MFD Myflydream Crosshair AP - Pengawal penerbangan Crosshair AutoPilot sokongan AP baharu Osd CAN-BUS DAN Sistem Jarak Jauh TF untuk Drone Pesawat RC Pesawat
MFD Myflydream Crosshair AP - Pengawal penerbangan Crosshair AutoPilot sokongan AP baharu Osd CAN-BUS DAN Sistem Jarak Jauh TF untuk Drone Pesawat RC Pesawat
MyFlyDream
Tidak dapat memuatkan ketersediaan pengambilan
SPESIFIKASI AP MFD Myflydream Crosshair
Pangkalan roda: Plat Bawah
Gunakan: Kenderaan & Alat Mainan Kawalan Jauh
Tingkatkan Bahagian/Aksesori: Lain
Tingkatkan Bahagian/Aksesori: Penyesuai
Bekalan Alat: Memotong
Bekalan Alat: Lain
Parameter teknikal: KV1100
Saiz: 10*10*10
Peranti/Peranti Kawalan Jauh: Lain
Peranti/Peranti Kawalan Jauh: Pengawal Jauh
Syorkan Umur: 12+y
Bahagian & Aksesori RC: Sistem Radio
Asal: Tanah Besar China
Nombor Model: MFD Crosshair AP
Bahan: Logam
Atribut Pacuan Empat Roda: Himpunan
Untuk Jenis Kenderaan: Kapal Terbang
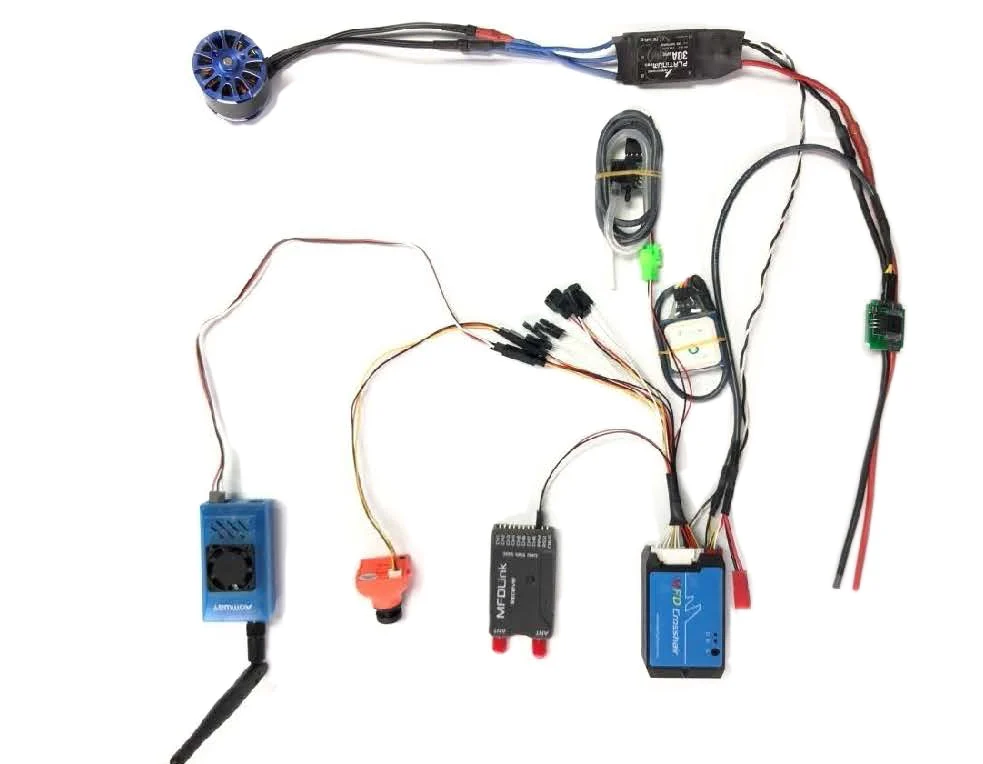
Myflydream MFD Crosshair Autopilot dengan Color HD OSD Myflydream 2019 AP Baharu Direka Khas untuk Skywallker X5 X7 X-UAV Talon
- 1.Myflydream Crosshair Autopilot
- 2.Modul GPS Cirocomm 580.
- 3.Penderia Kelajuan Udara
- 4.Penderia Arus 50A
- 5.Kabel Sambungan
- 6.Pengemaskini Perisian Tegar USB-TIL
OSD HD warna, algoritma kawalan penerbangan baharu, konfigurasi perkakasan yang lebih berkuasa, disertakan dengan GPS dan kelajuan udara.Ini ialah Myflydream Crosshair Autopilot baharu.
Autopilot Crosshair MFD mempunyai penderia terbina dalam untuk giroskop tiga paksi, pecutan tiga paksi, kompas elektronik tiga paksi dan barometer.Autopilot ini mempunyai pemproses khusus untuk mengira secara khusus sikap kawalan penerbangan, dan pemproses khusus lain mengendalikan imej OSD dan logik penerbangan.Berdasarkan perkakasan dan perisian ini, autopilot ini boleh digunakan untuk meningkatkan kestabilan pesawat, dan digunakan untuk mengawal pesawat supaya menjadikannya terbang mengikut laluan dan ketinggian yang direka untuk merealisasikan tujuan penerbangan automatik.
Spesifikasi:
- Berat: 30 gram
- Arus Penggunaan: <200ma@12V, disertakan GPS.
- Voltan Input: 7~26V, Syorkan untuk menggunakan 12V
- Input PWM: 7 input PWM, atau 8 input PPM, atau 16 input SBUS
- Output PWM: 10
- Kadar Sudut Gulungan Maksimum: 2000deg/s
- Mod Pengawal Penerbangan: MAN, STB, CIR, ALT, WPT, RTH
- Titik Jalan Maksimum: 20~200

Ciri-ciri:
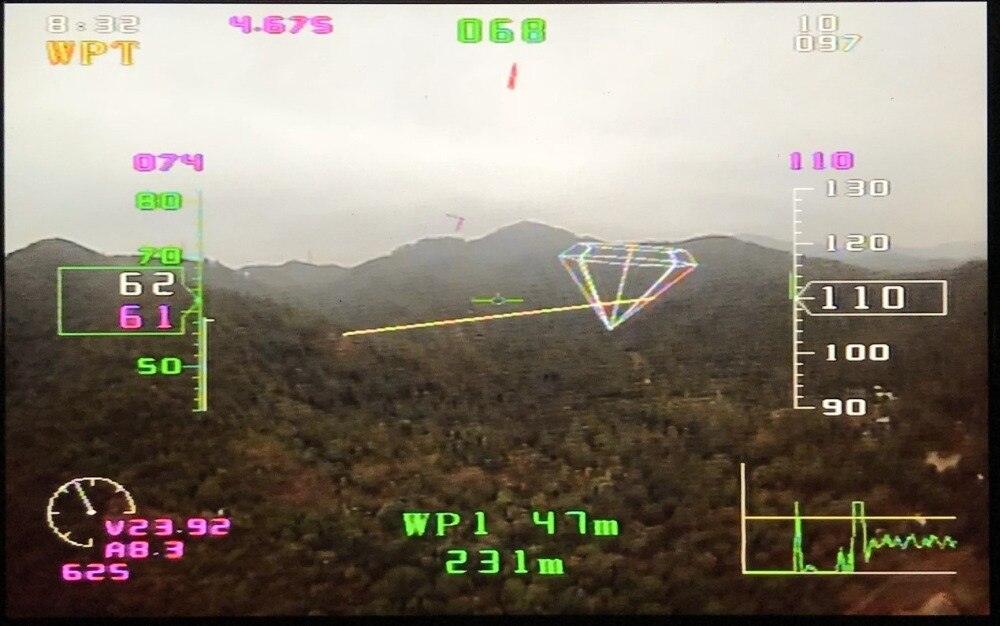
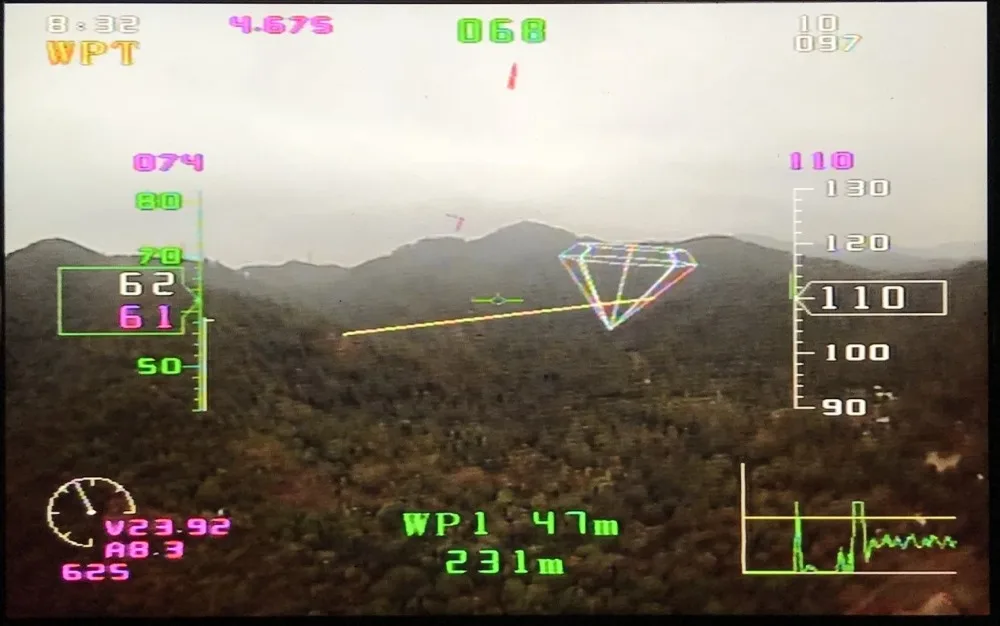
1.OSD warna resolusi tinggi, menyediakan antara muka penerbangan yang menarik perhatian dan menunjukkan dinamik penerbangan secara grafik.Pengguna juga boleh bertukar kepada antara muka OSD hitam dan putih tradisional.
2.Penjana isyarat video berwarna terbina dalam, mampu memaparkan antara muka OSD latar belakang hitam tanpa kamera luaran.
3.Menyokong menu dwibahasa Cina/Inggeris, lebih mudah digunakan.
4.Algoritma kawalan PID lata baharu, secara langsung mengawal kadar roll pesawat.Bertindak balas lebih pantas untuk permukaan kemudi, lebih stabil untuk kawalan penerbangan dan lebih lancar untuk peralihan sikap.
5.Kestabilan dan keserasian yang lebih baik, mengurangkan gangguan penghantaran data kuasa tinggi, serasi dengan pelbagai kamera.
6.Sokongan yang lebih komprehensif kepada protokol MAVLink.Pengguna bukan sahaja boleh menggunakan perisian stesen tanah MFD, tetapi juga menggunakan bacaan/tetapan parameter MissionPlanner untuk perancangan laluan, penerbangan titik laluan dsb.
7.Mengguna pakai paparan realiti tambahan yang menjadikan objek rangka wayar 3D dalam OSD berdasarkan sikap dan kedudukan pesawat.Sebagai contoh, titik laluan maya yang hampir tiba boleh dipaparkan pada skrin, kedudukan relatif dan ketinggian pesawat lain boleh ditunjukkan oleh model 3D dengan warna yang berbeza.
8.Keupayaan penerbangan yang tepat.Laluan penerbangan boleh dirancang di stesen tanah, dan ia menyokong kawalan pencetus pengatup kamera yang boleh digunakan untuk tujuan tinjauan udara.

9.Serasi dengan kedua-dua versi baharu dan lama MFD AAT.

11.Kawalan pendikit yang lebih tepat, turun naik kelajuan yang kurang dan kecekapan penerbangan yang lebih tinggi.
12.Fungsi berlepas automatik yang dioptimumkan, hanya goncangkan motor pemula pesawat apabila pencetus berfungsi.Jauh lebih selamat dan mudah digunakan.
13.Fungsi pendaratan automatik akan tersedia tidak lama lagi.
14.Konfigurasi perkakasan yang sangat kaya dengan keupayaan naik taraf dan pengembangan yang berkuasa.
15.Didatangkan dengan tiga mikropemproses berprestasi tinggi yang mengendalikan resolusi sikap, kawalan penerbangan dan pemprosesan isyarat video secara berasingan.
16.Kebolehpercayaan yang lebih baik dengan dwi giroskop dan dwi pecutan.
17.Prestasi penerbangan ketinggian tetap telah dioptimumkan dengan barometer baharu.
18.Tujuh input PWM.PWM ke-7 serasi dengan kedua-dua input PPM dan SBUS.
19.10 PWM output, menyediakan sumber perkakasan yang mencukupi untuk sayap komposit VTOL, kawalan pengatup kamera tinjauan udara dan putaran kamera dsb.
20.Selain GPS dan port penghantaran data, terdapat dua port bersiri tambahan untuk sambungan sensor luaran.
21.Menyokong antara muka data CAN-BUS, lebih mudah untuk memanjangkan peranti.
22.Menyokong bacaan kad TF, lebih mudah untuk membaca log penerbangan dan fail POS.



'
Related Collections