


Pengawal Penerbangan MATEKSYS H7A3-SLIM - ICM42688P - 30x30
Pengawal Penerbangan MATEKSYS H7A3-SLIM - ICM42688P - 30x30
MATEKSYS
Tidak dapat memuatkan ketersediaan pengambilan
The MATEKSYS H7A3-SLIM Pengawal Penerbangan menawarkan prestasi tinggi dalam reka bentuk kompak 30x30mm. Ia dilengkapi dengan MCU STM32H7A3RIT6, pemproses Cortex-M7 280MHz, RAM 1.4MB, dan Flash 2MB. Dengan ICM42688P IMU, barometer SPL06-001, AT7456E OSD, dan Blackbox Flash 128MB, ia menyediakan data yang tepat dan log yang mencukupi. Pengawal ini termasuk 6 UART, 11 output PWM, 1 I2C, 1 port CAN, dan 4 saluran ADC. Ia juga mempunyai tiga LED status, port USB Type-C, dan output 9V yang boleh ditukar. Dengan corak pemasangan 30.5 x 30.5mm, lubang 4mm, grommet 3mm, dan berat hanya 7g, ia sempurna untuk perlumbaan FPV dan penerbangan freestyle. Fail langkah 3D disertakan untuk integrasi khusus.
Ciri-ciri
- Paparan Skrin
- Pemasangan 30x30
- Reka Bentuk Kompak
- Konektiviti
- Ringan
Spesifikasi
Spesifikasi
- MCU: STM32H7A3RIT6, 280MHz Cortex-M7, 1.4MB RAM, 2MB Flash
- IMU: ICM42688P
- Baro: SPL06-001
- OSD: AT7456E
- Blackbox: 128MB Flash (1G-bit NAND)
- 6x Uarts (1,2,3,4, 5, 6) dengan pembalikan terbina dalam.
- 11x output PWM
- 1x I2C
- 1x CAN
- 4x ADC (VBAT, Arus, VB2, Cur2)
- 3x LED untuk STATUS FC (Biru, Merah) dan penunjuk 3.3V (Merah)
- USB Jenis-C (USB2.0)
- 8x output PWM pada 2x penyambung JST-SH1.0_8pin untuk 2x 4in1 ESC
- 1x penyambung JST-GH1.25_4pin (5V/CAN-H/CAN-L/G)
- Suis ON/OFF output 9V boleh ditukar
- Video digital OSD disokong oleh mana-mana UART yang tersedia
Kuasa
- Input Vbat: 6~36V (2~8S LiPo)
- BEC: 5V 2A berterusan. (Maks.3A)
- BEC: 9V 2A berterusan. (Maks.3A)
- LDO 3.3V: Maks.200mA
- Tiada Sensor Arus terbina dalam
- Pad ADC VB2 menyokong Maks. 69V (pembahagi voltan: 1K:20K)
Firmware FC
- ArduPilot: MATEKH7A3 (4.6 atau lebih baru)
- ArduPlane https://firmware.ardupilot.org/Plane/beta/MatekH7A3/
- ArduCopter &https://firmware.ardupilot.org/Copter/beta/MatekH7A3/
- Flashing dengan STM32CubeProgrammer
Fizikal
- Pemasangan: 30.5 x 30.5mm, Φ4mm dengan Grommet Φ3mm
- Dimensi: 36 x 36 x 5 mm
- Berat: 7g
- 3D langkah H7A3-SLIM_step.zip
Termasuk
- 1x H7A3-SLIM
- 6x Grommet silikon M4 ke M3
- 2x JST-SH1.0_8pin kabel, 5cm, & penyambung 8pin
- 1x kabel JST-GH-4P ke JST-GH-4P untuk port CAN, 20cm
Butiran

Pengawal penerbangan MATEKSYS H7A3-SLIM menggunakan MCU STM32H7A3 dengan ICM42688P IMU dan port USB-C dalam corak pemasangan 30.5mm.

Pengawal penerbangan MATEKSYS H7A3-SLIM menggunakan susun atur kompak 30x30 dengan port USB-C dan pad yang jelas dilabel untuk pengkabelan yang kemas.

MATEKSYS H7A3-SLIM menggunakan penyambung JST-SH 1.0 8-pin berganda serta port JST-GH 4-pin dan USB Type-C untuk pengkabelan yang kemas dan penyediaan yang mudah.

MATEKSYS H7A3-SLIM menggunakan pad dan port solder yang jelas dilabel untuk sambungan video kamera/VTx, UART, CAN, dan kuasa.
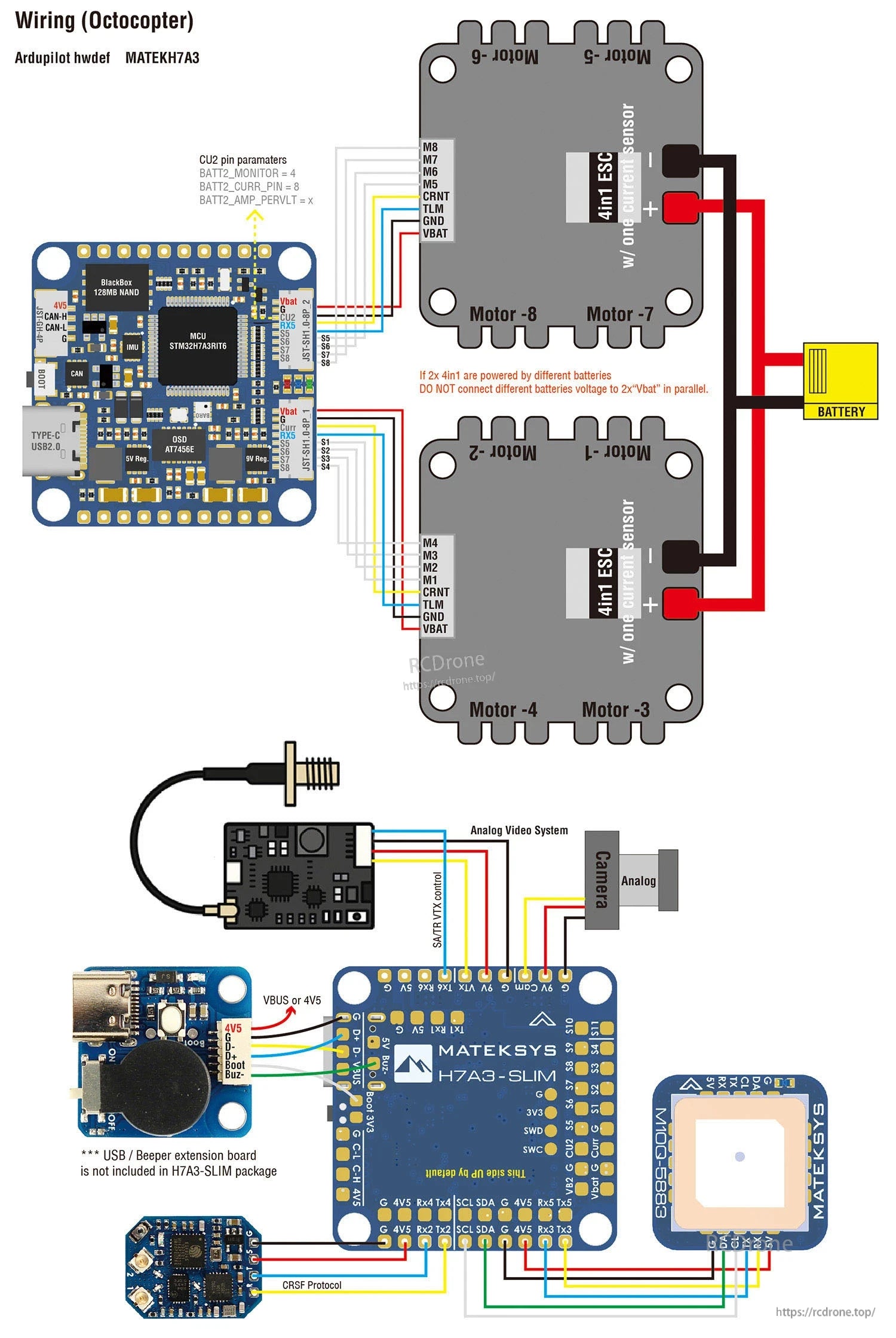
MATEKSYS H7A3-SLIM menggunakan pad yang dilabel dengan jelas untuk menyambungkan dual 4-in-1 ESC, kuasa VBAT, GPS, penerima, dan komponen video analog.

Pemetaan ArduPilot
| ArduPilot | ||||||
| PWM | S1 | PWM1 GPIO50 | I/O toleran 5 V | TIM1_CH2 | DMA/Bi-DShot | Kumpulan1 |
| S2 | PWM2 GPIO51 | I/O toleran 5 V | TIM1_CH3 | DMA/Bi-DShot | ||
| S3 | PWM3 GPIO52 | I/O toleran 5 V | TIM2_CH1 | DMA/Bi-DShot | Kumpulan2 | |
| S4 | PWM4 GPIO53 | I/O toleran 5 V | TIM2_CH2 | DMA/Bi-DShot | ||
| S5 | PWM5 GPIO54 | I/O toleran 5 V | TIM3_CH3 | DMA/Bi-DShot | Gourp3 | |
| S6 | PWM6 GPIO55 | I/O toleran 5 V | TIM3_CH4 | DMA/Bi-DShot | ||
| S7 | PWM7 GPIO56 | I/O toleran 5 V | TIM3_CH1 | DMA/Bi-DShot | ||
| S8 | PWM8 GPIO57 | I/O toleran 5 V | TIM3_CH2 | DMA/Bi-DShot | ||
| S9 | PWM9 GPIO58 | I/O toleran 5 V | TIM4_CH1 | DMA/DShot | Group4 | |
| S10 | PWM10 GPIO59 | I/O toleran 5 V | TIM4_CH2 | DMA/DShot | ||
| S11 | PWM11 GPIO60 | 5 V toleran I/O | TIM16_CH1 | DMA/DShot | Kumpulan5 | |
| PWM1~PWM11 adalah Dshot dan mampu PWM.Namun, menggabungkan operasi Dshot dan PWM biasa untuk output adalah terhad kepada kumpulan, iaitu. mengaktifkan Dshot untuk output dalam kumpulan memerlukan bahawa SEMUA output dalam kumpulan itu dikonfigurasikan dan digunakan sebagai Dshot, bukannya output PWM. Jika servo dan motor dicampurkan dalam kumpulan yang sama, pastikan kumpulan ini menjalankan frekuensi PWM terendah mengikut spesifikasi servo. Iaitu. Jika Servo menyokong Max. 50Hz, ESC mesti beroperasi pada 50Hz dalam kumpulan ini. |
||||||
| PINIO | Suis 9V | GPIO81 | RELAY1_PIN | 81 | ||
| ADC | Pad Vbat | BATT_VOLTAGE_SENS | 6~36V | BATT_VOLT_PIN BATT_VOLT_MULT |
10 21.0 |
|
| Pad Curr | BATT_CURRENT_SENS | 0~3.3V | BATT_CURR_PIN BATT_AMP_PERVLT |
11 X |
||
| VB2 Pad | BATT2_VOLTAGE_SENS | 0~69V | BATT2_VOLT_PIN BATT2_VOLT_MULT |
18 21.0 |
||
| CU2 Pad | BATT2_CURRENT_SENS | 0~3.3V | BATT2_CURR_PIN BATT2_AMP_PERVLT |
8 X |
||
| I2C | SCL/SDA | I2C3 | I/O toleran 5V | papan Baro SPL06-001 | Alamat | 0x76 |
| Kelajuan Udara Digital I2C MS4525 DLVR-L10D |
ARSPD_BUS ARSPD_TYPE ARSPD_TYPE |
0 1 9 |
||||
| Magnetometer | COMPASS_AUTODEC | 1 | ||||
| CAN | C-H/C-L | CAN2 | I/O toleran 5V | CAN | CAN_D1_PROTOCOL CAN_P1_DRIVER |
1 1 |
BOLEH GPS BOLEH Kompas BOLEH sensor kelajuan udara |
JENIS_GPS MASKER_JENIS_KOMPAS JENIS_ARSPD |
9 0 8 |
| UART | USB | USB | konsol | PROTOKOL_SERIAL0 | 2 | |
| TX1 RX1 | USART1 w/DMA | I/O toleran 5 V | Telemetri | PROTOKOL_SERIAL1 | 2 | |
| TX2 RX2 | USART2 w/DMA | I/O toleran 5 V | input RC/Penerima | PROTOKOL_SERIAL2 | 23 | |
| TX3 RX3 | USART3 w/DMA | I/O toleran 5 V | GPS | PROTOKOL_SERIAL3 | 5 | |
| TX4 RX4 | UART4 tanpa DMA | I/O toleran 5 V | Simpan | PROTOKOL_SERIAL4 | -1 | |
| TX5 RX5 | UART5 tanpa DMA | I/O toleran 5 V | Simpan | PROTOKOL_SERIAL5 | -1 | |
| TX6 RX6 | USART6 tanpa DMA | I/O toleran 5 V | Simpan | PROTOKOL_SERIAL6 | -1 | |
INPUT RC
Input RC dikonfigurasikan pada USART2 (SERIAL2).Ia menyokong semua protokol RC bersiri. SERIAL2_PROTOCOL=23 secara lalai.
- PPM tidak disokong.
- CRSF memerlukan sambungan Tx2 & Rx2, dan set SERIAL2_OPTIONS kepada “0” (lalai).
- SBUS/DSM/SRXL disambungkan ke pin Rx2, tetapi SBUS memerlukan SERIAL2_OPTIONS ditetapkan kepada “3”.
- FPort memerlukan sambungan ke Tx2, dan set SERIAL2_OPTIONS kepada “7”. Jika Telemetri tidak berfungsi, cuba set SERIAL7_OPTIONS = 135.
- SRXL2 memerlukan sambungan ke Tx2, dan secara automatik menyediakan telemetri. Set SERIAL2_OPTIONS kepada “4”.
- Mana-mana UART boleh digunakan untuk sambungan sistem RC dalam ArduPilot juga, dan adalah serasi dengan semua protokol kecuali PPM. Lihat Sistem Kawalan Radio untuk butiran.
ArduPilot Relay(PINIO)
- 9V output AKTIF secara lalai
- PC13 PINIO1 KELUARAN GPIO(81) //kuasa 9V switche.g.
- FUNGSI_RELAY1 1
- PIN_RELAY1 81 // PINIO1 GPIO
- RC7_OPSI 28 //Relay Hidup/Mati, Gunakan CH7 Pemancar untuk menetapkan 9V HIDUP/MATI
Ciri yang dikonfigurasikan akan diaktifkan apabila nilai pwm suis tambahan melebihi 1800. Ia akan dinyahaktifkan apabila nilai jatuh di bawah 1200.
Semak nilai pwm yang dihantar dari pemancar apabila suis berada dalam keadaan tinggi dan rendah menggunakan Skrin Penyetelan Awal >> Perkakasan Wajib >> Kalibrasi Radio dalam Mission Planner.Jika ia tidak mendaki lebih tinggi daripada 1800 atau lebih rendah daripada 1200, adalah terbaik untuk menyesuaikan titik akhir servo dalam pemancar.
Related Collections


