




Motor LKMTECH MG4010E-i36B-V3 24V 1:36 Motor Gear Planetari dengan Brek, RS485/CAN, Pengekod Magnetik
Motor LKMTECH MG4010E-i36B-V3 24V 1:36 Motor Gear Planetari dengan Brek, RS485/CAN, Pengekod Magnetik
LKMTECH
Tidak dapat memuatkan ketersediaan pengambilan
Overview
Motor LKMTECH MG4010E-i36B-V3 adalah motor gear planet dengan brek terintegrasi dan maklum balas pengod, direka untuk penggerakan robotik di mana kawalan tork/kelajuan/posisi yang tepat dan integrasi yang padat diperlukan. Ia menyokong komunikasi RS485 atau CAN dan ditentukan dengan pengurang PG4210 (1:36) dan pengod magnetik dwi (motor 18-bit + pengurang 14-bit).
Ciri Utama
- Pengurang planet: PG4210, nisbah pengurangan 1:36, backlash ≤12 arcmin
- Pengod: 18-bit (motor) + 14-bit (pengurang) pengod magnetik
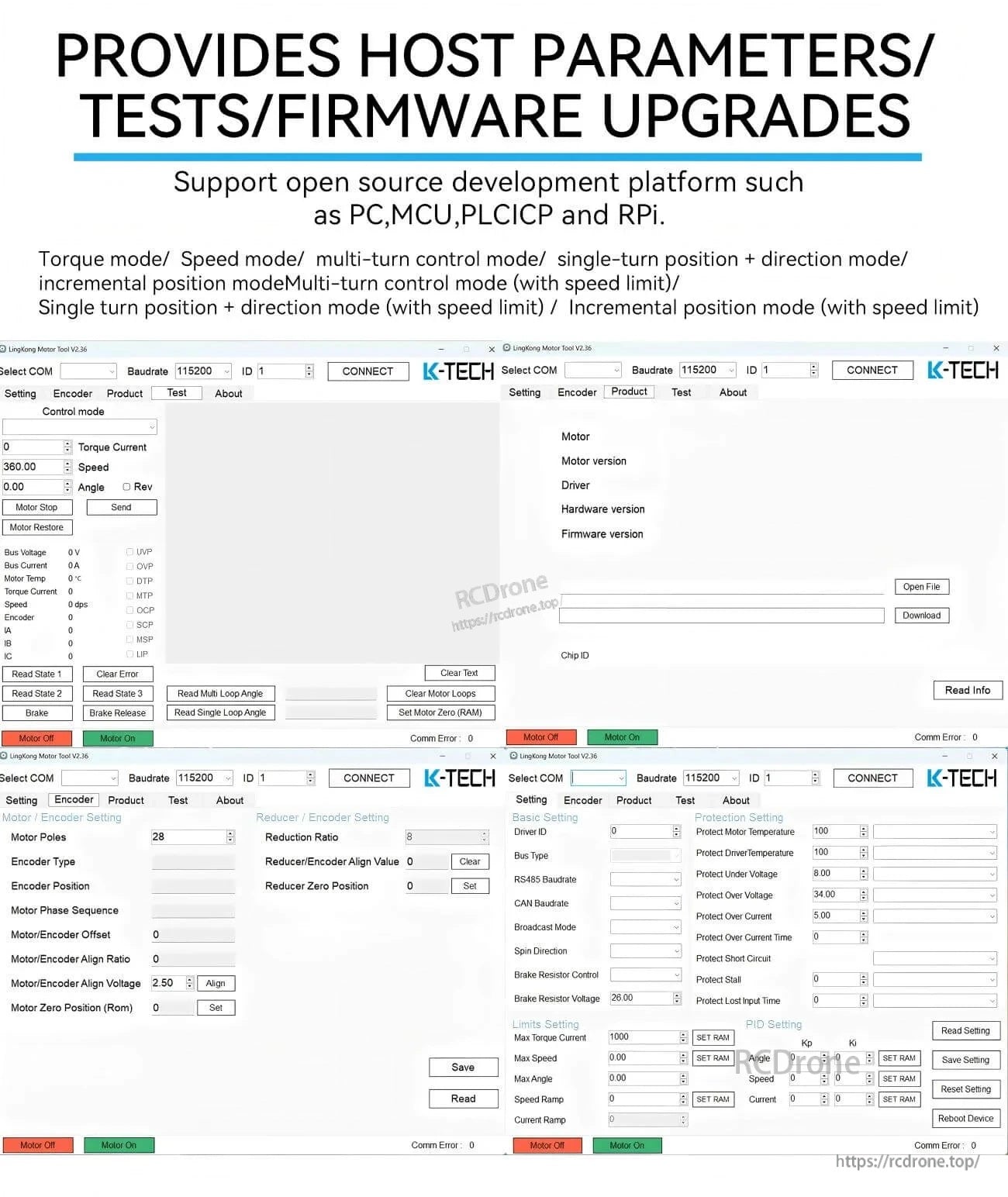
- Komunikasi: RS485 atau CAN
- Gelung kawalan: Gelung Tork (32KHz) / Gelung Kelajuan (8KHz) / Gelung Posisi (4KHz)
- Lengkung pecutan: Pecutan trapezoid
- Brek: BG4906, tork brek 0.6N.m
- Suasana motor: YA
Spesifikasi Teknikal
| Nama Item | MG4010E-i36B-V3 |
| Voltan Dinilai | 24V |
| Kelajuan Maksimum | 90RPM |
| Kelajuan Dinilai | 77RPM |
| Tork Dinilai | 6N.m |
| Tork Maksimum | 13N.m |
| Arus Dinilai | 2.4A |
| Kuasa Maksimum | 132W |
| Pemalar Kelajuan | 3rpm/V |
| Pemalar Tork | 2.58N.m/A |
| Putaran | 14 |
| Jenis Penggulungan | Y |
| Rintangan Fasa | 0.68Ω |
| Induktans Fasa | 0.25mH |
| Tiang Motor | 28 |
| Inersia Rotor | 158gcm² |
| Suasana Motor | YA |
| Jenis Pengurang | PG4210 |
| Nisbah Pengurangan | 1:36 |
| Backlash | ≤12 arcmin |
| Beban Terperingkat Galas | 1120N |
| Berat Motor | 542.5g |
| Jenis Brek | BG4906 |
| Tork Brek (N.m) | 0.6N.m |
| Voltan Permulaan (V) | 24V |
| Voltan Penyelenggaraan (V) | 7V |
| Kuasa Penyelenggaraan (W) | 1.4W |
| Cadangan Pemanduan | DG40E |
| Voltan Input Pemanduan | 7.4-32V |
| Komunikasi | RS485 ATAU CAN |
| Frekuesi Komunikasi | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Pengodam | 18bit(motor)+14bit(pengurang) Pengodam Magnetik |
| Kelajuan Baud Pengodam (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Kelajuan Baud (CAN) | 100K, 125K, 250K, 500K, 1M |
| Mod Kawalan | Gelung Tork(32KHz)/Gelung Kelajuan(8KHz)/Gelung Kedudukan(4KHz) |
| Lengkung Pecutan | Pecutan Trapeziod |
Definisi Antara Muka (Port)
Makna port ditunjukkan untuk siri motor ini:
- A/H: RS485-A atau CAN-H
- B/L: RS485-B atau CAN-L
- V-: Bekalan Kuasa Negatif
- V+: Bekalan Kuasa Positif
- T: Pemancar UART
- R: Penerima UART
- G: GND Isyarat
- Switch ID
Aplikasi
- Robot humanoid
- Tangan robot
- Exoskeleton
- Robot quadruped
- Kenderaan AGV
- Robot ARU
Manual / Dokumen
Untuk sokongan integrasi dan pemeriksaan keserasian pra-jualan, hubungi [email protected] or lawati https://rcdrone.top/.
Butiran

Badan gearmotor planetari kompak mengintegrasikan brek dan antara muka onboard dalam satu penggerak pakej.
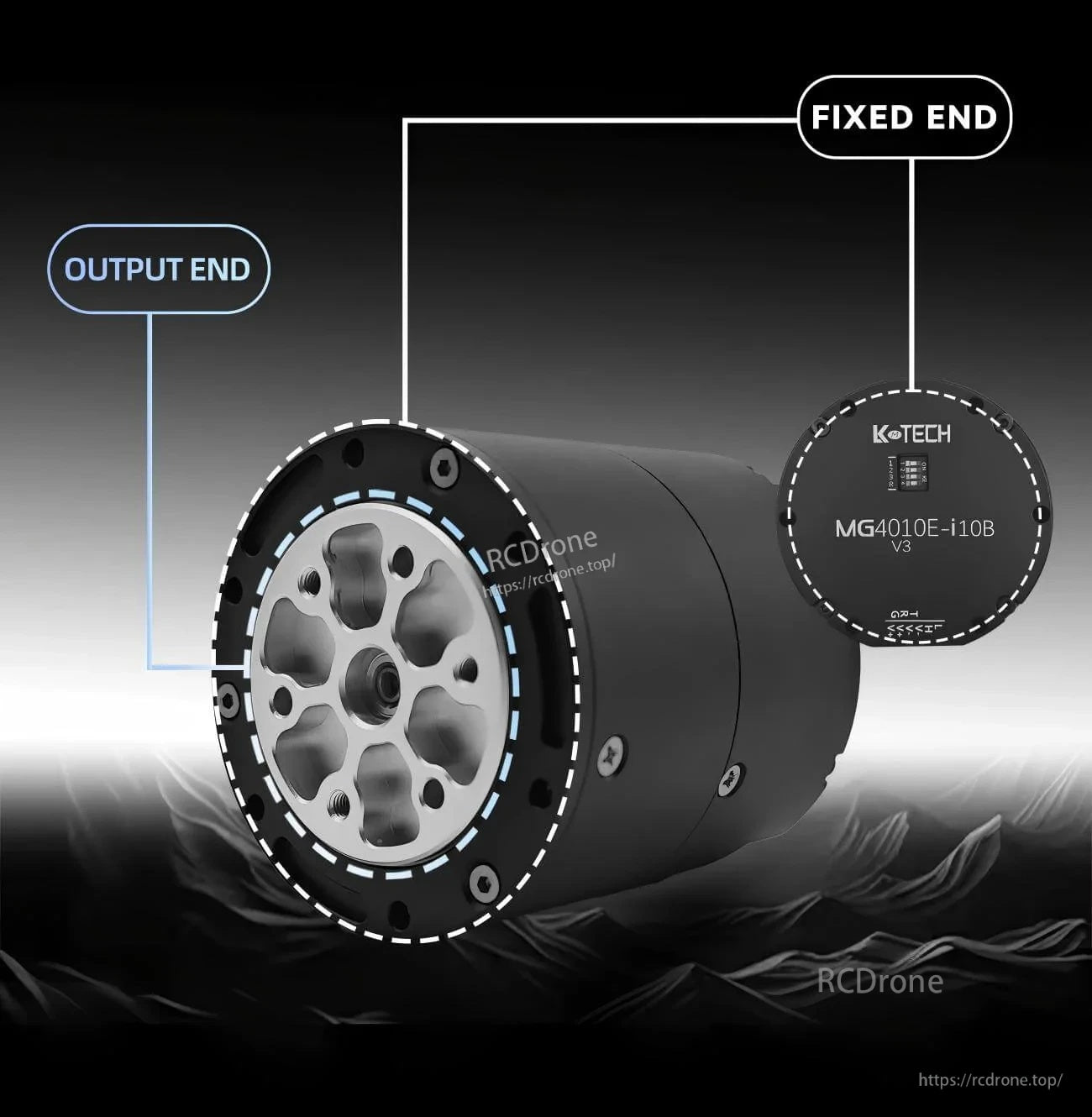
Hujung output yang jelas ditakrifkan dan hujung tetap membantu memudahkan integrasi mekanikal dan penjajaran dalam pemasangan.

Maklum balas pengod dan komunikasi bas menyokong tork, kelajuan, dan kawalan kedudukan yang stabil untuk sendi robotik.
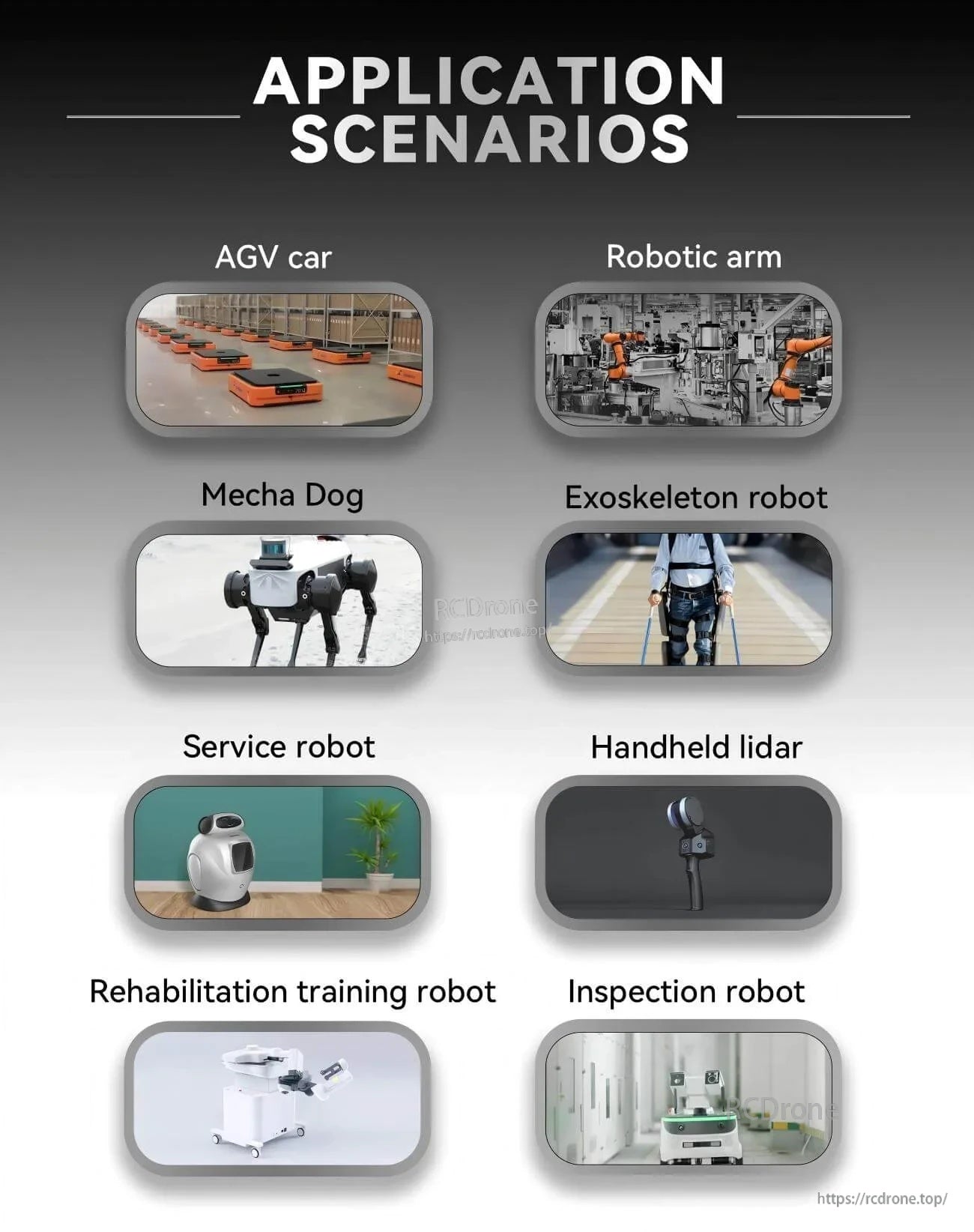
Direka untuk tugas penggerakan robot dari AGV dan lengan robotik kepada robot berkaki dan sistem exoskeleton.
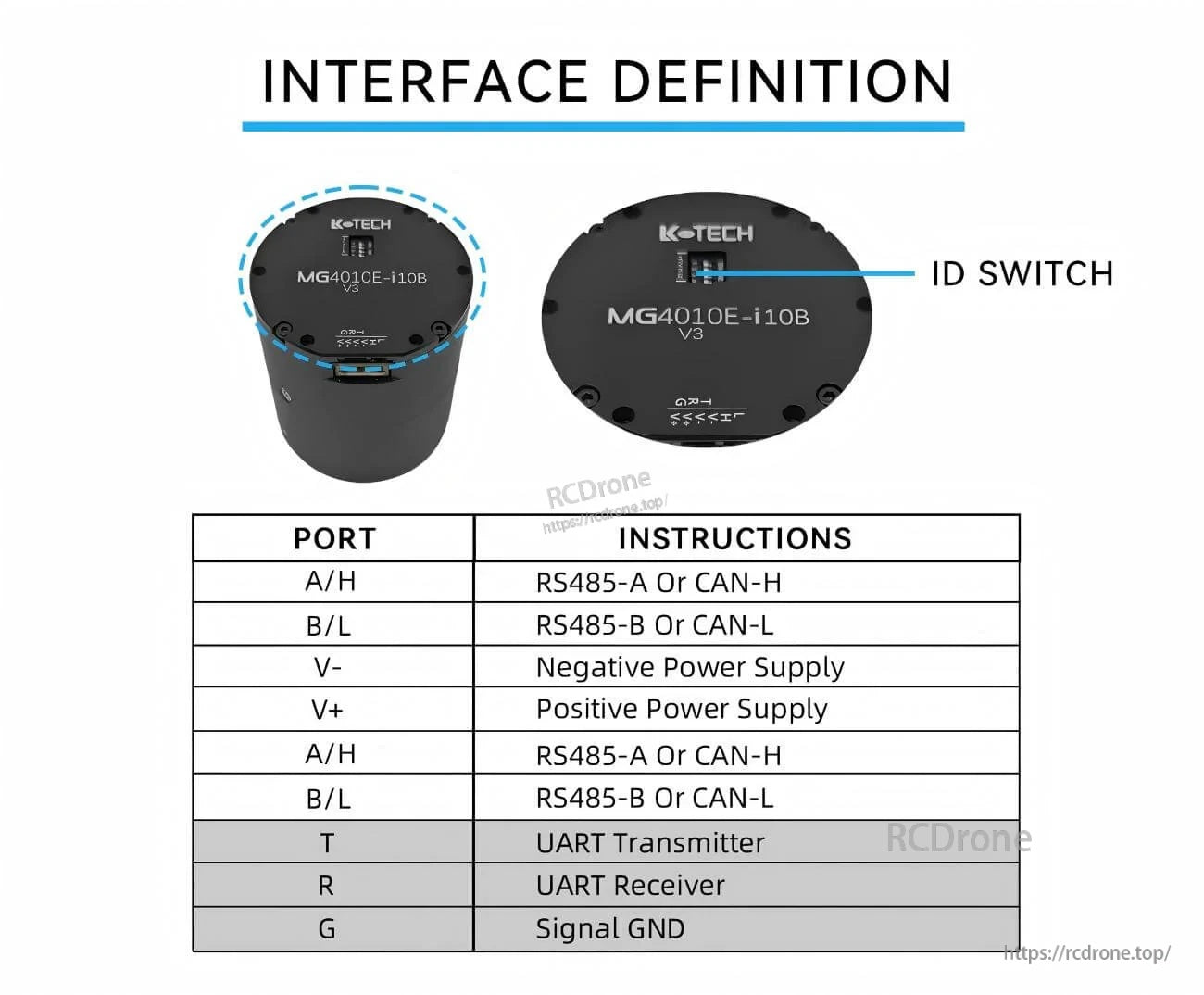
Definisi port merangkumi kuasa, pendawaian RS485/CAN, dan pin UART, dengan suis ID onboard untuk penetapan alamat.

Related Collections




