






Modul Sendi Robot Harmonik Berongga MyActuator RH-32, 48V, Tork Puncak 229Nm, Pengekod Dwi 17-Bit, CAN BUS & Kawalan EtherCAT
Modul Sendi Robot Harmonik Berongga MyActuator RH-32, 48V, Tork Puncak 229Nm, Pengekod Dwi 17-Bit, CAN BUS & Kawalan EtherCAT
MyActuator
Tidak dapat memuatkan ketersediaan pengambilan
Overview
Modul MyActuator RH-32 Hollow Harmonic Robot Joint adalah aktuator berkuasa tinggi dan ketepatan tinggi yang direka untuk lengan robot, robot humanoid, dan sistem automasi kolaboratif. Dengan nisbah gear 100:1, voltan input 48V, dan 229 N·m tork puncak, RH-32 memastikan prestasi yang luar biasa untuk aplikasi yang memerlukan gerakan lancar, kawalan tepat, dan kapasiti beban yang tinggi. Dengan sokongan untuk pengodak dwi (input/output 17-bit), komunikasi CAN BUS & EtherCAT, dan reka bentuk poros berongga, ia berintegrasi dengan lancar ke dalam sistem robotik yang canggih.
Ciri Utama
-
Prestasi Tork Tinggi – Menyampaikan sehingga 150 N·m tork yang dinilai dan 229 N·m tork puncak, ideal untuk sendi robotik berat.
-
Pengawalan Ketepatan – Dwi 17-bit pengodak memastikan maklum balas yang tepat dan kebolehulangan <0.01°.
-
Komunikasi Pelbagai Guna – Menyokong CAN BUS dan EtherCAT untuk integrasi sistem yang boleh dipercayai dan fleksibel.
-
Kapasiti Beban yang Kukuh – Menangani sehingga 342.6 kN beban statik paksi dan 81.6 kN beban dinamik paksi.
-
Reka Bentuk Berongga Kompak – Memudahkan pengaturan kabel melalui sendi untuk penyediaan robotik yang lebih bersih dan selamat.
-
Kebolehpercayaan Tinggi – Dinilai gred penebat F dan reka bentuk penyejukan haba yang maju untuk ketahanan industri.
Spesifikasi Teknikal
| Parameter | Unit | Nilai |
|---|---|---|
| Nisbah Gear | — | 100 |
| Voltan Masukan | V | 48 |
| Kelajuan Tanpa Beban | RPM | 20 |
| Arus Tanpa Beban | A | 2.8 |
| Kelajuan Dinilai | RPM | 18 |
| Tork Dinilai | N·m | 150 |
| Kuasa Dinilai | W | 282 |
| Arus Dinilai | A(rms) | 21.8 |
| Tork Puncak | N·m | 229 |
| Arus Puncak | A(rms) | 32.1 |
| Konstanta Back-EMF Motor | Vdc/Krpm | 26.7 |
| Konstanta Tork Modul | N·m/A | 6.9 |
| Rintangan Fasa Motor | Ω | 0.08 |
| Induktans Fasa Motor | mH | 0.18 |
| Pasangan Kutub | — | 10 |
| Sambungan 3 Fasa | — | Y |
| Backlash | Arcsec | < 40 |
| Beban Radial (Statik/Dinamik) | kN | 65.4 / 38.2 |
| Beban Aksial (Statik/Dinamik) | kN | 342.6 / 81.6 |
| Inersia (N/B) | kg·m² | 6.86 / 8.32 |
| Jenis Pengodok | — | Pengodok Dwi ABS-17BIT (Input/Output) |
| Ketepatan Ulang Posisi | Darjah | < 0.01 |
| Komunikasi | — | CAN BUS & EtherCAT |
| Berat (N/B) | Kg | 4.32 / 4.74 |
| Gred Penebat | — | F |
Deskripsi Antara Muka
RH-32 menyokong komunikasi EtherCAT dan CAN, menyediakan kawalan masa nyata yang boleh dipercayai.
-
EtherCAT: Komunikasi deterministik berkelajuan tinggi untuk automasi industri.
-
CAN BUS: Komunikasi yang fleksibel dan stabil untuk sistem multi-sendi yang kompleks.
-
Penyesuai khusus untuk kuasa, maklum balas, dan isyarat kawalan memastikan integrasi yang selamat dan efisien.
Maklumat Pembungkusan
-
Dimensi Kotak: 165mm × 165mm × 127mm
-
Aksesori yang Disertakan:
-
Kabel Bekalan Kuasa × 2
-
Kabel Komunikasi CAN BUS × 2
-
Kabel Resistor Bleeder × 1
-
Kabel Bateri Multi-putaran × 1
-
Resistansi Terminal 120Ω × 1
-
Kabel Komunikasi EtherCAT × 2
-
Modul Komunikasi CAN BUS × 1 (dengan penyesuai USB-CAN percuma)
- MyActuator Modul Sendi Robot RH-32-100 x 1
-
Aplikasi
-
Robot kolaboratif (cobot)
-
Robot humanoid dan perkhidmatan
Manipulator industri
-
Kenderaan pandu automatik (AGV)
-
Sistem penentuan kedudukan tepat
Butiran
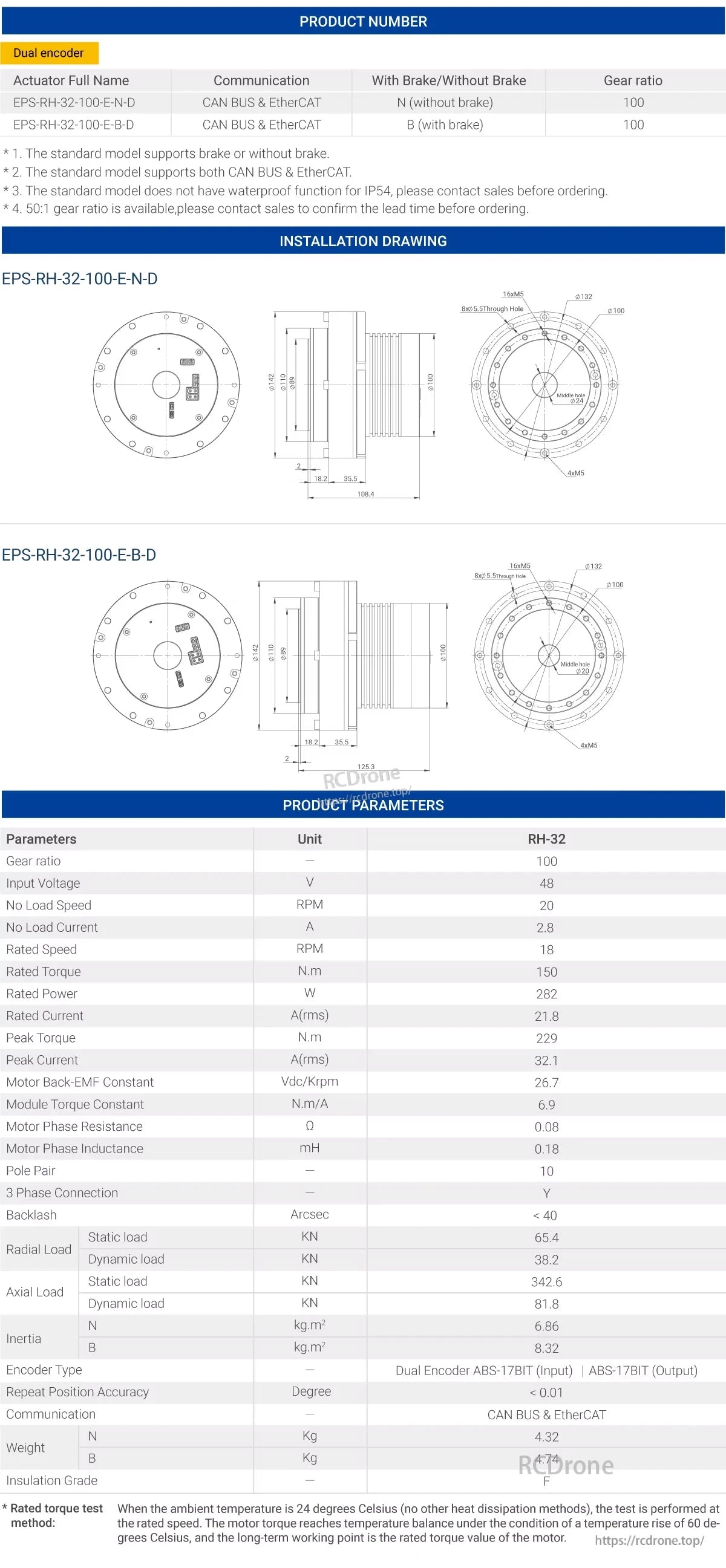
Sendi robot RH-32 menawarkan pengodok dwi, CAN BUS/EtherCAT, nisbah gear 100:1, 48V, 150 N.m tork, 21.8 A semasa. Brek pilihan, IP54 tersedia.
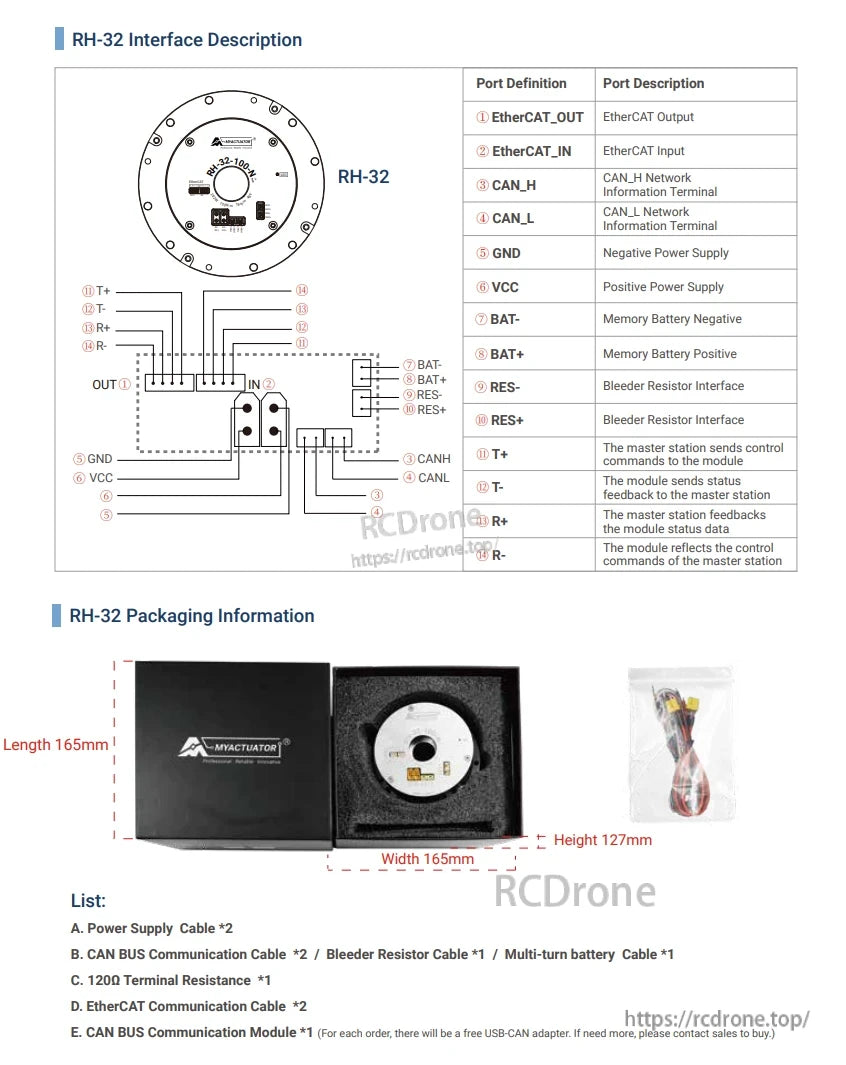
Sendi robot RH-32 mempunyai antara muka EtherCAT dan CAN, definisi port, dimensi 165x165x127mm. Termasuk kabel, rintangan terminal, modul CAN.
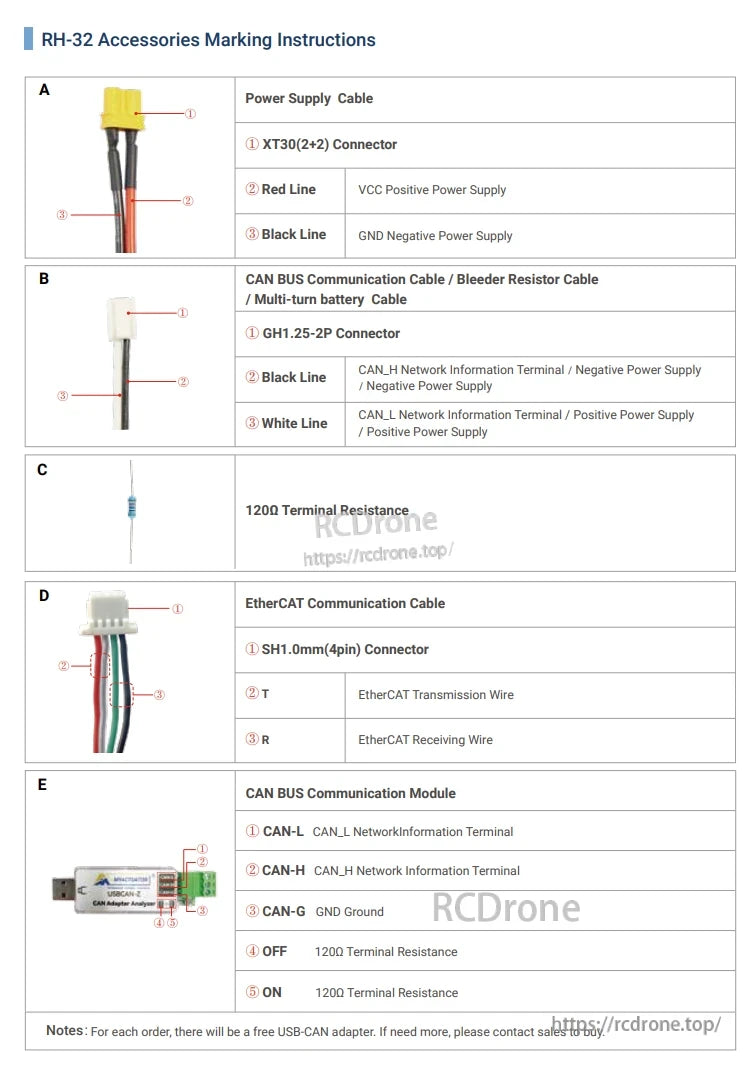
Aksesori RH-32 termasuk kuasa, kabel CAN BUS, kabel EtherCAT, rintangan 120Ω, dan modul CAN. Butiran merangkumi penyambung, fungsi wayar, dan rintangan terminal untuk pemasangan dan komunikasi yang betul. Penyesuai USB-CAN percuma disertakan dengan setiap pesanan.
Related Collections






