/L | RS485-B Atau CAN-L |
| V- | Bekalan Kuasa Negatif |
| V+ | Bekalan Kuasa Positif |
| A/H | RS485-A Atau CAN-H |
| B/L | RS485-B Atau CAN-L |
| T | Pemancar UART |
| R | Penerima UART |
| G | GND Isyarat |
Senario Aplikasi
- Robot Humanoid
- Tangan Robot
- Exoskeleton
- Robot Berkaki Empat
- Kenderaan AGV / kereta AGV
- Robot ARU
- Anjing Robot
- Robot Boleh Dipakai
Untuk pertanyaan integrasi (tetapan RS485/CAN, pemilihan kadar baud pengodok, atau padanan pemacu), hubungi [email protected] or lawati https://rcdrone.top/.
Manual
Butiran

Dibina untuk penggerak robotik yang memerlukan tork tinggi, ketepatan tinggi, dan kawalan gelung tertutup yang stabil.

Komunikasi RS485 atau CAN bus menyokong integrasi fleksibel dengan pengawal dan pemacu robot yang biasa.
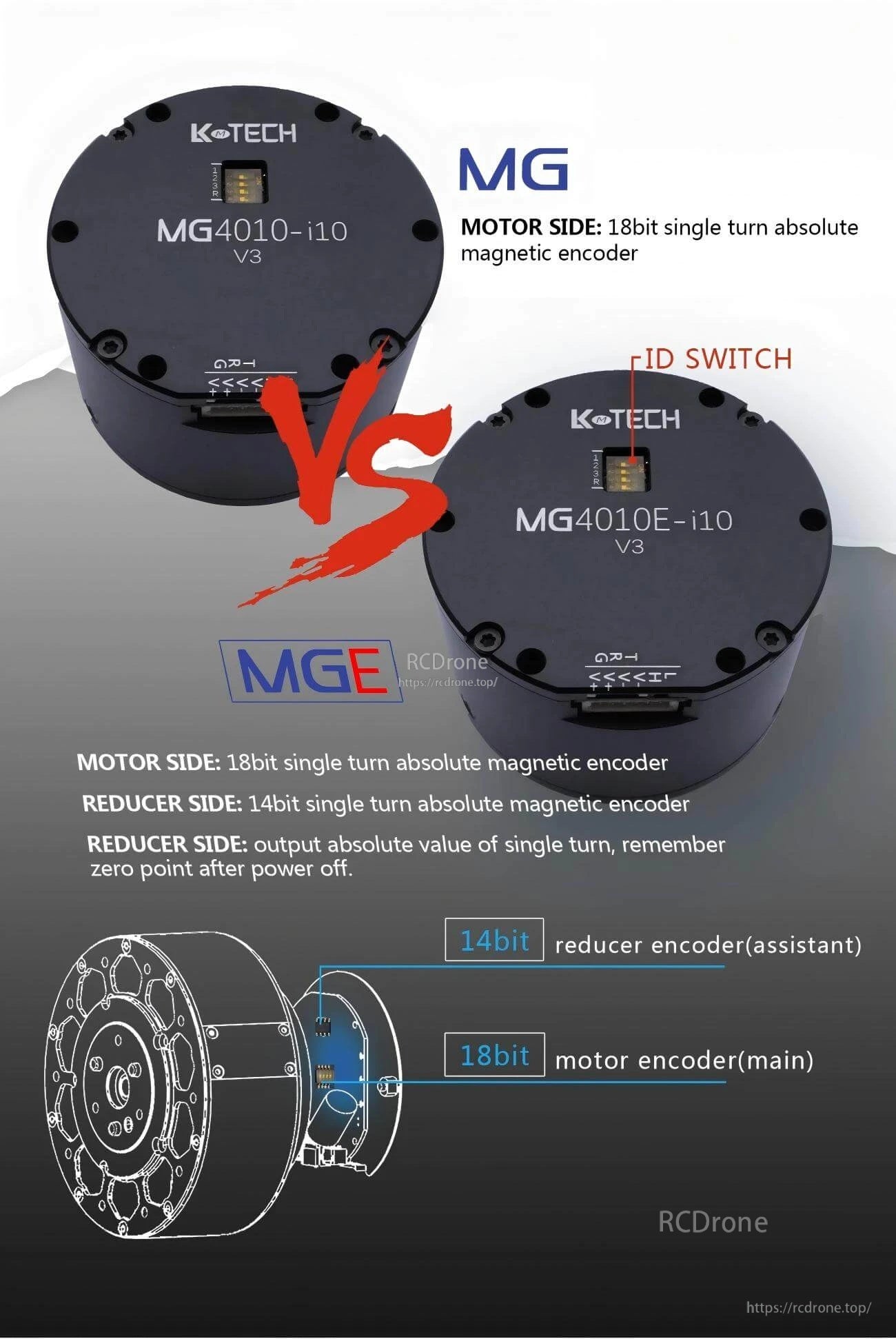
Pengodak mutlak dwi (motor + pengurang) membantu mengekalkan titik sifar selepas pemadaman kuasa untuk penentuan kedudukan yang boleh diulang.
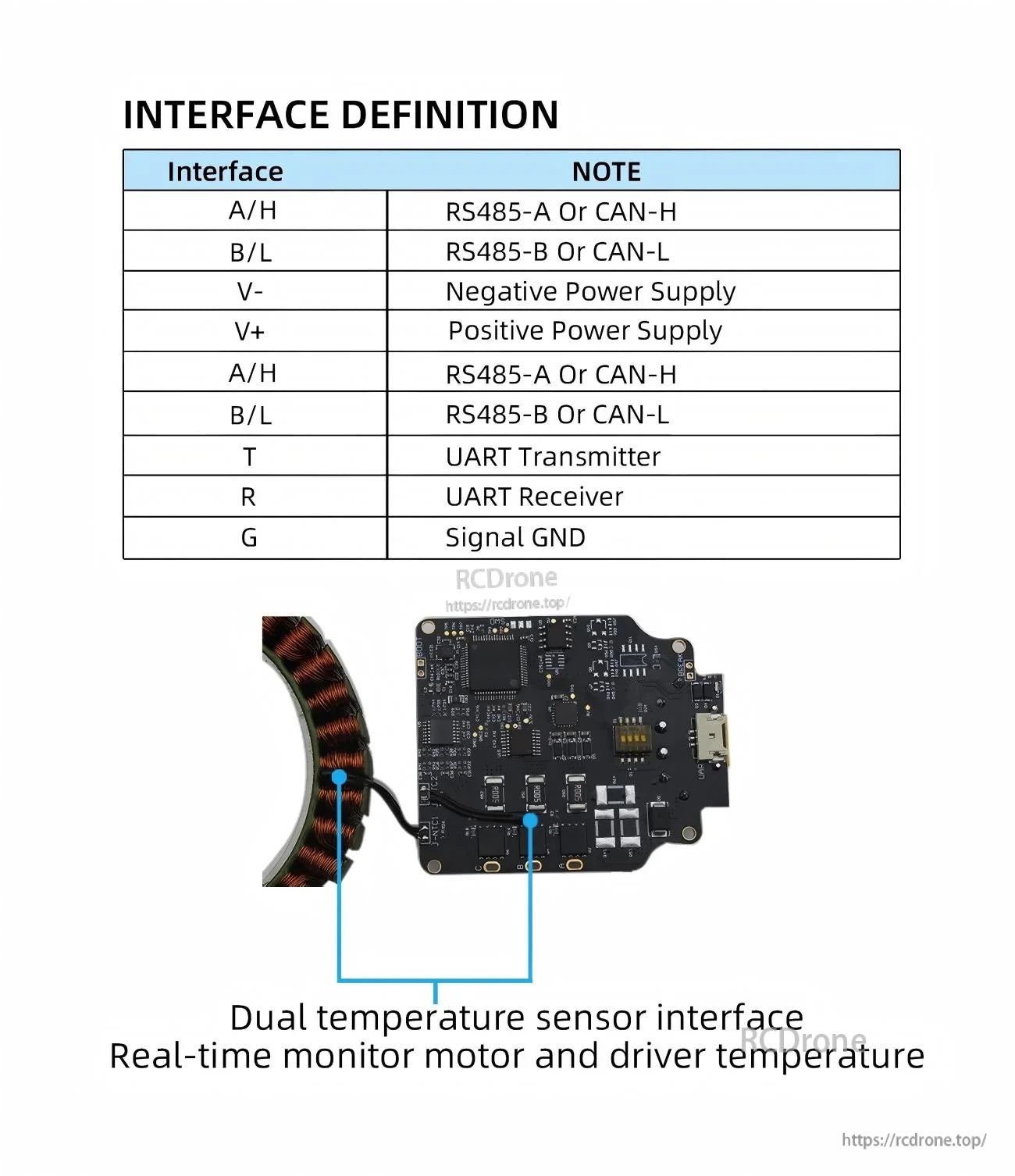
Definisi pin memudahkan untuk menyambungkan kuasa dan memilih komunikasi RS485/CAN semasa integrasi.

Pengurang planet 1:10 dioptimumkan untuk output tork kompak dalam ruang penggerak yang ketat.
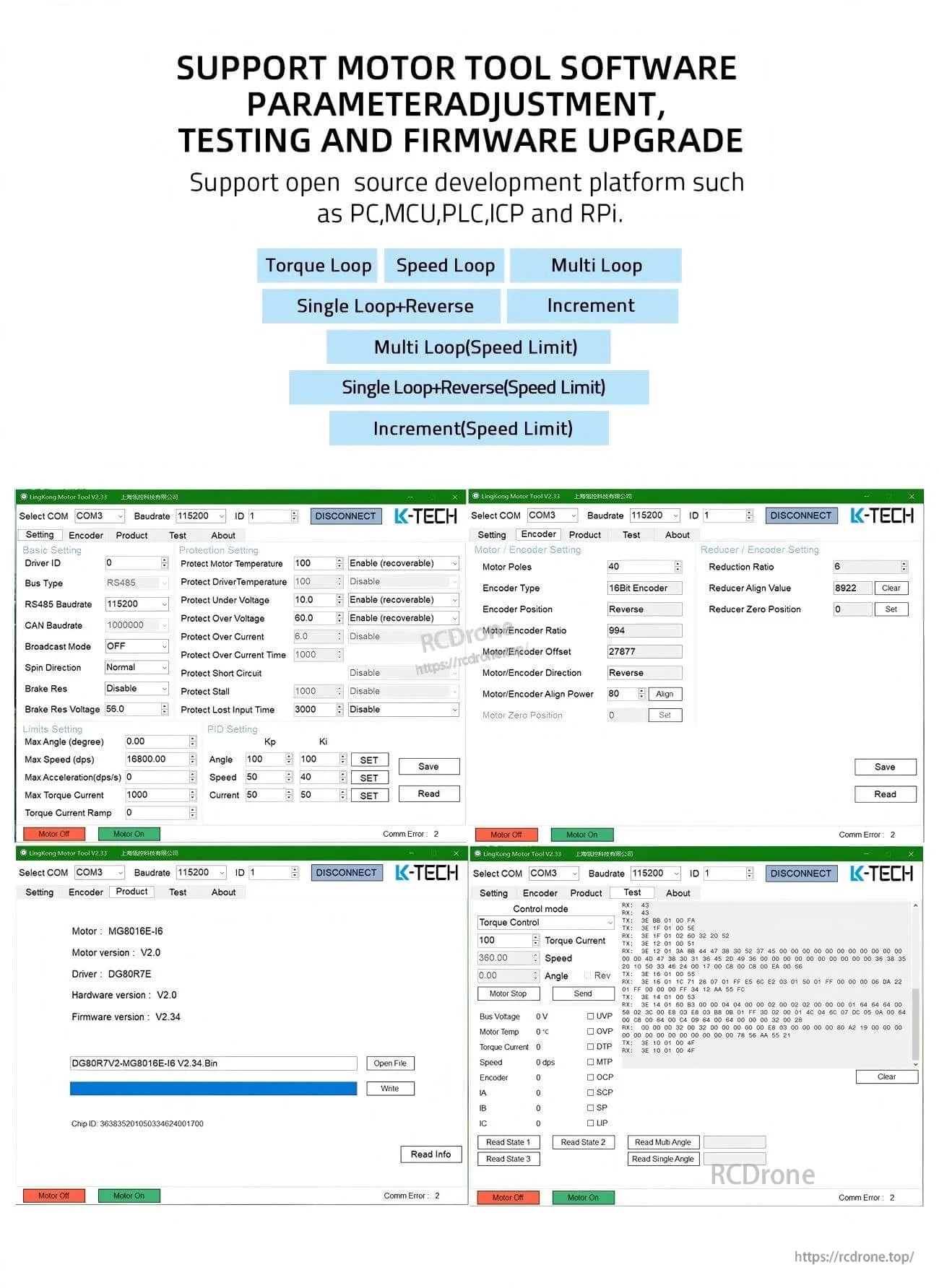
Perisian alat PC menyokong penyetelan parameter, ujian fungsi, dan peningkatan firmware semasa pengkomisionan.
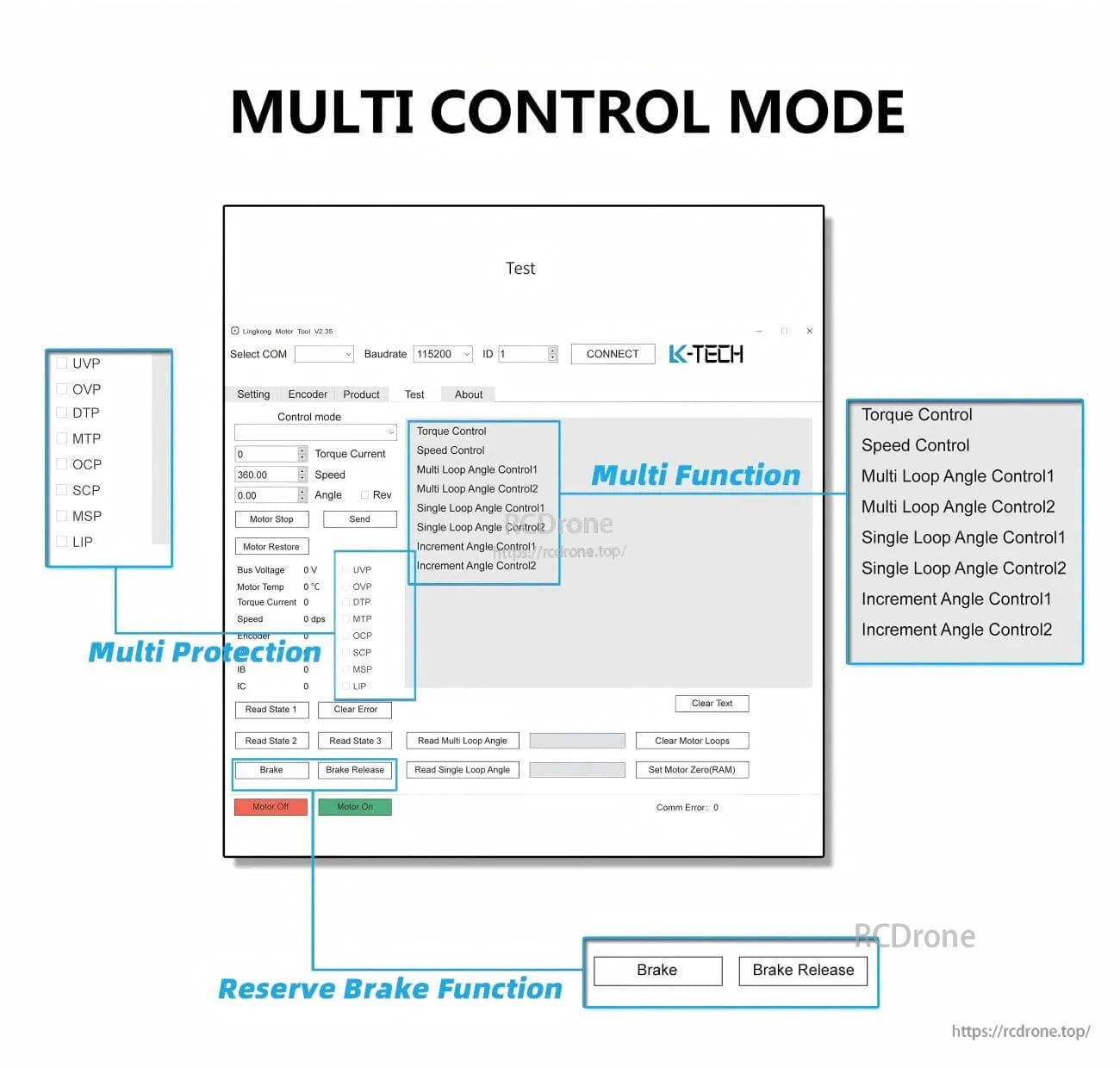
Pelbagai mod kawalan dan pilihan perlindungan menyokong aliran kerja tork, kelajuan, dan kedudukan.
Sesuai untuk AGV, lengan robot, quadruped, dan sendi robot boleh pakai di mana pemindahan gear dan maklum balas yang tepat diperlukan.
Related Collections




