




LKMTECH MHF6015-V3 Motor 24V 872RPM 3N.m 19bit Pengekod Magnetik RS485/CAN untuk Robotik
LKMTECH MHF6015-V3 Motor 24V 872RPM 3N.m 19bit Pengekod Magnetik RS485/CAN untuk Robotik
LKMTECH
Tidak dapat memuatkan ketersediaan pengambilan
Tinjauan
Motor LKMTECH MHF6015-V3 adalah motor tanpa berus 24V dengan pengodak magnet 19bit dan komunikasi RS485 atau CAN, direka untuk aplikasi gerakan robotik seperti robot humanoid, lengan robot, exoskeleton, dan kenderaan AGV.
Ciri Utama
- Reka bentuk terintegrasi: papan pemacu terbina dalam, MCU berprestasi tinggi, penyesuaian parameter hos, saiz kecil dan tork besar, pengodak nilai mutlak ketepatan tinggi.
- Reka bentuk berongga; saiz berongga ditandakan sebagai 12.7 mm (12.6 mm ditunjukkan di dalam panggilan berongga).
- Berkendara dengan lancar; pensijilan CE (seperti yang dinyatakan).
- Pernyataan bahan teras: “Bahan teras motor adalah lembaran keluli silikon berkualiti tinggi dan magnet kekal magnet kuat suhu tinggi.”
- Pernyataan rotor luar: “Reka bentuk rata pelbagai peringkat rotor luar memberikan tork yang lebih tinggi dan sesuai untuk aplikasi berkaitan ruang.”
- Pernyataan galas: “Struktur tanpa berus dengan galas berprestasi tinggi untuk putaran yang lebih lancar dan jangka hayat yang lebih lama.”
- Pernyataan pengambilan/ kawalan semasa: “Pengambilan rintangan aloi yang diputihkan dengan ketepatan tinggi dan suhu rendah, kawalan semasa yang tepat.”
- Pernyataan pemacu: “Pemacu jambatan penuh tiga fasa N-tube, rintangan dalaman rendah, arus tinggi.”
- Pernyataan kawalan: “Gelung tertutup tork, kelajuan, mod kawalan kedudukan boleh ditukar secara sewenang-wenangnya.”
- Pernyataan parameter/ujian/kemas kini firmware hos; menyokong platform pembangunan sumber terbuka seperti PC, MCU, PLC, ICP dan RPi.
- Pernyataan mod: Mod tork / Mod kelajuan / mod kawalan pelbagai pusingan / mod kedudukan + arah satu pusingan / mod kedudukan berincrement; mod kawalan pelbagai pusingan (dengan had kelajuan) / mod kedudukan + arah satu pusingan (dengan had kelajuan) / mod kedudukan berincrement (dengan had kelajuan).
Spesifikasi
| Nama Item | MHF6015-V3 |
| Putaran | 25 |
| Voltan Dinilai | 24V |
| Kelajuan Maksimum | 872RPM |
| Tork Dinilai | 0.82N.m |
| Kelajuan Dinilai | 560RPM |
| Arus Dinilai | 3.1A |
| Kuasa Maksimum | 57W |
| Tork Maksimum | 3N.m |
| 23.3rpm/V | |
| Kekekalan Tork | 0.26N.m/A |
| Jenis Penggulungan | Y |
| Rintangan Fasa | 2.17Ω |
| Induktans Fasa | 1.44mH |
| Pole Motor | 28 |
| Inersia Rotor | 515gcm² |
| Suatu Suhu Motor | YA |
| Beban Terpering Bearing | 280N |
| Berat Motor | 251g |
| Cadangan Pemanduan | DHF50 |
| Voltan Input Pemanduan | 7.4-32V |
| Komunikasi | RS485 ATAU CAN |
| Frekuesi Komunikasi | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Pengodok | Pengodok Magnetik 19bit |
| Kelajuan Pengodok (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Kelajuan (CAN) | 100K, 125K, 250K, 500K, 1M |
| Mod Kawalan | Gelung Tork(24KHz)/Gelung Kelajuan(8KHz)/Gelung Kedudukan(8KHz) |
| Lengkung Pecutan | Pecutan Trapeziod |
Untuk panduan pemilihan atau sokongan integrasi, hubungi pasukan perkhidmatan pelanggan di https://rcdrone.top/ atau emel [email protected] .
Permohonan
- Robot humanoid
- Tangan robot
- Exoskeleton / robot exoskeleton
- Robot quadruped / anjing mecha
- Kereta AGV / kenderaan AGV
- Robot ARU
- Robot perkhidmatan
- Lidar genggam
- Robot latihan pemulihan
- Robot pemeriksaan
Manual / Dokumen
Butiran

Format motor gaya servo yang terintegrasi dan padat memudahkan pengkabelan dan pemasangan untuk sendi robot.
Papan pemacu dan MCU yang terintegrasi menyokong penyetelan parameter dari hos untuk memudahkan pengoperasian.
 Susun atur poros berongga (bore 12.7 mm) membantu mengarahkan kabel atau poros melalui motor untuk pembinaan yang lebih kemas.
Susun atur poros berongga (bore 12.7 mm) membantu mengarahkan kabel atau poros melalui motor untuk pembinaan yang lebih kemas.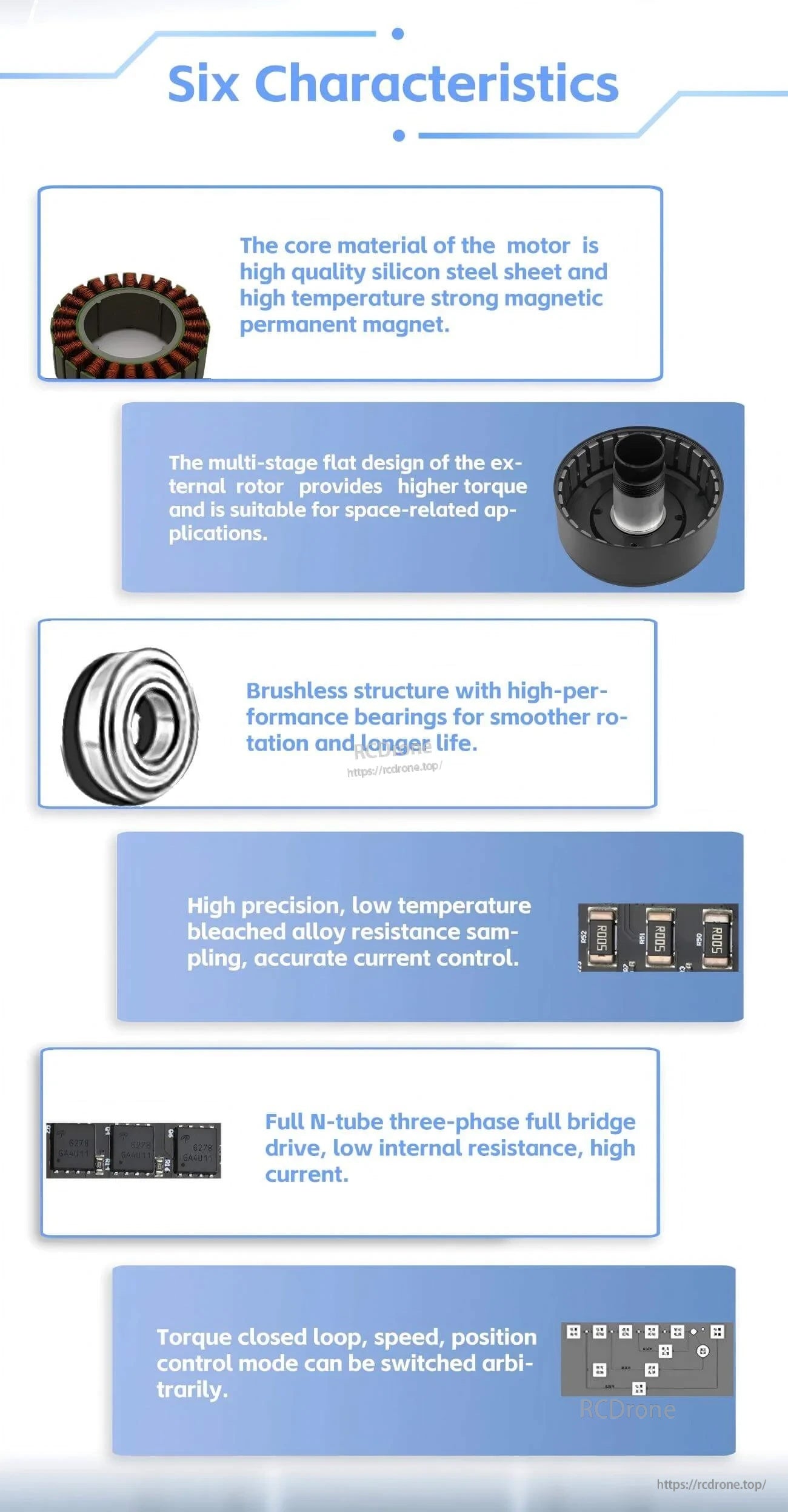
Nota reka bentuk utama merangkumi bahan, struktur tork rotor luaran, galas, dan keupayaan kawalan tertutup.
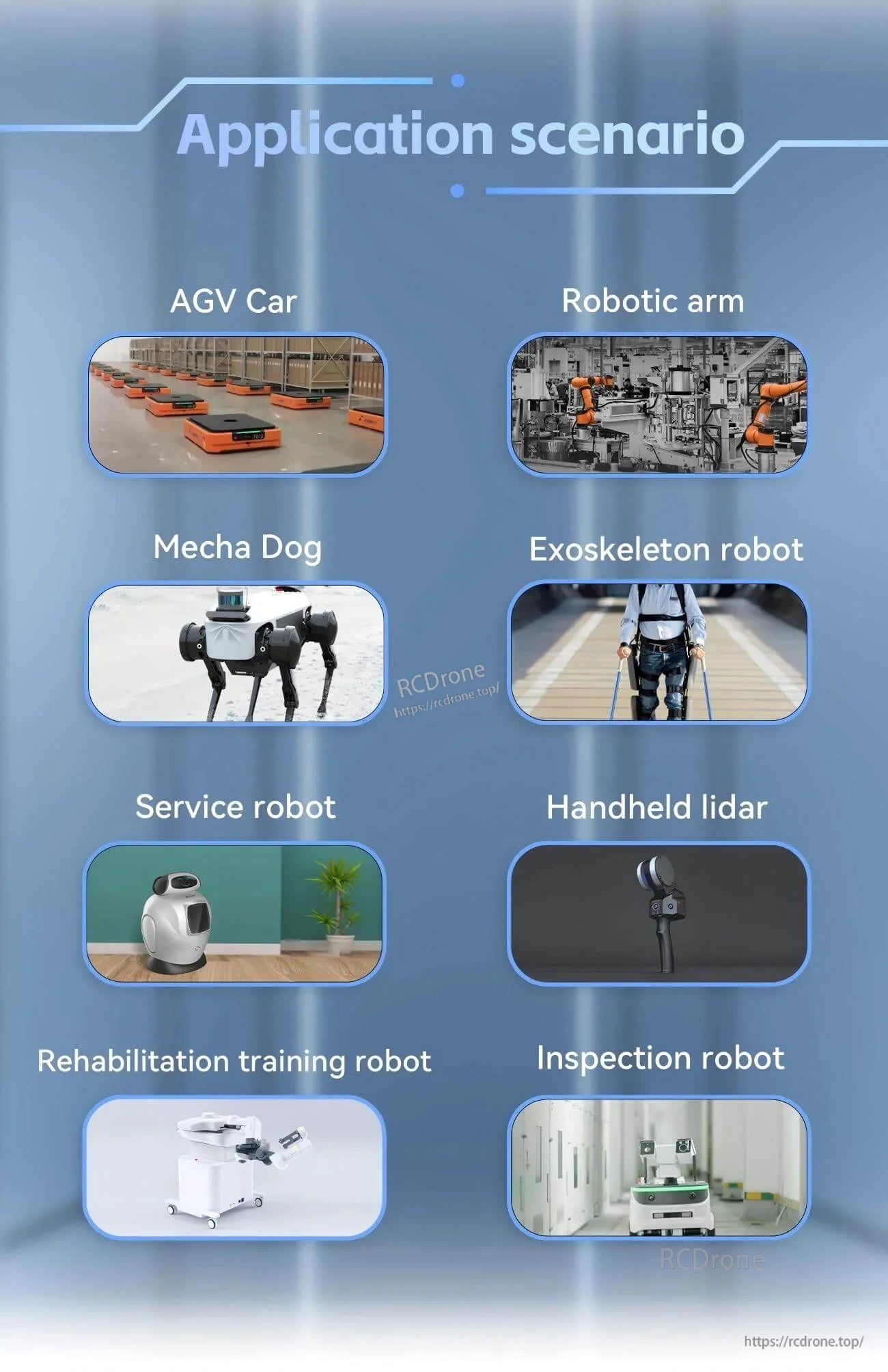
Direka untuk tugas gerakan robotik seperti AGV, lengan robot, quadruped, exoskeleton, dan robot perkhidmatan.
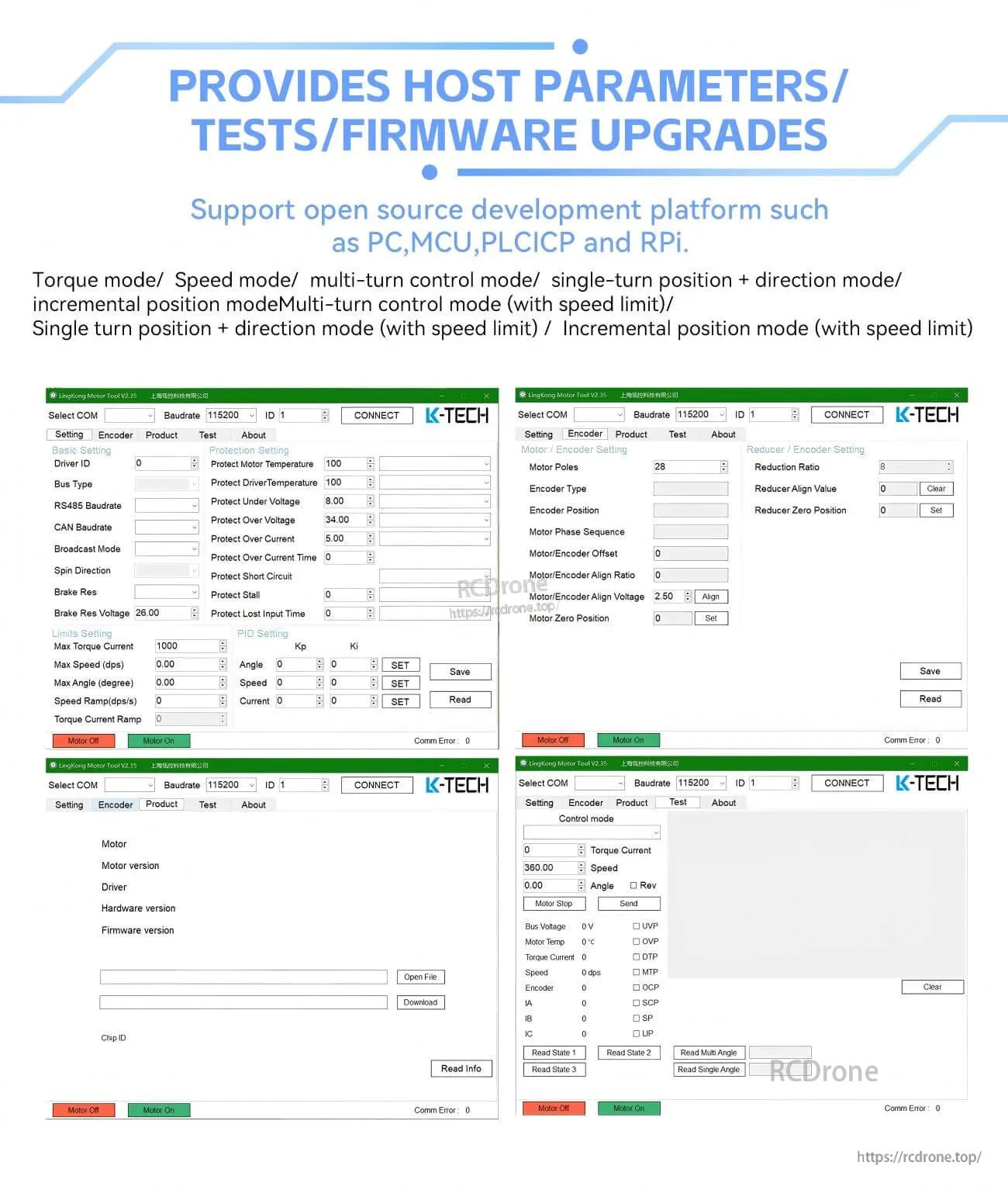
Halaman perisian PC menggambarkan tetapan parameter, fungsi ujian, dan sokongan peningkatan firmware.

Related Collections




