

MUWEIDU L6020 Motor 24V 200rpm Motor Servo dengan Pengekod 18-bit, RS485/CAN, Tork Dinilai 0.58N.m
MUWEIDU L6020 Motor 24V 200rpm Motor Servo dengan Pengekod 18-bit, RS485/CAN, Tork Dinilai 0.58N.m
MUWEIDU
Tidak dapat memuatkan ketersediaan pengambilan
Tinjauan
MUWEIDU Motor L6020 adalah motor DC tanpa berus berkelajuan rendah dan ketepatan tinggi motor servo yang direka untuk kawalan kelajuan/posisi. Ia mengintegrasikan pengod kod mutlak satu putaran 18-bit dan menyokong komunikasi CAN atau RS485 untuk sistem robotik dan automasi yang memerlukan operasi yang stabil dan lancar. Untuk pemilihan produk atau sokongan teknikal, hubungi [email protected] or lawati https://rcdrone.top/.
Ciri Utama
- Motor DC tanpa berus berkelajuan rendah & siri ketepatan tinggi
- Reka bentuk poros berongga
- Operasi yang stabil & dan lancar
- Ketepatan tinggi yang terintegrasi; pembinaan ringan; prestasi tork tinggi
- Memenuhi keperluan kawalan kedudukan berkelajuan rendah dan ketepatan tinggi
- Bahan teras motor: lembaran keluli silikon premium dan magnet kekal berprestasi tinggi yang tahan suhu tinggi
- Reka bentuk rotor luar pelbagai peringkat yang diratakan untuk tork yang lebih tinggi dalam aplikasi yang terhad ruang
- Struktur tanpa berus digabungkan dengan galas berprestasi tinggi untuk putaran yang lebih lancar dan jangka hayat yang lebih lama
- Resistor aloi ketepatan tinggi dengan pengaliran suhu rendah untuk pengambilan dan kawalan arus yang tepat
- Penggerak jambatan penuh tiga fasa N-saluran penuh dengan rintangan dalaman rendah dan output arus tinggi
- Menyokong pertukaran lancar antara mod kawalan tork terbuka, kelajuan, dan kedudukan
- Kawalan utama: MCU 32-bit dengan frekuensi operasi 72 MHz
- Voltan input: 12~60 V (pemacu)
- Kalibrasi sekali, kedudukan sifar tidak pernah hilang
- Disahkan CE (seperti yang dinyatakan)
Spesifikasi
| Model | L6020 |
| Voltan Dinilai | 24V |
| Arus Dinilai | 1.4A |
| Kuasa Puncak | 12.6W |
| Tork Dinilai | 0.58N.m |
| Tork Puncak | 1.4N.m |
| Kelajuan Dinilai | 200rpm |
| Pengodak | 18bit |
| Inersia Rotor | 394gcm² |
| Pemantauan Suhu Motor | YA |
| Mod Kawalan | Kelajuan/Posisi |
| Protokol Komunikasi | RS485 atau CAN |
| Dimensi Keseluruhan | Φ58mm×21mm |
| Berat | 185g |
Definisi Antara Muka
- SWITCH ID
- CAN/RS485
- B/L: RS485-B atau CAN-L
- A/H: RS485-A atau CAN-H
- V-: Bekalan Kuasa Negatif
- V+: Bekalan Kuasa Positif
- T: Pemancar UART
- R: Penerima UART
- G: GND Isyarat
Skenario Aplikasi
- Robot Humanoid
- Lengan Robot
- Exoskeleton
- Robot Berkaki Empat
- Kenderaan AGV
- Robot ARU
- Kamera 360°
- Kamera Tangan
- LiDAR
- Gimbal
Perisian PC / Mod Kawalan (seperti yang dinyatakan)
Penyetelan / pengujian parameter berasaskan PC / peningkatan firmware tersedia.Serasi dengan platform pembangunan sumber terbuka termasuk PC, MCU, PLC, komputer industri dan Raspberry Pi.
- Mod Tork
- Mod Kelajuan
- Mod Kawalan Multi-Putar
- Mod Posisi + Arah Single-Putar
- Mod Posisi Inkremental
- Mod Kawalan Multi-Putar (dengan had kelajuan)
- Mod Posisi + Arah Single-Putar (dengan had kelajuan)
- Mod Posisi Inkremental (dengan had kelajuan)
Manual / Fail
Butiran

Direka untuk kawalan gerakan berkelajuan rendah dan ketepatan tinggi dengan faktor bentuk poros berongga yang padat.

Pembinaan teras memberi tumpuan kepada putaran yang lancar dan kawalan arus yang tepat untuk prestasi penentuan kedudukan yang stabil.
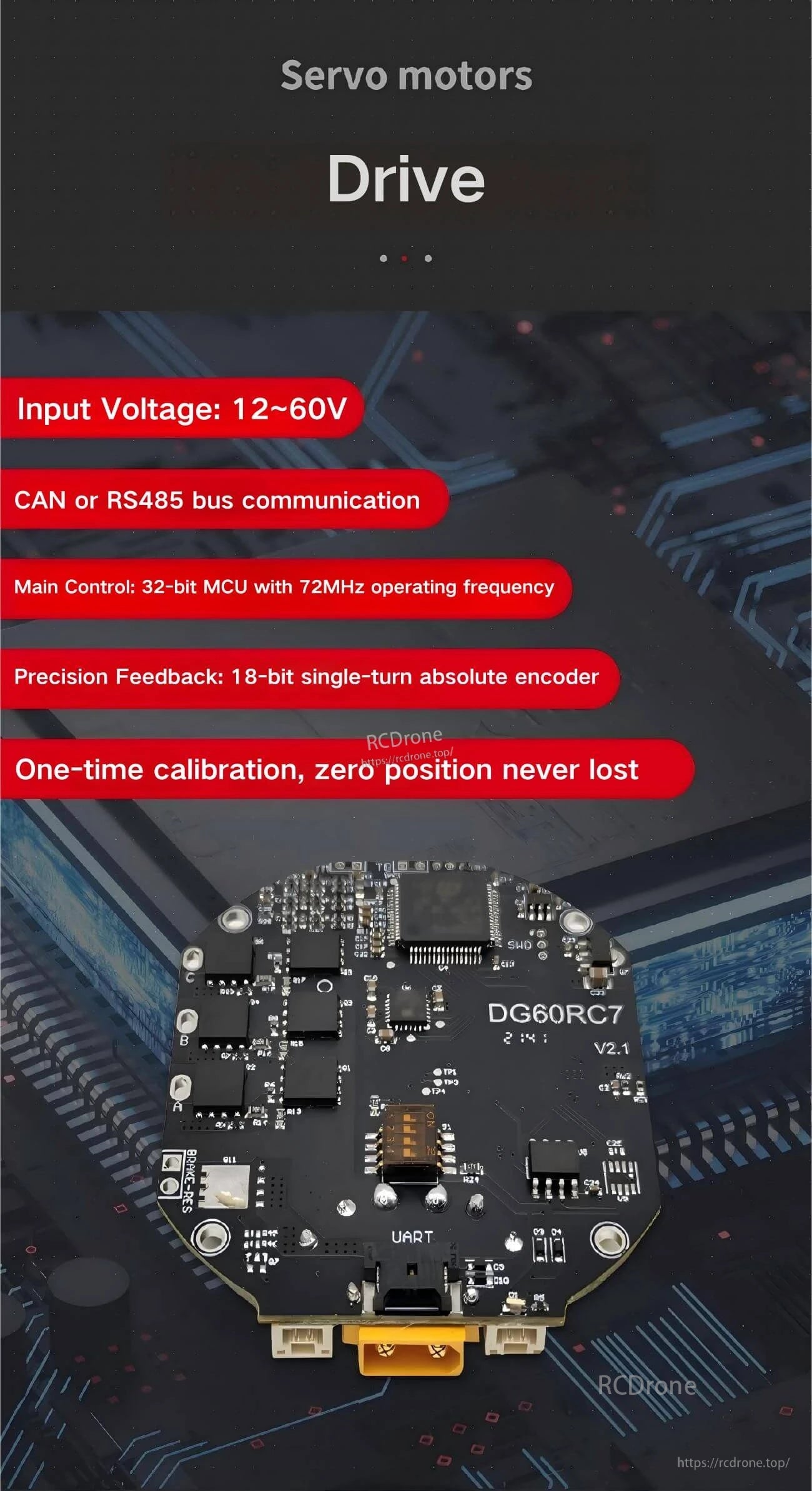
Elektronik pemacu terbina dalam menyokong kawalan bas CAN atau RS485 dengan maklum balas pengod 18-bit mutlak.

Pemilihan antara muka yang jelas membantu menyambungkan kuasa, UART, dan sambungan CAN/RS485 dengan betul.
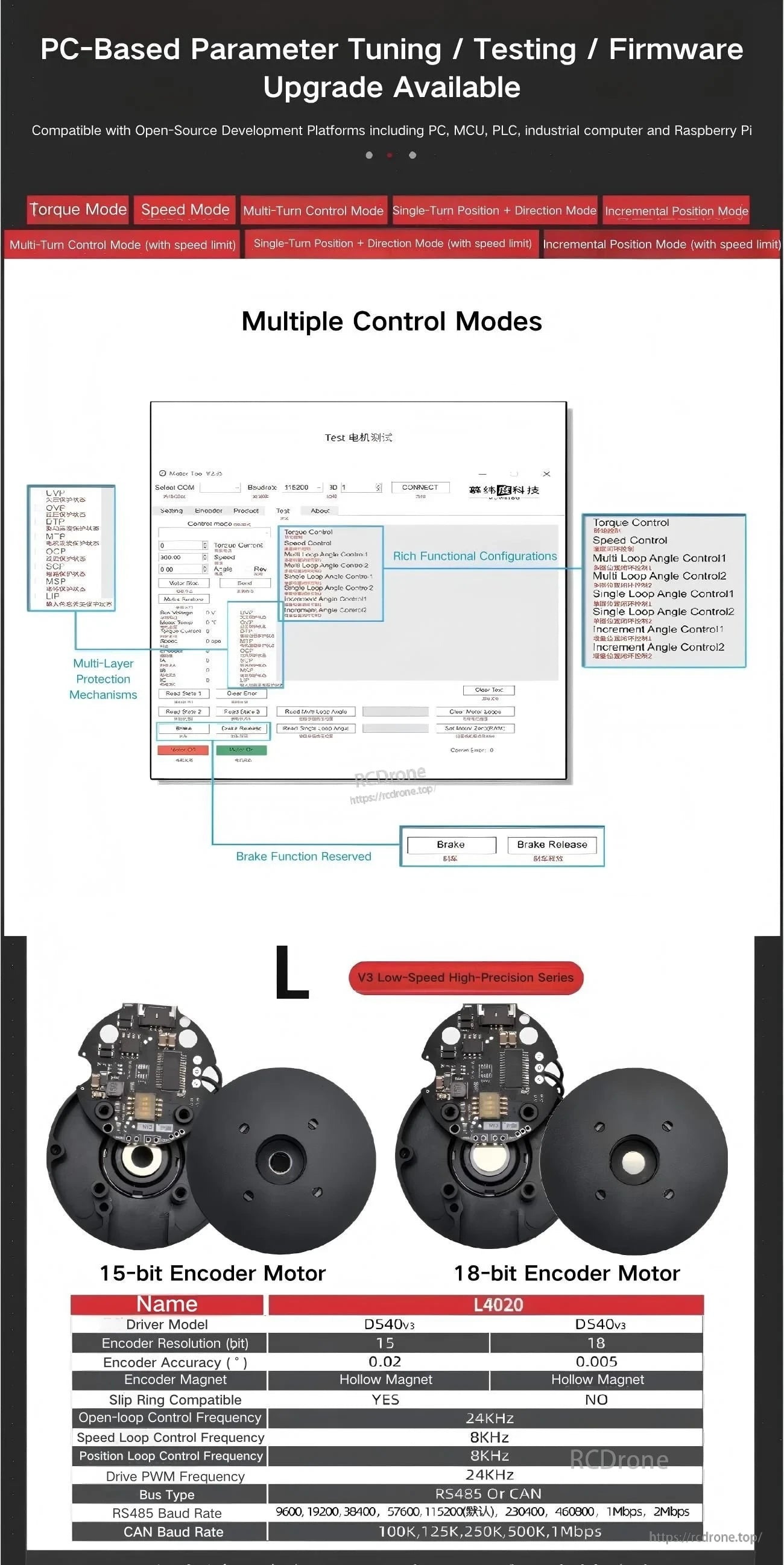
Perisian PC membolehkan penyetelan parameter, pengujian, dan peningkatan firmware merentasi mod kawalan tork, kelajuan, dan kedudukan.
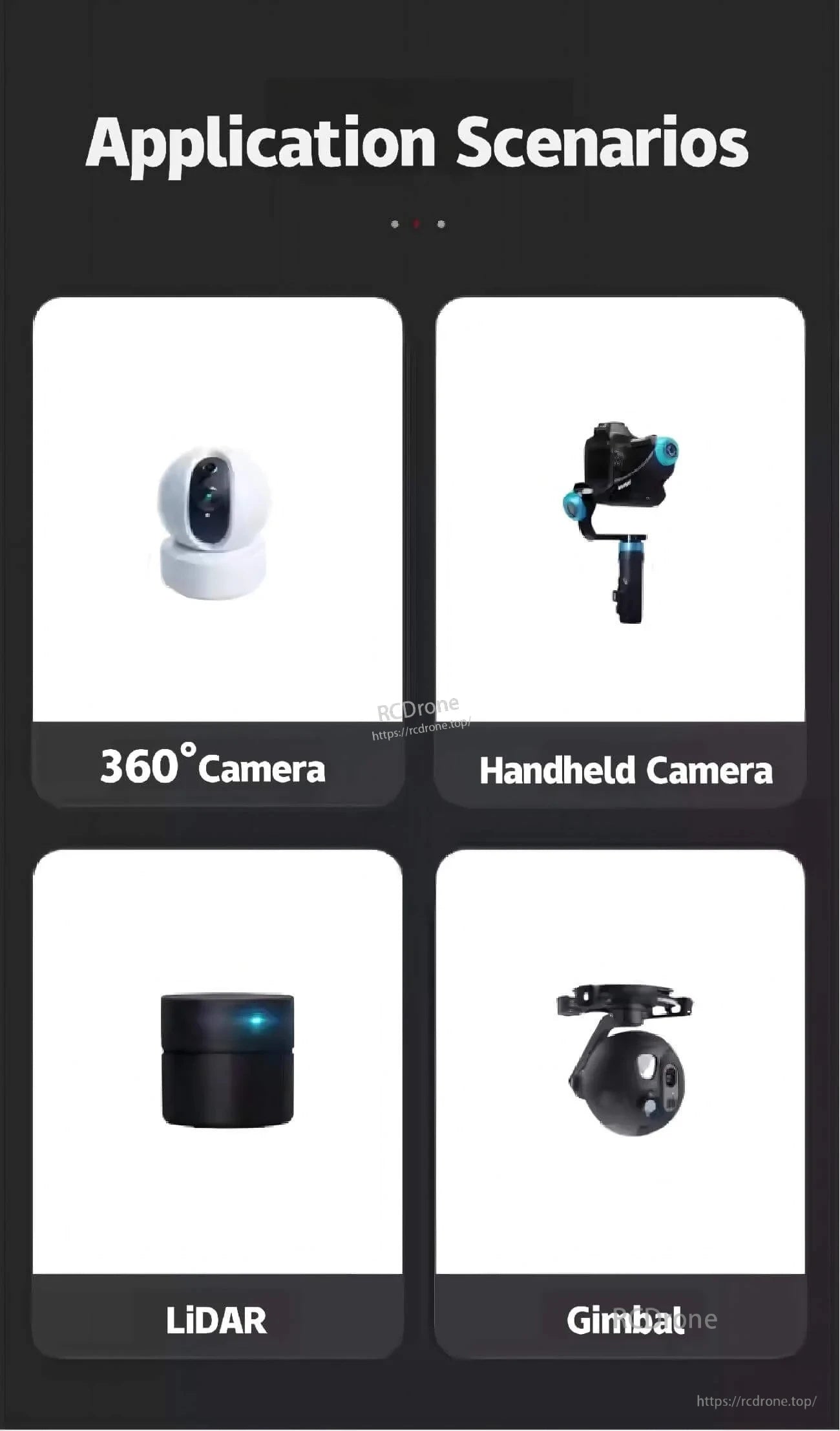
Sesuaian praktikal untuk binaan mekatronik kompak seperti gimbal, kamera 360°, dan modul LiDAR.
Related Collections

