Modul GPS MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
Modul GPS MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEKSYS
Tidak dapat memuatkan ketersediaan pengambilan
MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS SPESIFIKASI
Gunakan: Kenderaan & Alat Mainan Kawalan Jauh
Syorkan Umur: 12+y,14+y,6-12y
Asal: Tanah Besar China
Bahan: Bahan Komposit
Nama Jenama: MATEKSYS
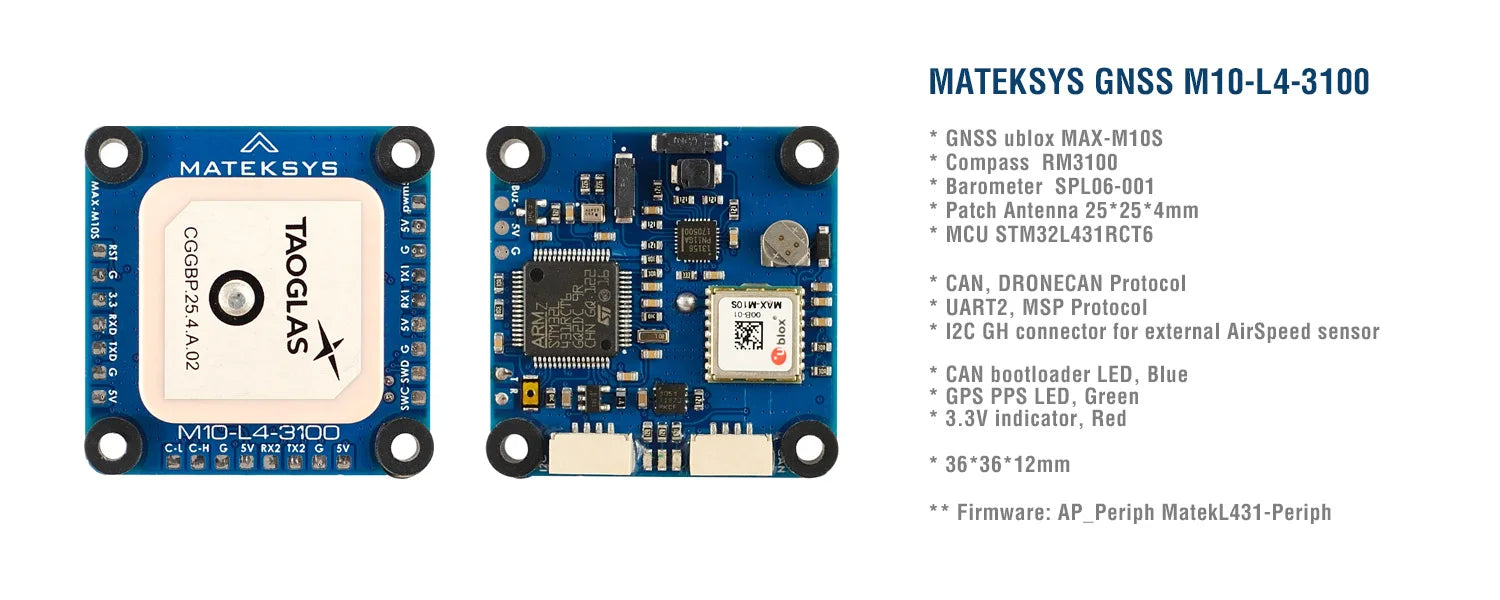
AP_PERIPH GNSS M10-L4-3100
AP_Periph L431 CAN nod, MAX-M10S, RM3100, SPL06-001, protokol DroneCAN & UART_MSP
-
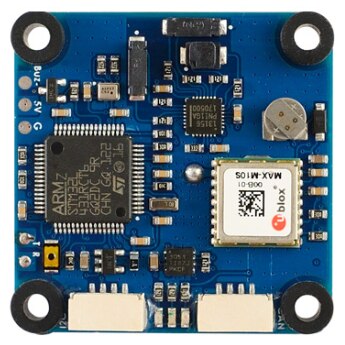
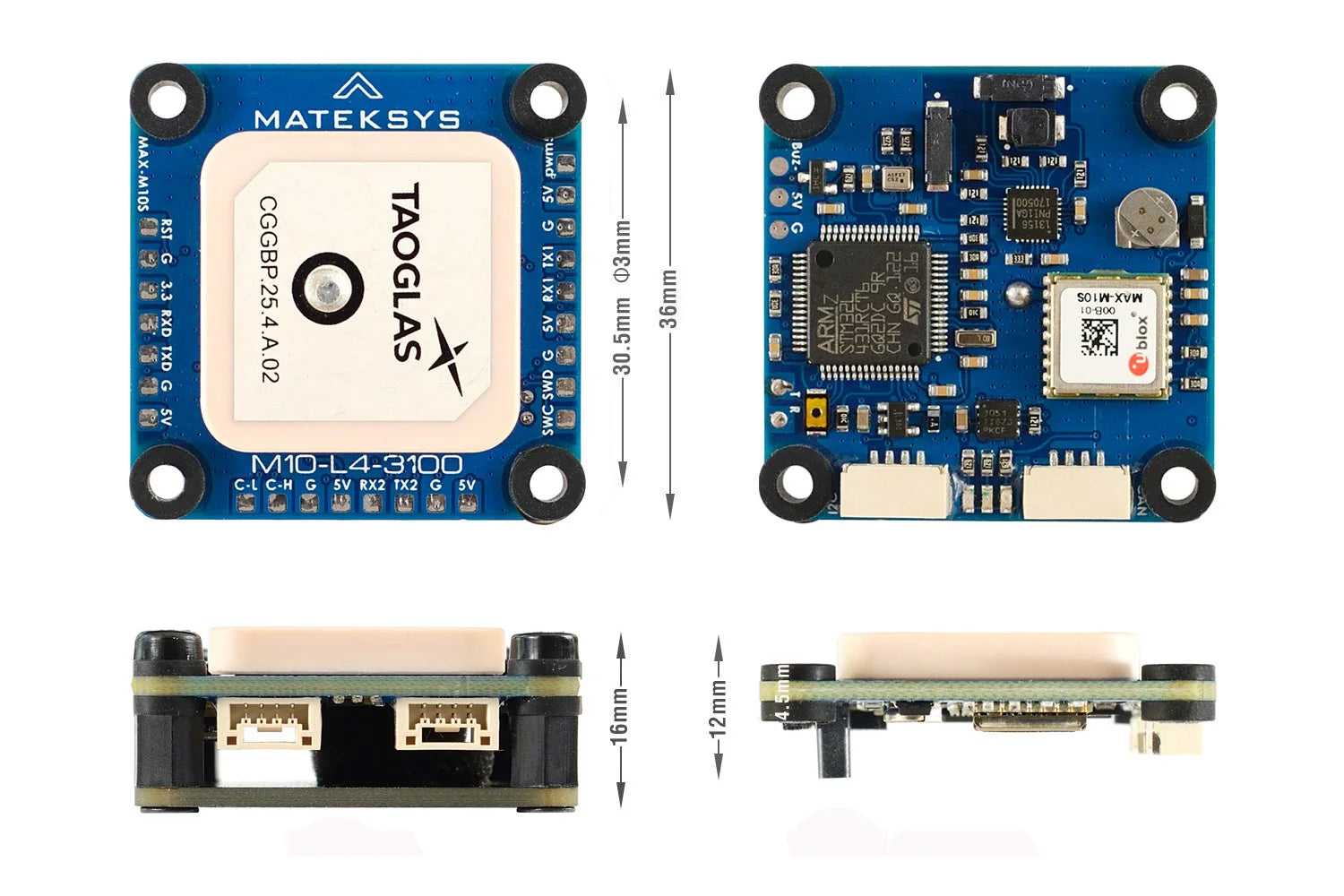
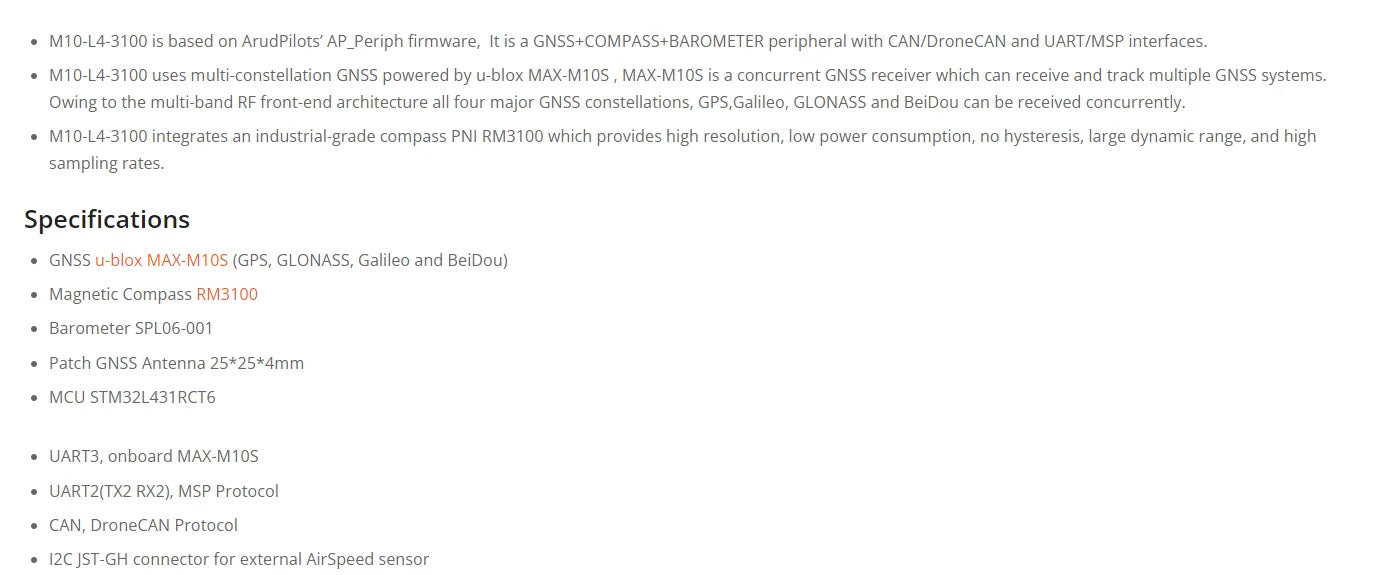
M10-L4-3100 adalah berdasarkan perisian tegar AP_Periph ArudPilots, Ia ialah peranti GNSS+COMPASS+BAROMETER dengan antara muka CAN/DroneCAN dan UART/MSP.
-
M10-L4-3100 menggunakan GNSS berbilang buruj yang dikuasakan oleh u-blox MAX-M10S , MAX-M10S ialah penerima GNSS serentak yang boleh menerima dan menjejaki berbilang sistem GNSS. Disebabkan oleh seni bina bahagian hadapan RF berbilang jalur, kesemua empat buruj GNSS utama, GPS, Galileo, GLONASS dan BeiDou boleh diterima serentak.
-
M10-L4-3100 menyepadukan kompas gred industri PNI RM3100 yang memberikan resolusi tinggi, penggunaan kuasa yang rendah, tiada histerisis, julat dinamik yang besar dan kadar pensampelan yang tinggi.

konfigurasi lalai pada MAX-M1OS dengan ublox FWS . ialah penerimaan serentak GPS, Galileo dan BeiDou BI dengan QZSS dan SBAS didayakan . GLONASS dilumpuhkan secara lalai Beidou B1I (1575.42 MHz) dan tidak boleh didayakan pada masa yang sama .
CAN (protokol UAVCAN) Sambungan
-
M10-L4-3100 5V — FC 4.5V ~ 5.3V
-
M10-L4-3100 CAN-H — FC CAN High
-
M10-L4-3100 CAN-L — FC CAN Rendah
-
M10-L4-3100 G — FC G/GND
Parameter UAVCAN FC(ArduPilot)
-
CAN_D1_PROTOCOL -> 1
-
CAN_P1_DRIVER -> 1
-
GPS_TYPE -> 9 (DroneCAN)
-
COMPASS_TYPEMASK -> 0 (pastikan DroneCAN Nyahtanda)
—————————————————————————
Jika anda menyambungkan penderia kelajuan udara I2C ke port I2C M10-L4-3100
-
ARSPD_TYPE -> 8 (UAVCAN)
-
ARSPD_USE -> 1
Dan anda mesti menetapkan parameter CAN Nod untuk penderia kelajuan udara yang disambungkan ke port I2C M10-L4-3100
Perancang Misi > Persediaan Awal > Perkakasan Pilihan > UAVCAN > Mod SLCan CAN1 > Parameter
-
MS4525 ARSP_TYPE -> 1 (lalai dalam hwdef)
-
MS5525 ARSP_TYPE -> 3 menyokong MS5525 dengan alamat 0x77 sahaja
-
SDP3X ARSP_TYPE -> 6
-
DLVR-L10D ARSP_TYPE -> 9
-
Tulis dan but semula
—————————————————————————
Jika anda menyambungkan DIN 2812LED ke pad PWM5
-
NTF_LED_TYPES -> (pastikan DroneCAN ditandakan)
Mod SLCan CAN1 > Parameter
-
OUT5_FUNCTION 120
-
NTF_LED_TYPES 455
-
AP_Periph fw mestilah “MatekL431-Periph”, Ciri MSP dilumpuhkan dalam “MatekL431-GPS”
Sambungan UART (protokol MSP)
-
M10-L4-3100 5V — FC 4.0V ~ 5.3V
-
M10-L4-3100 TX2 — FC ganti UART_RX
-
M10-L4-3100 RX2 — FC ganti UART_TX (tidak penting)
-
M10-L4-3100 G — FC G/GND
ArduPilot (sejak 4.1.x) Parameter FC
-
Serialx_PROTOCOL = 32 (MSP) dengan x ialah port SIRI yang digunakan untuk sambungan pada autopilot.
-
Serialx_BAUD = 115 dengan x ialah port SERIAL yang digunakan untuk sambungan pada autopilot.
-
JENIS GPS = 19 (MSP)
-
BARO_PROBE_EXT = 4096 (MSP Baro)
-
BARO_PRIMARY = 1 (Jika anda mahu menggunakan MSP baro sebagai baro utama, jika tidak, biarkan sebagai lalai)
-
COMPASS_TYPEMASK 0 (atau pastikan bit MSP tidak ditandakan)
INAV (sejak 2.6) Parameter FC
-
M10-L4-3100 serasi dengan mana-mana pengawal penerbangan yang disokong oleh INAV melalui UART ganti.
-
Dalam tab port, Dayakan MSP pada UART sepadan yang disambungkan M10-L4-3100, JANGAN dayakan “GPS” pada UART itu. pilih Baudrate 115200.
-
ciri GPS
-
tetapkan gps_provider = MSP
-
tetapkan mag_hardware = MSP
-
tetapkan baro_hardware = MSP
-
set align_mag = CW90, jika kompas dipasang rata dengan anak panah menghadap ke hadapan dan anak panah pengawal penerbangan juga menghadap ke hadapan.
Related Collections