Modul GPS & Kompas MATEKSYS M9N-5883 GNSS, u-blox NEO-M9N + QMC5883L, JST-GH-6P
Modul GPS & Kompas MATEKSYS M9N-5883 GNSS, u-blox NEO-M9N + QMC5883L, JST-GH-6P
MATEKSYS
Tidak dapat memuatkan ketersediaan pengambilan
Gambaran Keseluruhan
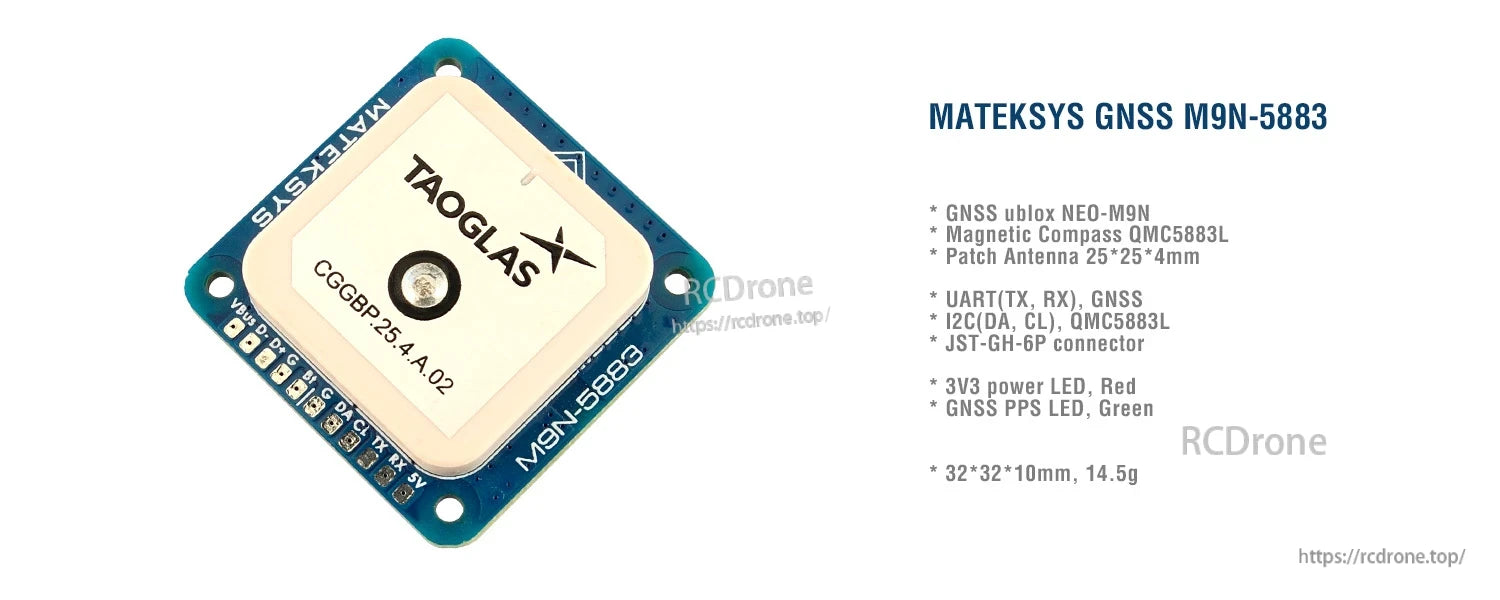
MATEKSYS M9N-5883 GNSS & Modul GPS Kompas adalah penerima GNSS multi-konstelasi yang berdasarkan u-blox NEO-M9N, digabungkan dengan kompas magnetik QMC5883L. Dengan seni bina depan RF multi-band, ia boleh menerima GPS, Galileo, GLONASS, dan BeiDou secara serentak.
Ciri-ciri Utama
- GNSS: penerima serentak u-blox NEO-M9N (GPS, GLONASS, Galileo, BeiDou)
- Kompas magnetik: QMC5883L
- Antara muka: UART (TX, RX) untuk GNSS; I2C (DA, CL) untuk kompas
- Penyambung JST-GH-6P
- LED Status: LED kuasa 3.3V (Merah); LED GNSS PPS (Hijau), berkelip (1Hz) apabila GNSS mempunyai tetap 3D
- Reset penerima: menghubungkan pad “RST” ke Tanah selama sekurang-kurangnya 100 ms mencetuskan permulaan sejuk (pilihan pemulihan)
Perkhidmatan pelanggan: [email protected] (atau https://rcdrone.top/).
Spesifikasi
| Penerima GNSS | u-blox NEO-M9N |
| Konstelasi yang disokong | GPS, GLONASS, Galileo, BeiDou |
| Kompas magnetik | QMC5883L |
| Antenna patch | 25*25*4mm |
| Julat voltan input | 4~5.5V (5V pad/pin) |
| Penggunaan kuasa | 50mA |
| Kelajuan baud UART | 38400 lalai |
| Suhu operasi | -20~80 °C |
| Antara muka GNSS | UART (TX, RX) |
| Antara muka kompas | I2C (DA, CL) |
| Penyambung | JST-GH-6P |
| Petunjuk LED | LED Kuasa 3.3V (Merah); LED GNSS PPS (Hijau), berkelip (1Hz) apabila GNSS mempunyai 3D tetap |
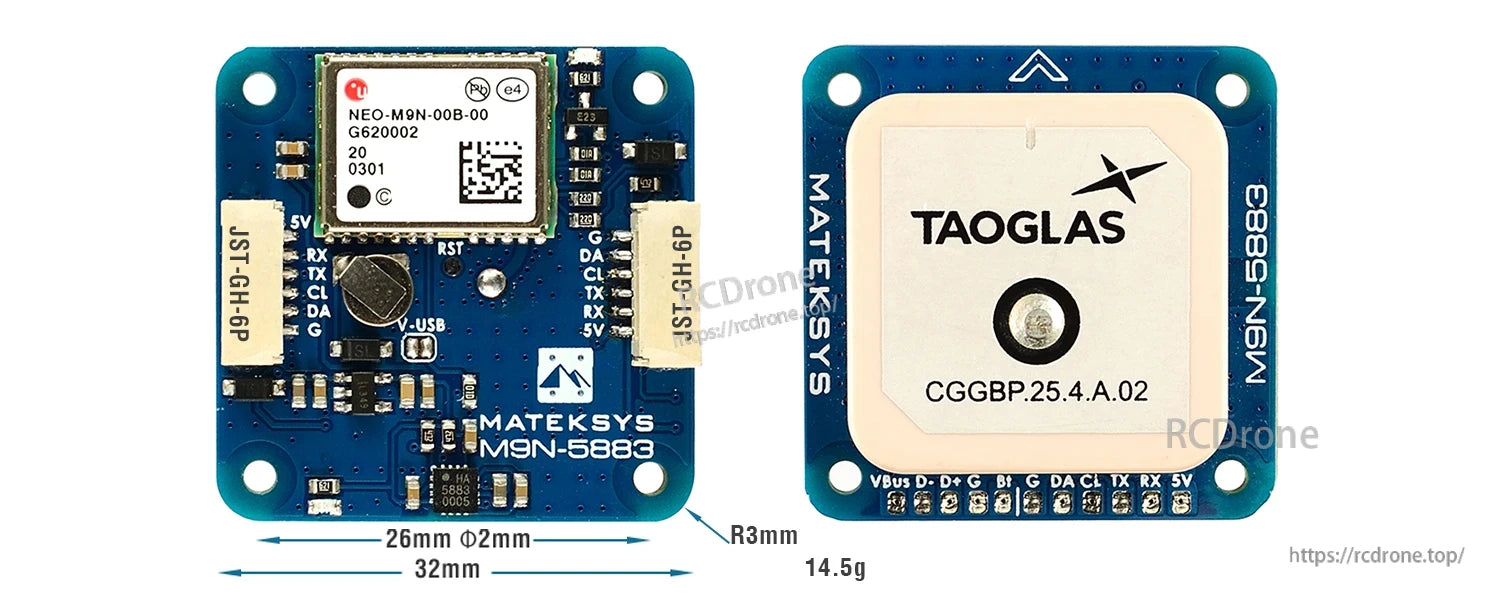
| Dimensi | 32mm*32mm*10mm |
| Berat | 14.5g |
| Butiran pemasangan (seperti yang ditunjukkan) | 26mm; diameter lubang: Φ2mm; R3mm |
Apa yang Termasuk
- 1x M9N-5883
- 1x JST-GH-6P ke JST-GH-6P 20cm wayar silikon
Penyambungan dan Tetapan
- M9N-5883 5V ke Pengawal penerbangan 4~5.5V
- M9N-5883 RX ke Pengawal penerbangan UART_TX
- M9N-5883 TX ke Pengawal penerbangan UART_RX
- M9N-5883 CL ke Pengawal penerbangan I2C_SCL
- M9N-5883 DA ke Pengawal penerbangan I2C_SDA
- M9N-5883 G ke Pengawal penerbangan GND
Petua dan Nota
-
Penyelarasan Kompas (pemasangan rata): Memiringkan magnetometer sangat tidak digalakkan!
- INAV/Betaflight: anak panah kompas ke depan, tetapkan CW 270° Flip apabila anak panah pengawal penerbangan menghadap ke depan.
- INAV/Betaflight: anak panah kompas ke belakang, tetapkan CW 90° Flip apabila anak panah pengawal penerbangan menghadap ke hadapan.
- ArduPilot/Mission Planner: Putaran Tiada.
- Jauhkan kompas/magnetometer 10cm dari talian kuasa/ESC/motor/bahan berasaskan besi.
- INAV 5.0.0, Betaflight 4.3.0, ArduPilot 4.3 atau lebih baru diperlukan.
- NEO-M9N, MAX-M10S, siri SAM-M10Q tidak mempunyai dataflash terbina dalam; setelah GNSS dimatikan dan superkapasitor habis, tetapan kembali kepada lalai.
- Protokol UBX adalah dua hala; firmware pengawal penerbangan boleh mengubah tetapan pada GPS melalui protokol UBX (tiada keperluan untuk menetapkan parameter modul GNSS dalam u-center).
- Dari GNSS FW3.01: timepulse diselaraskan dengan waktu UTC; waktu hanya sah selepas saat lompat dimuat turun (boleh mengambil masa sehingga 12.5 min). LED PPS mungkin tidak berkelip serta-merta selepas pembetulan 3D.
- Reset: menghubungkan pad “RST” ke Ground selama sekurang-kurangnya 100 ms akan memicu permulaan sejuk. RESET menghapus semua informasi dan memicu permulaan sejuk; gunakan hanya sebagai pilihan pemulihan jika pengkabelan/persediaan adalah betul tetapi pengawal tidak dapat mengesan modul GNSS.
- Calaran pada antena seramik adalah hasil daripada penyetelan antena.
Manual
- M9N-5883_step.zip
- Menyelesaikan isu berkaitan GPS: https://www.mateksys.com/?p=5712#tab-id-6
- u-center Windows
Butiran
MATEKSYS GNSS M9N-5883 menggabungkan penerima u-blox NEO-M9N dan kompas QMC5883L dengan sambungan UART dan I2C melalui port JST-GH 6-pin.
MATEKSYS M9N-5883 menggabungkan penerima GNSS u-blox NEO-M9N dan kompas 5883 pada papan 32mm dengan antena patch TAOGLAS dan penyambung JST-GH 6-pin.
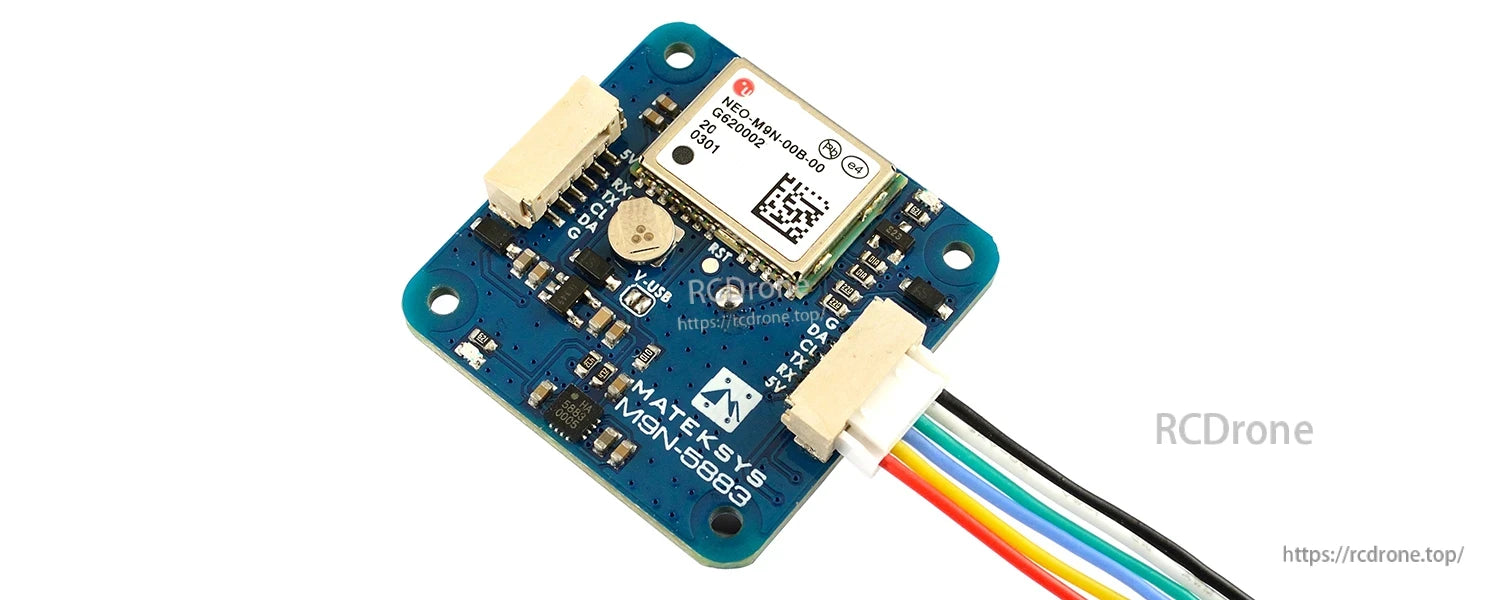
Modul GNSS dan kompas MATEKSYS M9N-5883 menggunakan susun atur papan yang padat dengan penyambung JST untuk pengkabelan GPS dan I2C yang mudah.
Related Collections