




MagicLab P110 Motor 360 N·m Tork Puncak, Pengekod Berkembar, Pemacu Sendi CAN/EtherCAT untuk Robot Humanoid
MagicLab P110 Motor 360 N·m Tork Puncak, Pengekod Berkembar, Pemacu Sendi CAN/EtherCAT untuk Robot Humanoid
MagicLab
Harga biasa
$5,283.00 USD
Harga biasa
Harga jualan
$5,283.00 USD
Harga seunit
per
Taxes included.
Penghantaran dikira semasa pembayaran.
Tidak dapat memuatkan ketersediaan pengambilan
Tinjauan
Motor MagicLab P110 adalah motor pemacu sendi tork tinggi yang direka untuk sendi robotik, dilengkapi dengan sistem dwi-pengekod dan pilihan komunikasi berkelajuan tinggi (CAN / EtherCAT). Ia diposisikan untuk sendi beban tinggi seperti penggerak kaki dalam robot humanoid bersaiz penuh dan robot berkaki empat berskala industri.
Ciri Utama
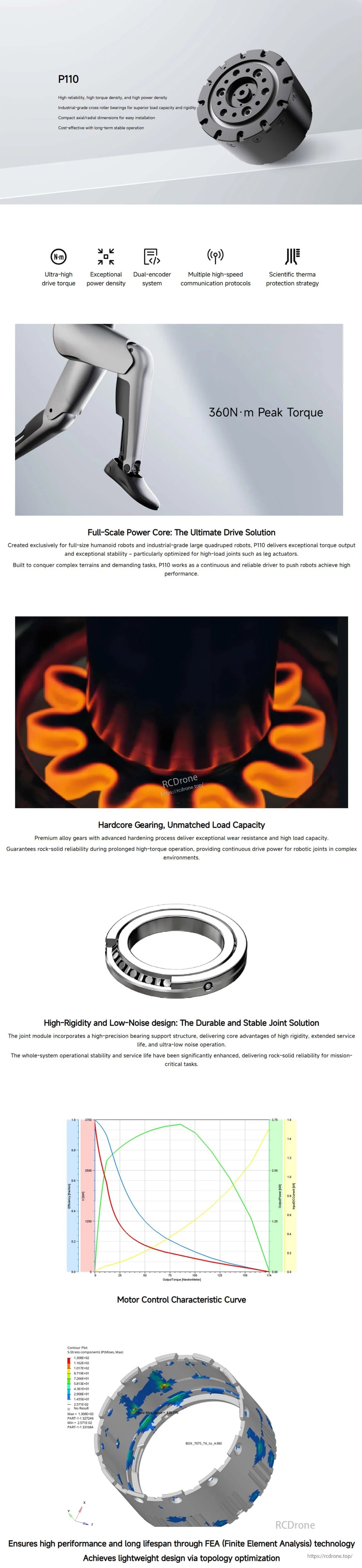
- 360 N·m tork puncak
- Tork pemacu ultra-tinggi dan ketumpatan kuasa yang luar biasa
- Sistem dwi-pengekod (resolusi pengekod motor: 15 Bit)
- Antara muka komunikasi: CAN / EtherCAT (beberapa protokol komunikasi berkelajuan tinggi)
- Strategi perlindungan terma saintifik
- Gear keras untuk kapasiti beban (gear aloi premium dengan proses pengerasan yang maju)
- Reka bentuk ketegaran tinggi, bunyi rendah dengan struktur sokongan galas berketepatan tinggi
- Teknologi FEA (Analisis Elemen Terhingga) untuk prestasi tinggi dan jangka hayat yang panjang; reka bentuk ringan sambil mengekalkan kekuatan
Aplikasi
- Robot Humanoid
- Tangan Robot
- Exoskeleton
- Robot Quadruped
- Kenderaan AGV
- Robot ARU
Spesifikasi
| Kelajuan Maksimum | 20 rpm (bekalan kuasa 24V) |
| Berat Modul | 1900g |
| Tork Dinilai | 90 N·m |
| Tork Puncak | 360 N·m |
| Dimensi | Φ112*71.5 |
| Voltan Operasi | 48V - 54V |
| Arus Puncak | 137 A |
| Antara Muka Komunikasi | CAN / EtherCAT |
| Konfigurasi Pengodok | Pengodok Dwi |
| Resolusi Pengodok Motor | 15 Bit |
| Frekuesi Kawalan | 25,000 Hz |
| Persekitaran Operasi yang Disyorkan | -5°C ~ 40°C |
Untuk pertanyaan mengenai integrasi, antara muka, atau konfigurasi, hubungi [email protected] or lawati https://rcdrone.top/.
Butiran
Dibina untuk sendi humanoid dan quadruped yang berkapasiti tinggi, MagicLab P110 menggabungkan tork puncak 360 N·m dengan maklum balas pengodok dwi dan komunikasi CAN/EtherCAT untuk penggerakan yang tepat dan responsif.
Related Collections




