




LKMTECH MG4010E-i36-V3 Motor Gear Planetari 24V 1:36 RS485/CAN Pengekod Magnetik untuk Robotik
LKMTECH MG4010E-i36-V3 Motor Gear Planetari 24V 1:36 RS485/CAN Pengekod Magnetik untuk Robotik
LKMTECH
Tidak dapat memuatkan ketersediaan pengambilan
Overview
Motor LKMTECH MG4010E-i36-V3 adalah motor gear planet yang direka untuk robotik dan penggerak kawalan gerakan. Ia menggabungkan motor tanpa berus, pengurang planet, dan pengod, dengan pilihan komunikasi yang disenaraikan sebagai RS485 atau CAN.
Ciri Utama
- Motor gear planet (MG4010E-i36, V3).
- Perbandingan gear: 1:36 (juga ditunjukkan sebagai “Perbandingan gear 1:36”).
- Belakang gear: 7 arcmin (label imej) / 12 arcmin (jadual spesifikasi).
- Pengod: 18bit pengod magnetik mutlak satu putaran (teks imej); juga disenaraikan sebagai 18bit (motor) + 14bit (pengurang) pengod magnetik (jadual spesifikasi).
- Komunikasi: RS485 atau CAN.
- Pemandu/driver FOC dirujuk (teks imej: “Pemandu FOC berprestasi tinggi”).
- Brek terbina dalam (teks imej/label UI).
- Parameter hos/uji/kemas kini firmware disokong (teks imej).
Spesifikasi
| Nama Item | MG4010E-i36-V3 |
| Voltan Dinilai | 24V |
| Kelajuan Maksimum | 90RPM |
| Kelajuan Dinilai | 77RPM |
| Arus Dinilai | 2.4A |
| Kuasa Maksimum | 132W |
| Tork Dinilai | 6 N.m (jadual spesifikasi) / 9 N.m (label imej) |
| Tork Maksimum | 13 N.m (jadual spesifikasi) / 18 N.m (label imej) |
| Pemalar Kelajuan | 3 rpm/V |
| Pemalar Tork | 2.58 N.m/A |
| Putaran | 14 |
| Jenis Penggulungan | Y |
| Rintangan Fasa | 0.68 Ω |
| Induktans Fasa | 0.25 mH |
| Poles Motor | 28 |
| Inersia rotor | 158 gcm² |
| Suatu Suhu Motor | YA |
| Jenis Pengurang | PG5336 |
| Nisbah Pengurangan | 1:36 |
| Backlash | ≤12 arcmin (jadual spesifikasi) / 6 arcmin (label imej) |
| Beban Terperingkat Galas | 1120 N |
| Berat Motor | 378 g |
| Cadangan Pemanduan | DG40E |
| Voltan Input Pemanduan | 12-24V (jadual spesifikasi) / 12-60V (label imej) |
| Komunikasi | RS485 ATAU CAN |
| Frekuesi Komunikasi | RS485: 500 Hz (115200 bps) / CAN: 2 KHz (1 Mbps) |
| Pengodok | 18bit (motor) + 14bit (reducer) Pengodam Magnet |
| Kelajuan Baud Pengodam (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2 Mbps |
| Kelajuan Baud (CAN) | 100K, 125K, 250K, 500K, 1M |
| Mod Kawalan | Gelung Tork (24 KHz) / Gelung Kelajuan (8 KHz) / Gelung Kedudukan (4 KHz) |
| Lengkung Pecutan | Pecutan Trapeziod |
| Saiz Motor | Φ 53*54.5 (label imej) |
Definisi Antara Muka
- suis ID (label imej: “SUIS ID”).
| Port | Arahan |
|---|---|
| A/H | RS485-A atau CAN-H |
| B/L | RS485-B atau CAN-L |
| V- | Bekalan Kuasa Negatif |
| V+ | Bekalan Kuasa Positif |
| T | Pemancar UART |
| R | Penerima UART |
| G | GND Isyarat |
Senario Aplikasi
- Robot Humanoid
- Robot Lengan
- Exoskeleton
- Robot Quadruped
- Kereta AGV / Kereta AGV
- Robot ARU
- Anjing Mecha
- Robot perkhidmatan
- Lidar genggam
- Robot latihan pemulihan
- Robot pemeriksaan
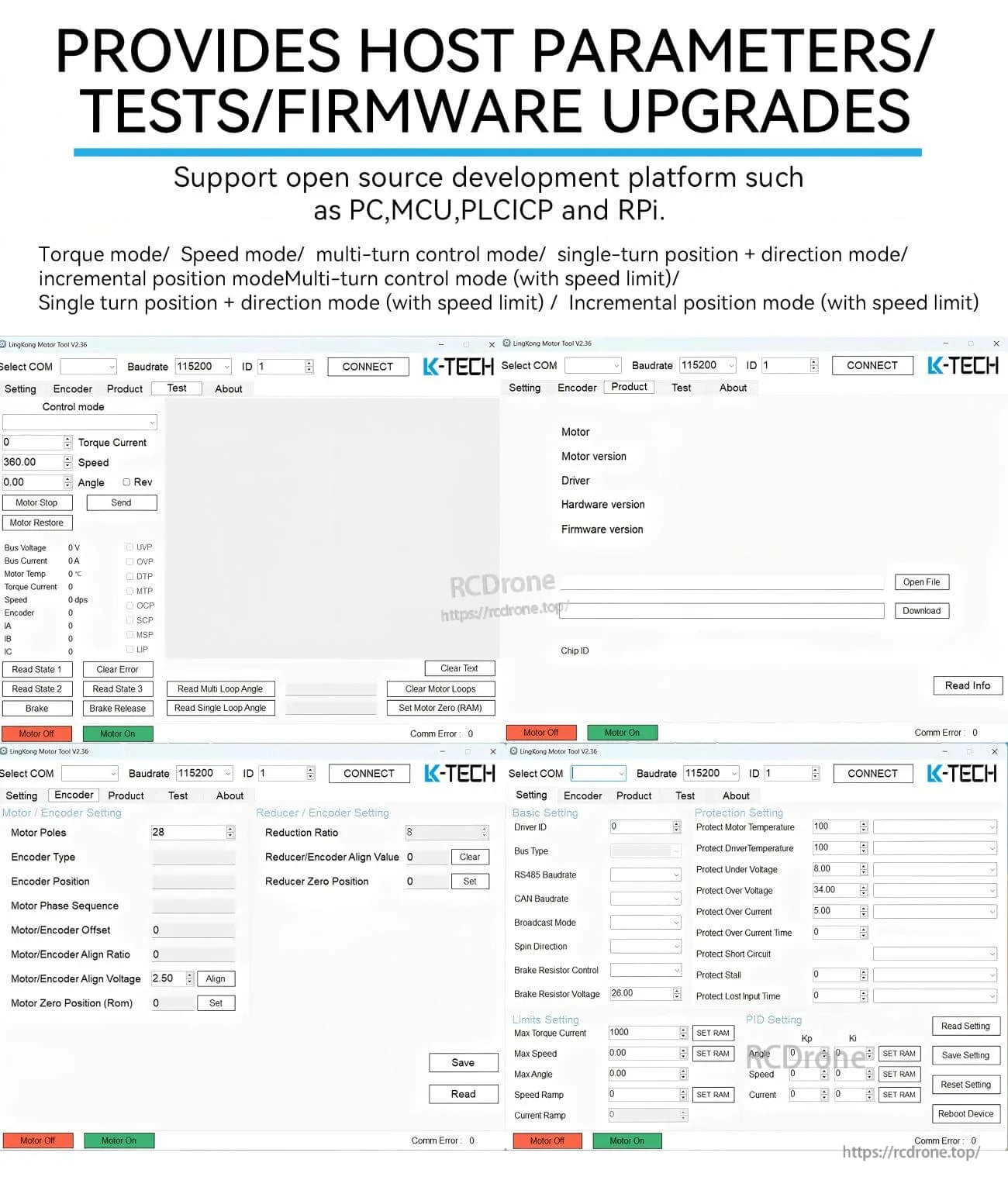
Nota Perisian & Kawalan
- Menyokong platform pembangunan sumber terbuka seperti PC, MCU, PLC, ICP, dan RPi.
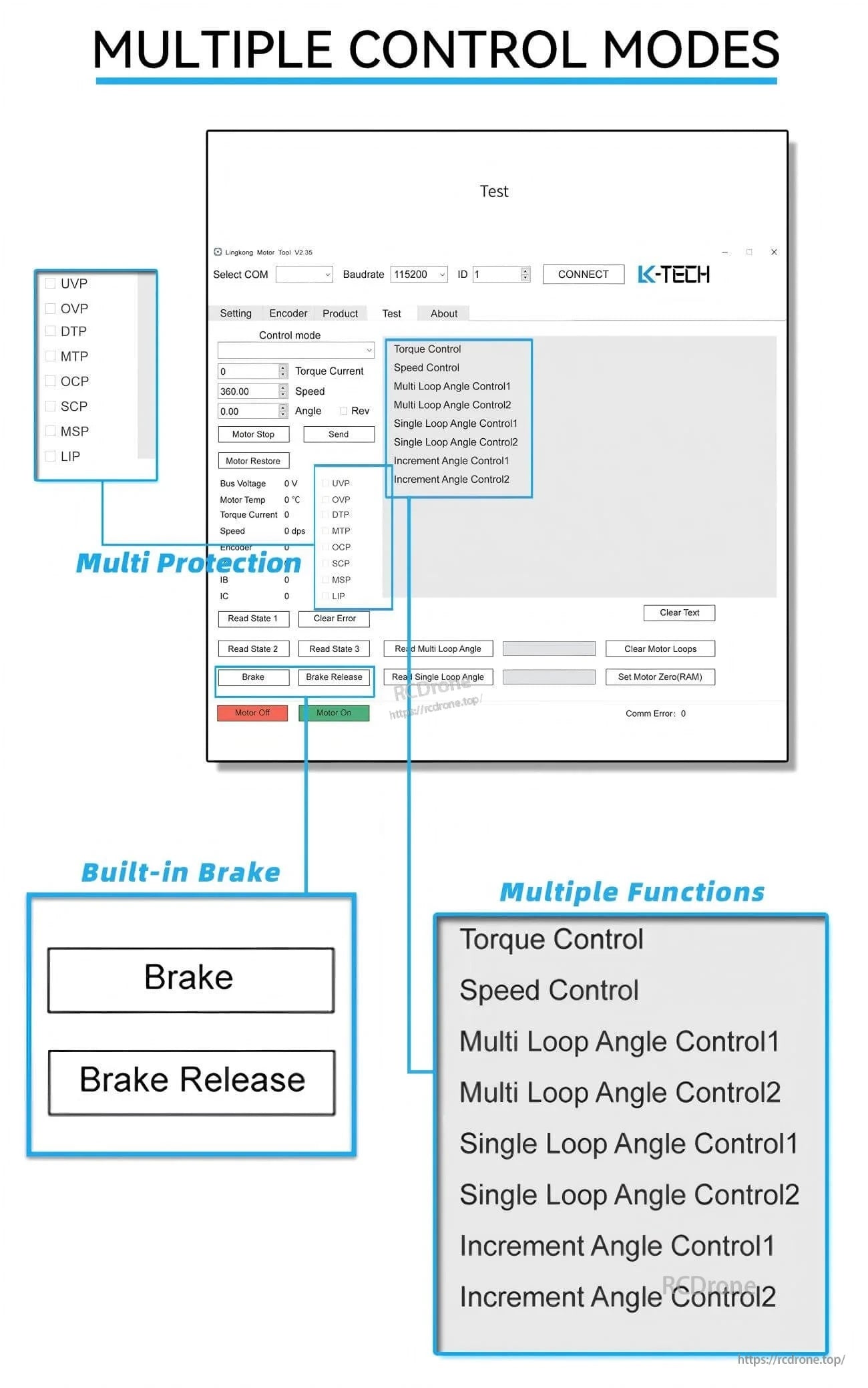
- Mod yang disenaraikan (teks imej): Mod Tork, Mod Kelajuan, mod kawalan pelbagai pusingan, mod kedudukan + arah satu pusingan, mod kedudukan increment; versi dengan had kelajuan juga ditunjukkan.
- Pelbagai mod kawalan ditunjukkan dalam UI: Kawalan Tork, Kawalan Kelajuan, Kawalan Sudut Gelung Pelbagai1, Kawalan Sudut Gelung Pelbagai2, Kawalan Sudut Gelung Tunggal1, Kawalan Sudut Gelung Tunggal2, Kawalan Sudut Increment1, Kawalan Sudut Increment2.
- Label perlindungan pelbagai ditunjukkan: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP.
- Kawalan brek terbina dalam ditunjukkan: Brek, Lepaskan Brek.
Untuk pemeriksaan keserasian pra-jualan (integrasi RS485/CAN, pemilihan kadar baud) atau bantuan akses fail, hubungi [email protected] or lawati https://rcdrone.top/.
Manual / Dokumen
Butiran

MG4010E-i36-V3 menggabungkan motor tanpa berus, pengurang planet, dan pengod untuk penggerak robotik kompak.
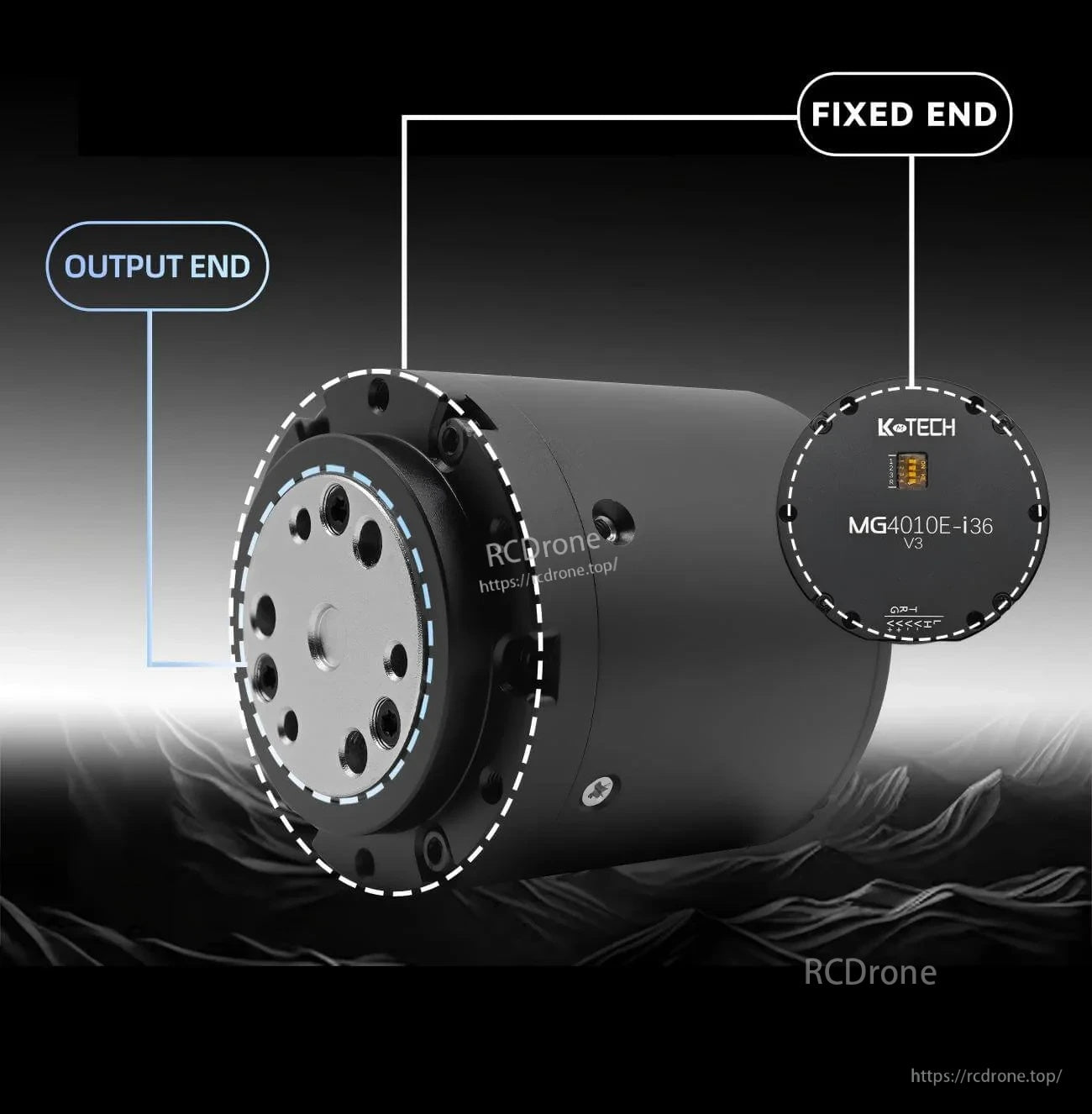
Akhir output gaya flang dan susun atur akhir tetap memudahkan integrasi dalam lengan, kaki, dan modul sendi lain.

Komunikasi RS485 atau CAN dipasangkan dengan pemacu FOC dan maklum balas pengod magnet mutlak untuk kawalan tork, kelajuan, dan kedudukan yang stabil.
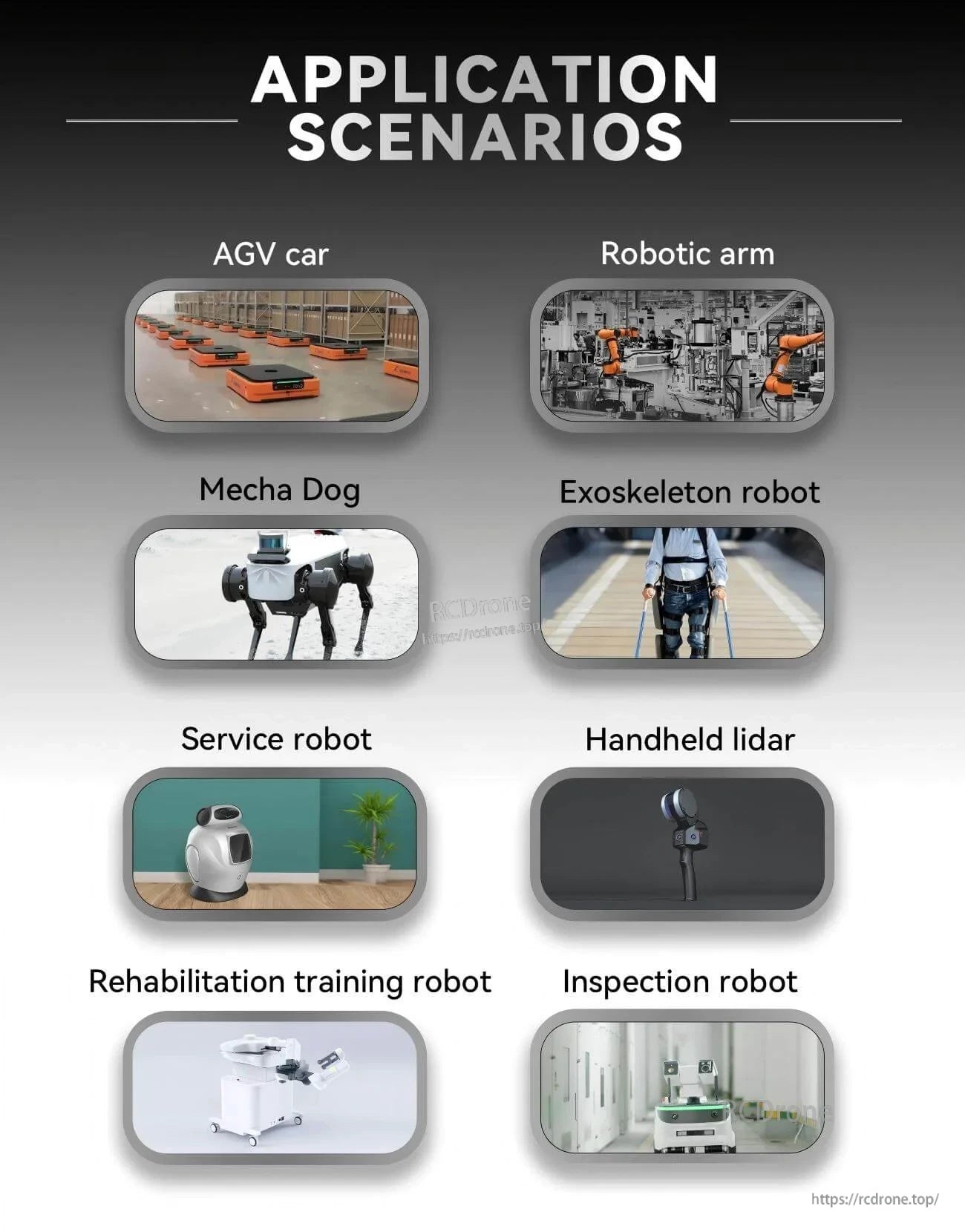
Kes penggunaan biasa termasuk AGV, lengan robotik, platform quadruped, exoskeleton, dan robot pemeriksaan atau perkhidmatan.
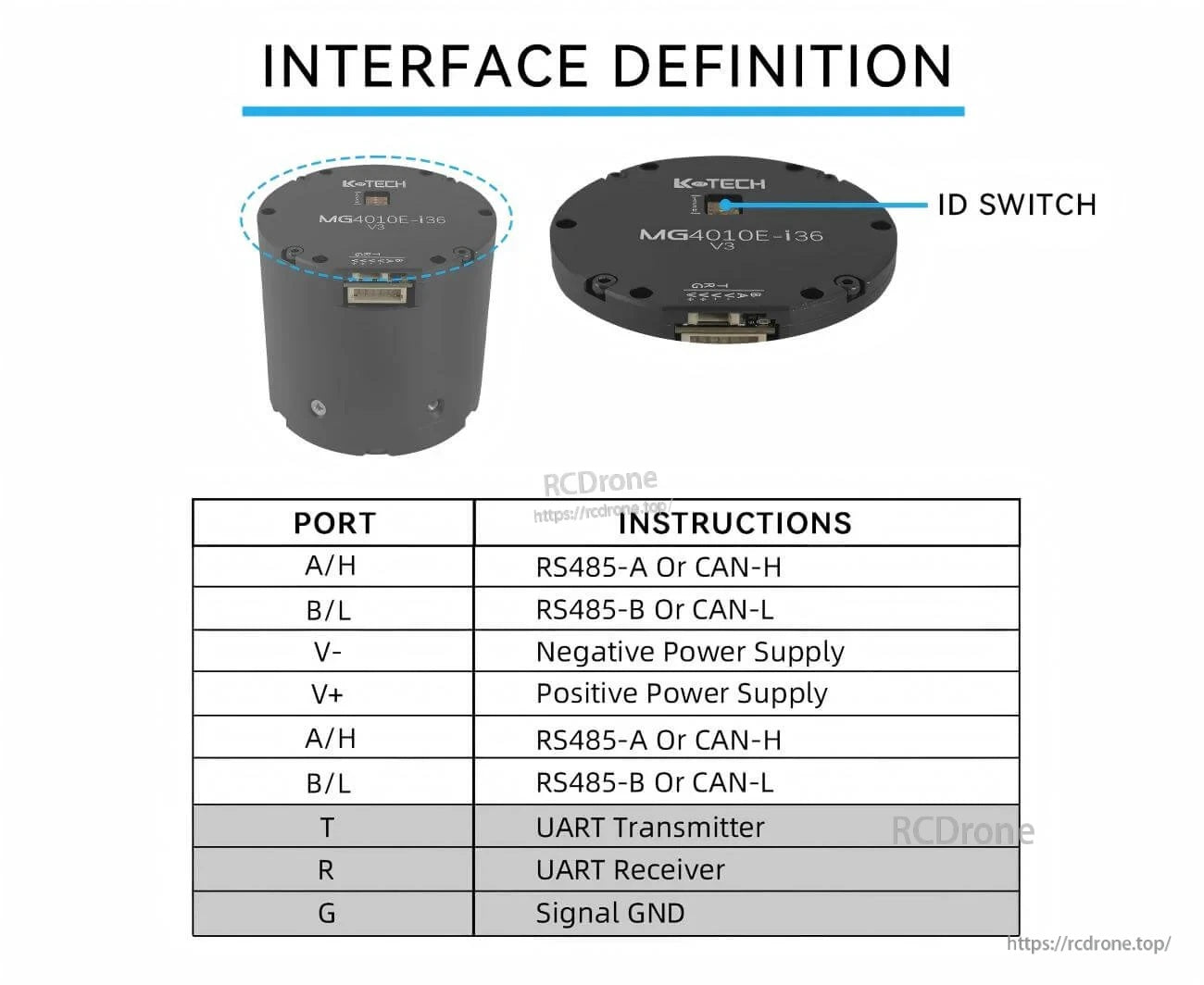
Penyambungan dipermudahkan dengan pin bas RS485/CAN yang dilabel, sambungan kuasa, UART Tx/Rx, tanah isyarat, dan suis ID di atas papan.
Pengawal brek terbina dalam dan pelbagai mod operasi membantu menyesuaikan tingkah laku untuk pelbagai tugas kawalan gerakan dan keperluan keselamatan.
Related Collections




