MATEK CAN-L4-BM - Mateksys AP_PERIPH BOLEH DIGITAL POWER MONITOR
MATEK CAN-L4-BM - Mateksys AP_PERIPH BOLEH DIGITAL POWER MONITOR
MATEKSYS
Tidak dapat memuatkan ketersediaan pengambilan
MATEK CAN-L4-BM - Mateksys AP_PERIPH BOLEH DIGITAL POWER MONITOR SPESIFIKASI
Gunakan: Kenderaan & Alat Mainan Kawalan Jauh
Syorkan Umur: 12+y,14+y
Asal: Tanah Besar China
Bahan: Bahan Komposit
Nama Jenama: MATEKSYS
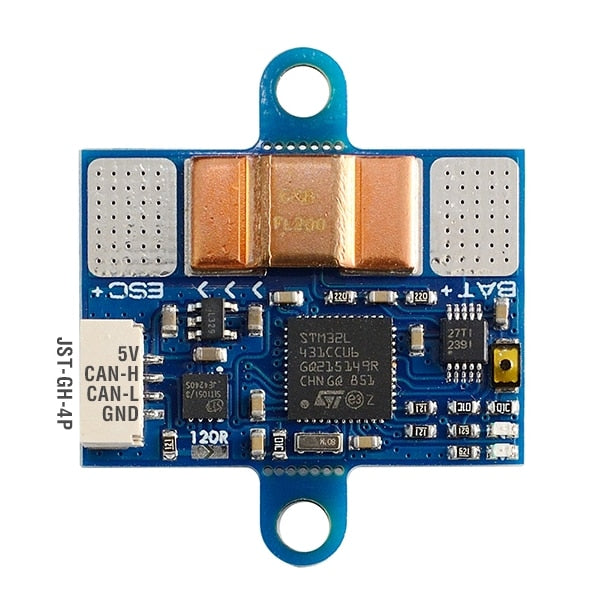
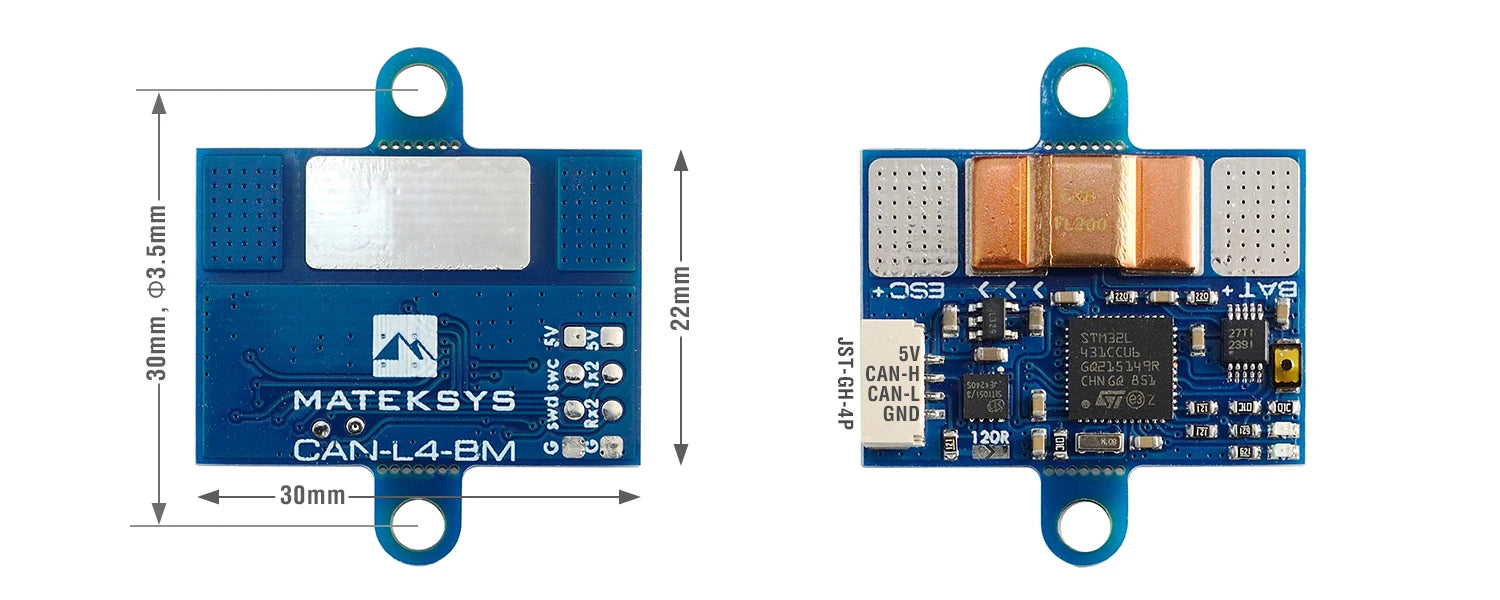
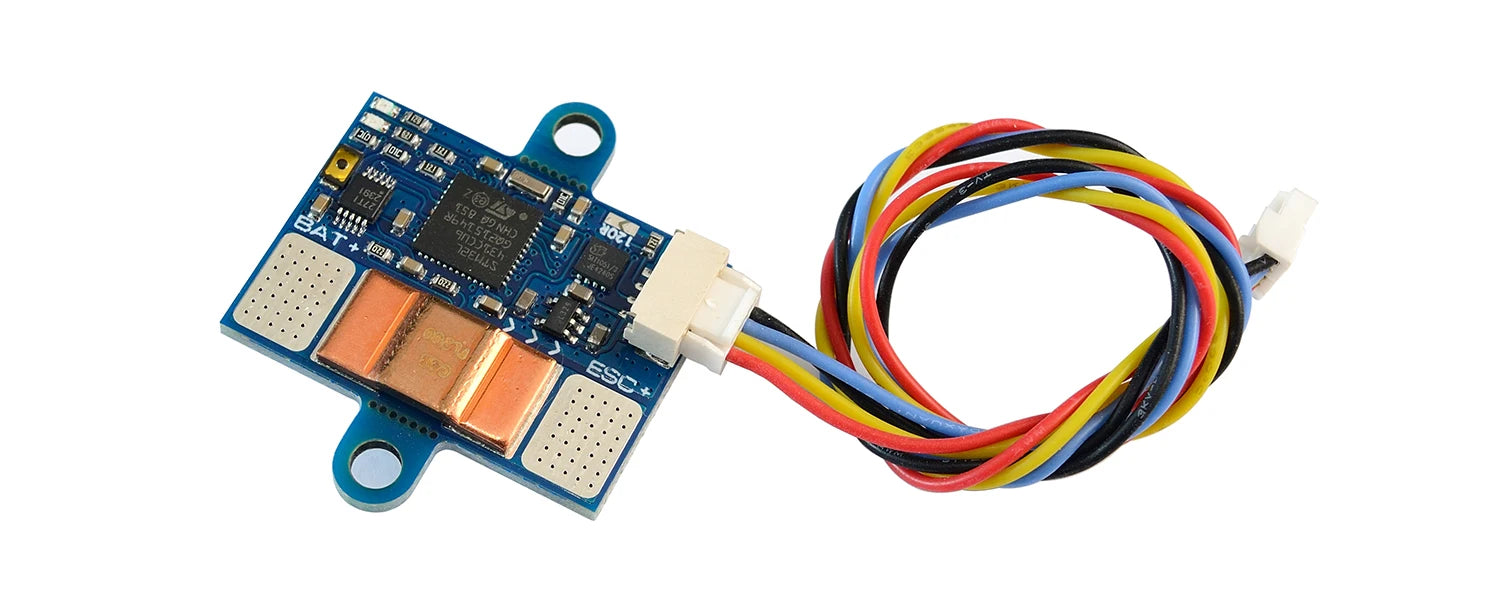
AP_PERIPH BOLEH DIGITAL POWER MONITOR, CAN-L4-BM
Arus 0~204.8A, Voltan 0~85V, protokol CAN/DroneCAN
-
CAN-L4-BM ialah monitor kuasa digital ultra-tepat berdasarkan perisian tegar TI INA239 & ArudPilot AP_Periph.
-
Rintangan laluan konduktif ini adalah tipikal 200 μΩ, memberikan kehilangan kuasa yang rendah dalam aplikasi.
-
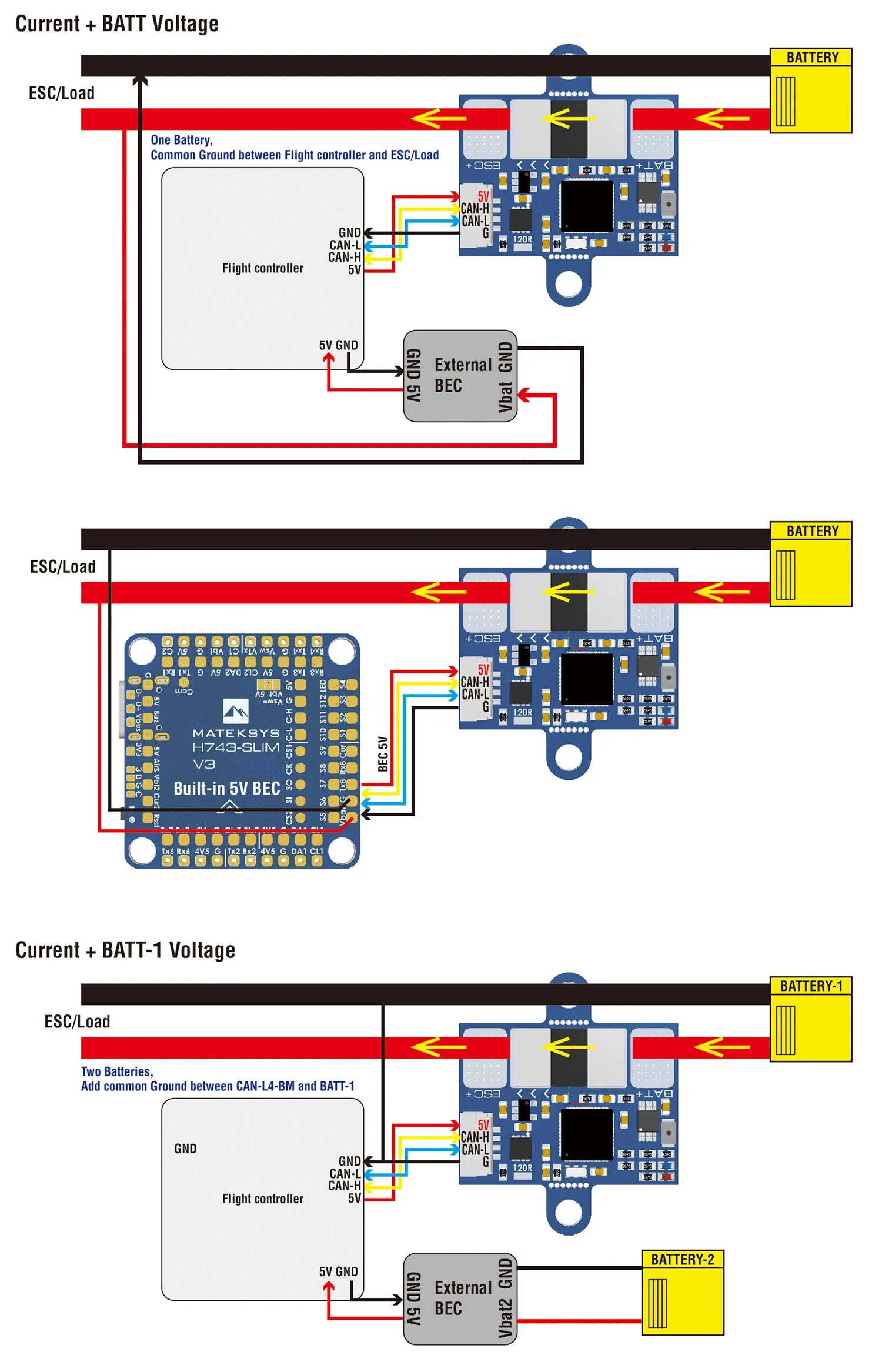
Dengan peranti ini, Tiada penentukuran diperlukan, pengawal penerbangan yang menyokong protokol DroneCAN boleh mendapatkan bacaan voltan semasa & bas yang tepat melalui bas CAN dengan mudah.
Spesifikasi
-
MCU: STM32L431xC, Denyar 256KB
-
INA239 85-V, 16-Bit, IC monitor Kuasa Ketepatan Tinggi Dengan Antara Muka SPI
-
Input deria Voltan Bateri: 0~85V
-
Julat Deria Semasa: 0~204.8A
-
Muatkan arus pada perintang pengesan semasa: 150A(Berterusan), 204.8A(Burst)
-
Ketepatan voltan: ± 0.1%
-
Ketepatan semasa: ± 2%
-
Antaramuka
-
BOLEH, Protokol DroneCAN
-
UART2, ganti, DFU
-
Nyahpepijat ST, SWCLK & SWDIO
-
-
LED
-
Biru, Berkelip cepat, But
-
Biru, Berkelip perlahan, berfungsi
-
Merah, penunjuk 3.3V
-
Bekalan kuasa untuk papan CAN-L4-BM : 4.5~5.5V @5V pad/pin
-
Penggunaan kuasa: 10mA
-
Suhu Operasi: -40~85 °C
-
Fizikal
-
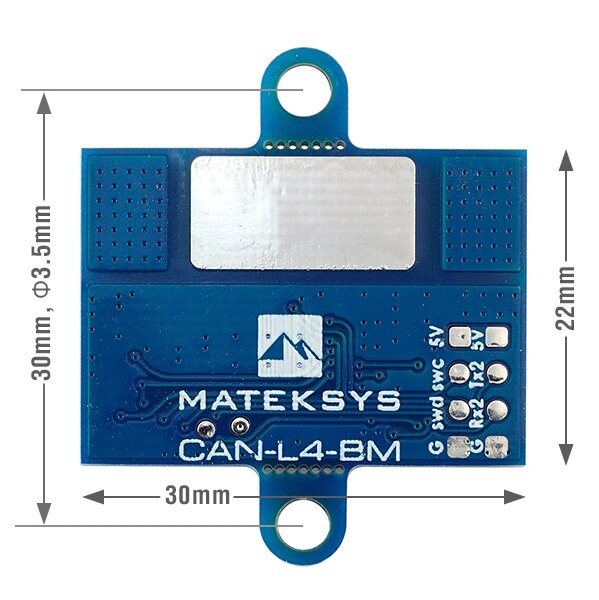
Saiz Papan: 30mm*22mm*3mm. 4g
-
Fail 3D : CAN-L4-BM_STEP.zip
-
-
Perisian tegar
-
ArduPilot AP_Periph MatekL431-BattMon
-
Kemas kini melalui Alat GUI DroneCAN
-
-
Parameter
-
CAN_P1_DRIVER = 1 jika dilampirkan pada port CAN bus1 atau CAN_P2_DRIVER = 1 jika dilampirkan pada port CAN bus2
-
BATTx_MONITOR = 8 (DroneCAN-BatteryInfo)
-
Membungkus
-
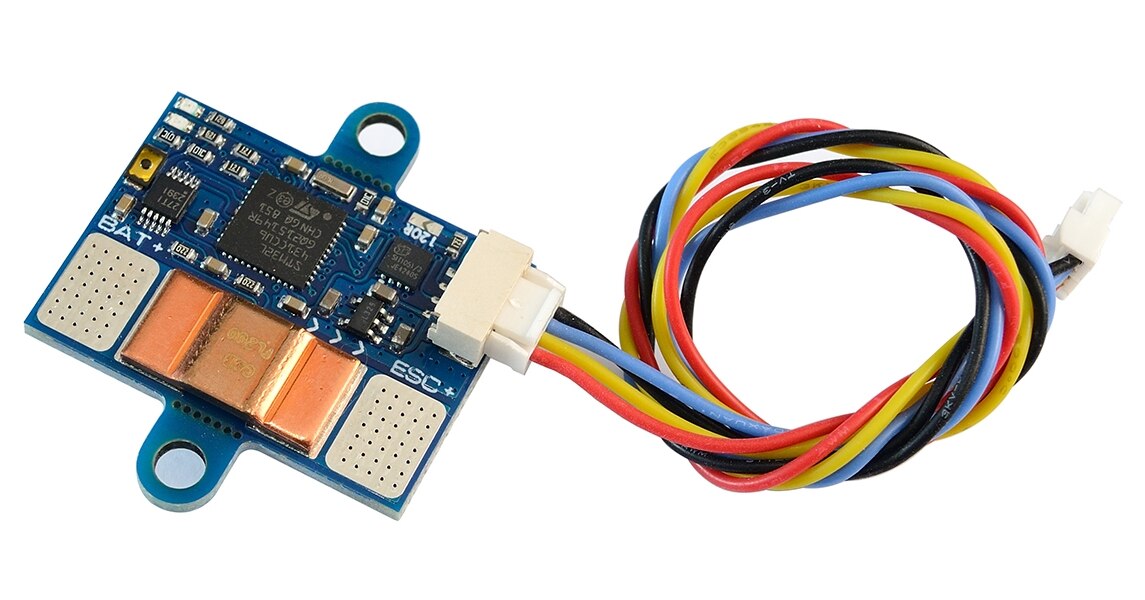
1x papan CAN-L4-BM
-
1x JST-GH-4P ke JST-GH-4P 20cm wayar silikon
Petua
-
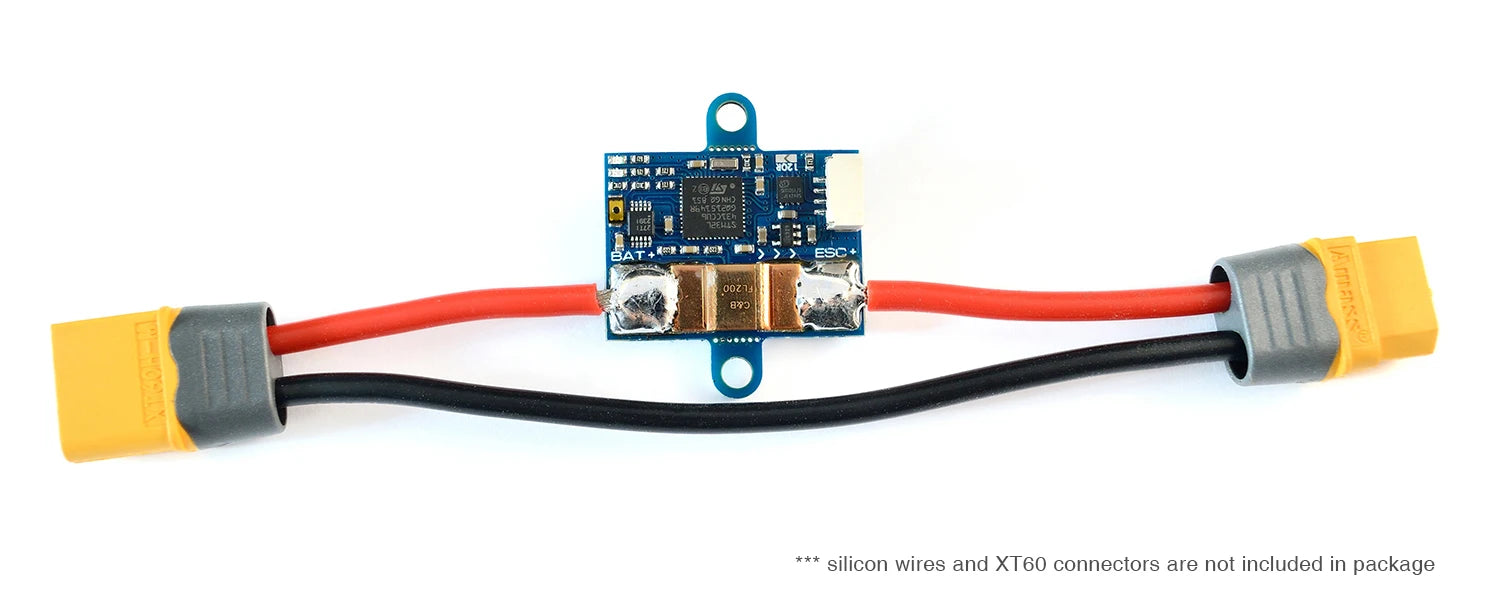
Pad besar di bahagian bawah ialah pad mati. Tiada sebarang rangkaian litar padanya.
-
Pateri wayar positif sedekat mungkin dengan kedua-dua belah perintang pengesan semasa.
-
2 telinga untuk pemasangan boleh dipotong jika anda tidak memerlukannya.
-
Jika wayar CAN terlalu panjang, rapatkan pelompat "120R".
Related Collections