




LKMTECH MG8008E-i9-V3 Motor 24V/48V Motor Tanpa Berus dengan Gear & Pengekod, RS485/CAN, Pengurang 1:9
LKMTECH MG8008E-i9-V3 Motor 24V/48V Motor Tanpa Berus dengan Gear & Pengekod, RS485/CAN, Pengurang 1:9
LKMTECH
Tidak dapat memuatkan ketersediaan pengambilan
Tinjauan
Motor LKMTECH MG8008E-i9-V3 adalah motor tanpa berus berkuasa tinggi dengan pengurang planet berketepatan tinggi dan pemacu FOC untuk penggerak robotik. Ia direka untuk tork output yang besar dan ketepatan tinggi, serta menyokong maklum balas kedudukan mutlak melalui pengod encoders magnet.
Ciri Utama
- Motor tanpa berus berkuasa tinggi
- Pengurang planet presisi tinggi
- Pemandu FOC berprestasi tinggi
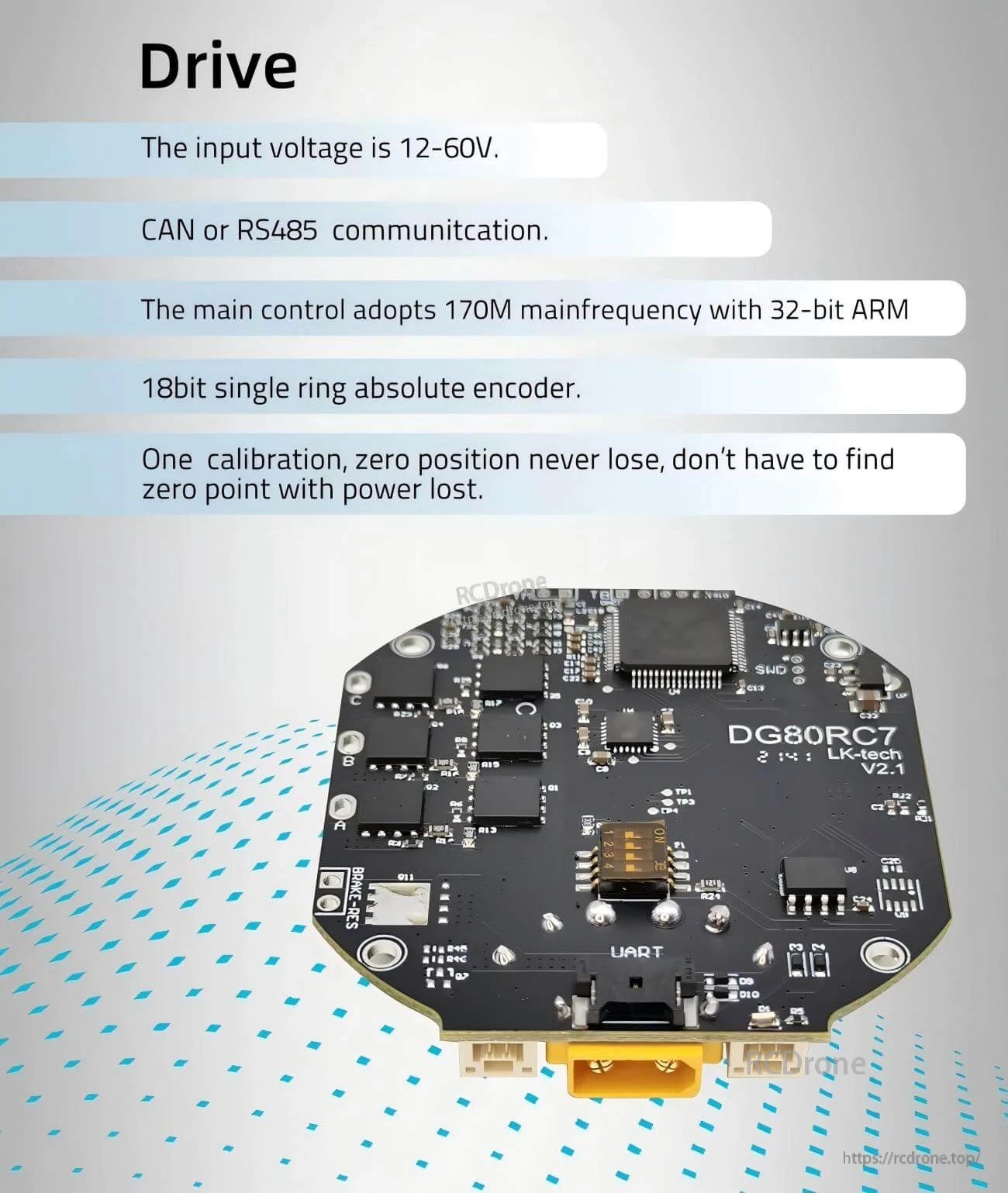
- Voltan input pemandu: 12-60V
- Komunikasi CAN atau RS485
- Pengawal utama menggunakan frekuensi utama 170M dengan ARM 32-bit
- Pengod kod mutlak satu cincin 18bit
- Satu kalibrasi; kedudukan sifar tidak pernah hilang; tidak perlu mencari titik sifar apabila kuasa hilang
- Konfigurasi pengod kod: 18 bit (Motor) & 14 bit (Pengurang) pengod kod magnetik
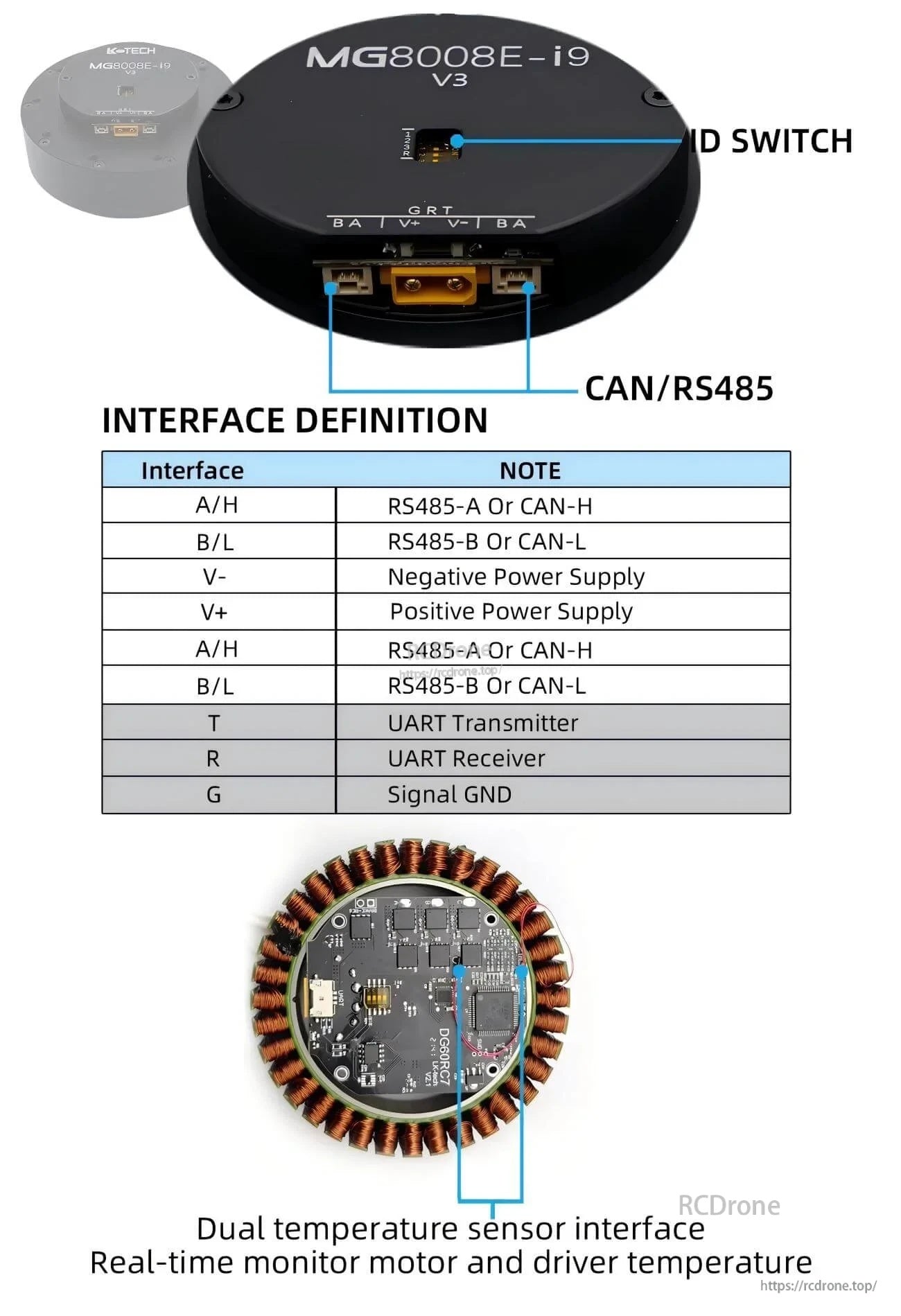
- Antara muka sensor suhu dwi; pemantauan suhu motor dan pemandu secara masa nyata
- Menyokong perisian alat motor untuk pelarasan parameter, ujian, dan peningkatan firmware
- Menyokong platform pembangunan sumber terbuka seperti PC, MCU, PLC, ICP, dan RPi
Aplikasi
- Robot humanoid
- Tangan robot
- Exoskeleton / robot boleh pakai
- Robot berkaki empat / anjing robot
- Kenderaan AGV / kereta AGV
- Robot ARU
Spesifikasi
| Parameter | Versi 24V | Versi 48V |
|---|---|---|
| Nama Item | MG8008E-i9-V3 | MG8008E-i9-V3 |
| Voltan Dinilai | 24V | 48V |
| Kelajuan Maksimum | 112RPM | 220RPM |
| Tork Dinilai | 9 N.m | 10 N.m |
| Kelajuan Dinilai | 78RPM | 178RPM |
| Arus Dinilai | 4.6A | 4.9A |
| Kuasa Maksimum | 96W | 330W |
| Tork Maksimum | 20 N.m | 20 N.m |
| Kelajuan tetap | 42 rpm/V | 41.4 rpm/V |
| Tork Tetap | 0.22 N.m/A | 0.23 N.m/A |
| Pusingan | 17 | 17 |
| Jenis Penggulungan | Y | Y |
| Rintangan Fasa | 0.74 Ω | 0.74 Ω |
| Induktans Fasa | 0.59 mH | 0.59 mH |
| Tiang Motor | 40 | 40 |
| Inersia Rotor | 1550 | 1550 |
| Suasana Suhu Motor | YA | YA |
| Jenis Pengurang | PG5509 | PG5509 |
| Nisbah Pengurangan | 1:9 | 1:9 |
| Backlash | ≤6 arcmin | ≤6 arcmin |
| Beban Terperingkat Galas | 1120 N | 1120 N |
| Berat Motor | 570 g | 570 g |
| Cadangan Pemanduan | DG60E | DG60E |
| Voltan Input Pemanduan | 12-60V | 12-60V |
| Komunikasi | RS485 atau CAN | RS485 atau CAN |
| Frekuensi Komunikasi | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Pengodam | 18 bit (Motor) & 14 bit (Reducer) pengodam magnet | 18 bit (Motor) & 14 bit (Reducer) pengodam magnet |
| Kelajuan Baud Pengodam (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Kelajuan Baud (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Mod Kawalan | Gelung Tork (32KHz) / Gelung Kelajuan (8KHz) / Gelung Kedudukan (4KHz) | Gelung Tork (32KHz) / Gelung Kelajuan (8KHz) / Gelung Kedudukan (4KHz) |
| Lengkung Pecutan | Pecutan Trapeziod | Pecutan Trapeziod |
Definisi Antara Muka
| Antara Muka | Nota |
|---|---|
| A/H | RS485-A atau CAN-H |
| B/L | RS485-B atau CAN-L |
| V- | Bekalan kuasa negatif |
| V+ | Bekalan kuasa positif |
| T | Pemancar UART |
| R | Penerima UART |
| G | GND Isyarat |
Untuk pemilihan produk dan sokongan integrasi, hubungi [email protected] or lawati https://rcdrone.top/.
Dokumen
Butiran

Sebuah penggerak terintegrasi kompak yang dibina untuk tork output tinggi dan kawalan gerakan tepat dalam sendi robotik.

MG8008E-i9-V3 menggabungkan motor, pengurang planet tepat tanpa berus, dan pemacu FOC dalam satu penyelesaian.
Komunikasi CAN atau RS485 dengan julat input 12–60V yang luas membantu memudahkan integrasi di seluruh platform kawalan.

Maklum balas pengodok magnetik mutlak menyokong penentuan kedudukan yang boleh diulang tanpa perlu menetapkan semula selepas kehilangan kuasa.
Pematerian antara muka yang jelas ditambah sokongan sensor suhu dwi membolehkan pendawaian yang boleh dipercayai dan pemantauan terma masa nyata.
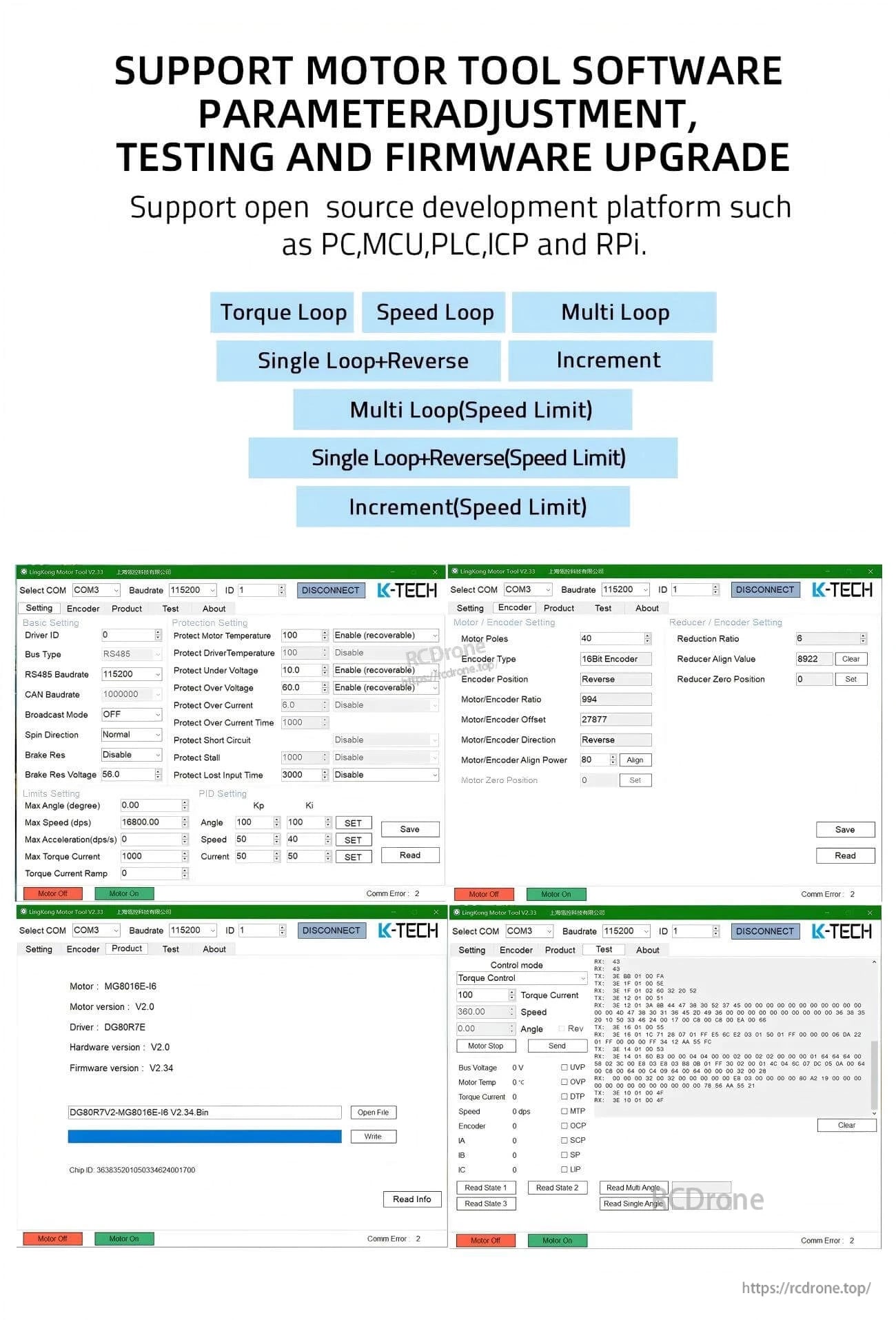
Perisian alat berasaskan PC menyokong penyetelan, pengujian, dan kemas kini firmware semasa pembangunan dan pelaksanaan.
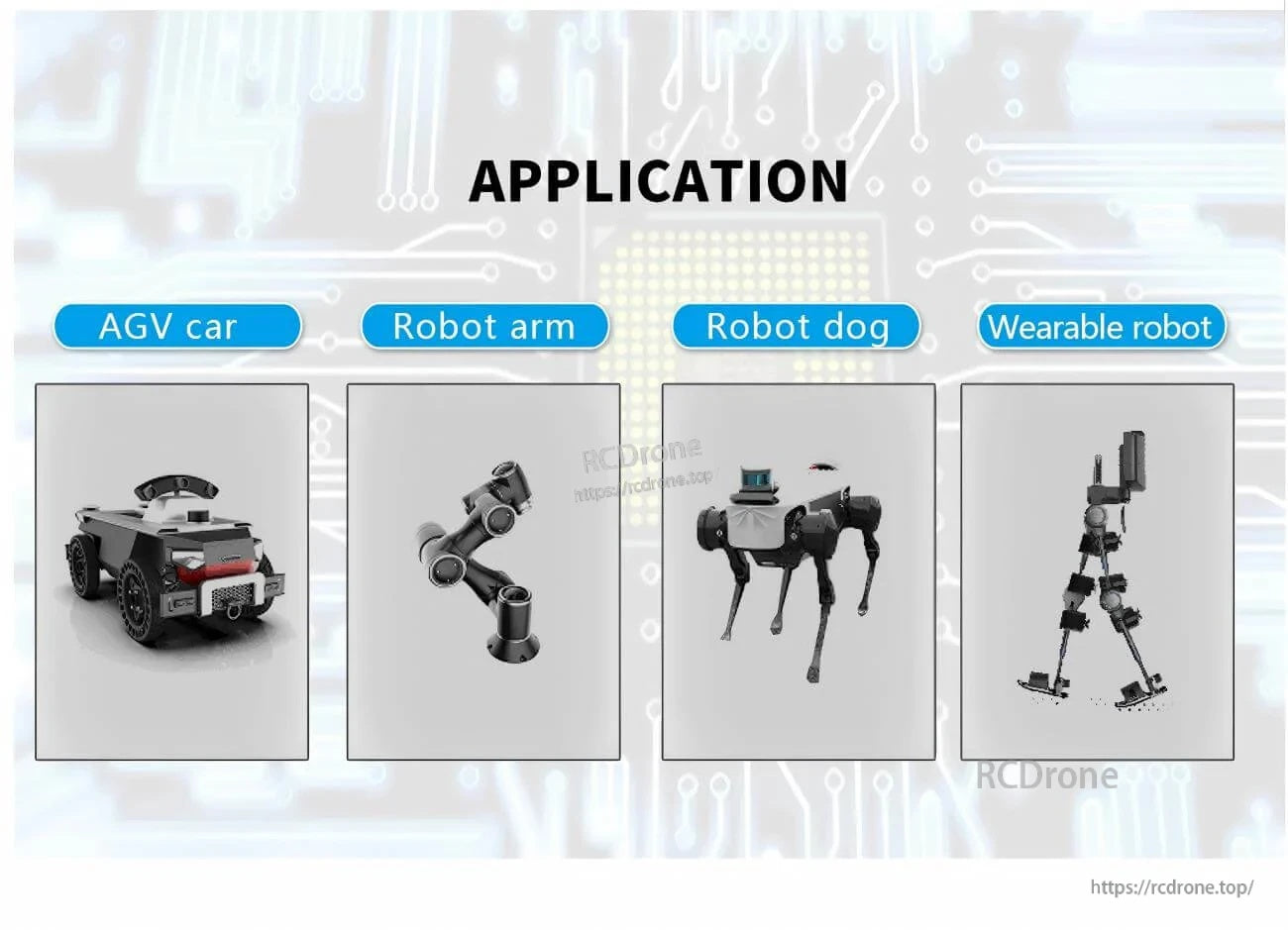
Ideal untuk projek penggerak robotik seperti AGV, lengan robot, quadruped, dan robotik boleh pakai.
Related Collections




