






MyActuator RMD-X4-10 Penggerak Planetari 10N·m Pengekod Berkembar EtherCAT+CAN Pemacu Sendi Robot
MyActuator RMD-X4-10 Penggerak Planetari 10N·m Pengekod Berkembar EtherCAT+CAN Pemacu Sendi Robot
MyActuator
Tidak dapat memuatkan ketersediaan pengambilan
Overview
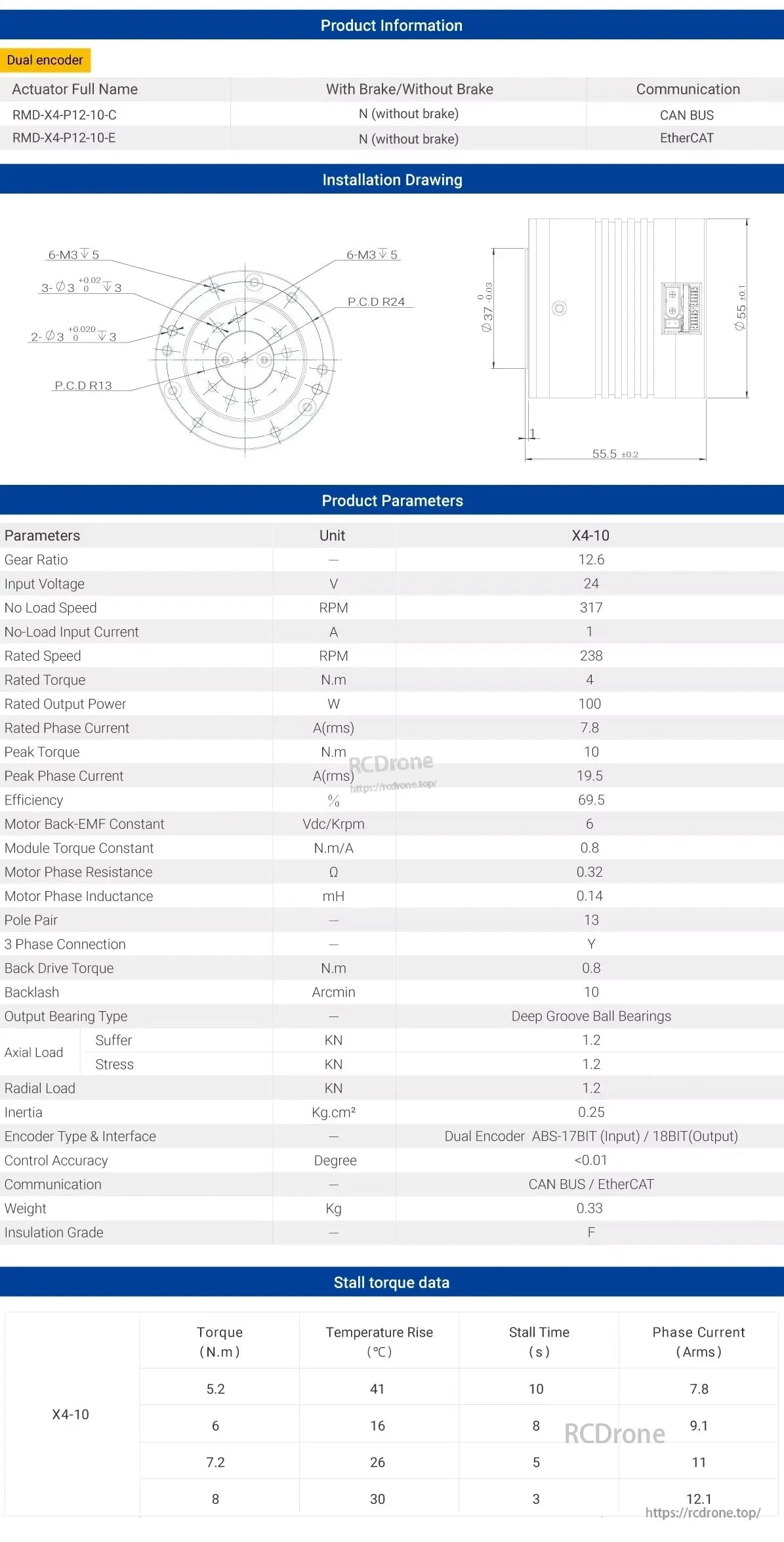
Aktuator MyActuator RMD-X4-10 planetari adalah modul motor DC berprestasi tinggi yang direka untuk aplikasi robotik yang maju. Dengan nisbah gear planetari 12.6:1, tork puncak 10N·m, dan kuasa output yang dinilai 100W, ia mengintegrasikan sistem pengodak dwi (input 17-bit / output 18-bit) yang memberikan pengawalan ketepatan 0.01°. Struktur hollow besar menyokong integrasi pelbagai sensor, membolehkan pusat kawalan untuk pengawalan postur badan penuh dalam robot humanoid. Dengan komunikasi dwi-protokol EtherCAT dan CAN, aktuator mencapai respons ultra-pantas 250μs, menjadikannya ideal untuk senario dinamik tinggi dan kebolehpercayaan tinggi seperti robot humanoid, pemacu kaki bionik, dan automasi industri.
Ciri Utama
-
Pengodak Dwi Ketepatan Tinggi: input 17-bit / output 18-bit dengan 0.01° ketepatan
-
Tork Puncak 10N·m dengan nisbah gear planet 12.6:1
-
Galas Roller Melintang: Keupayaan anti-bengkok yang luar biasa untuk sendi robot yang stabil
-
EtherCAT + CAN Bus Komunikasi Dwi: Menyokong pautan pelbagai mesin, respons ultra-pantas 250μs
-
Struktur Berongga Besar: Membolehkan integrasi sensor, kabel, dan cincin gelincir untuk sistem robot yang kompleks
-
Kebolehpercayaan Tinggi: Direka untuk kawalan langkah humanoid, peralihan yang lancar untuk berlari, melompat, dan gerakan kompleks
-
Kompat dan Ringan: Φ55mm × 55.5mm, berat 0.33kg
Spesifikasi
| Parameter | Nilai |
|---|---|
| Model | RMD-X4-10 |
| Nisbah Gear | 12.6:1 |
| Voltan Masukan | 24V DC |
| Kelajuan Dinilai | 238 RPM |
| Kelajuan Tanpa Beban | 317 RPM |
| Kuasa Keluaran Dinilai | 100W |
| Tork Dinilai | 4N·m |
| Tork Puncak | 10N·m |
| Arus Dinilai | 7.84A |
| Arus Tanpa Beban | 1A |
| Jenis Pengodak | Pengodak Dwi (ABS-17bit / 18bit) |
| Komunikasi | EtherCAT + CAN Bus |
| Berat | 0.33kg |
| Saiz | Ø55mm × 55.5mm |
Permohonan
-
Robot Humanoid – Penggerak sendi untuk lengan, kaki, dan torso
-
Penggerak Kaki Bionik – Tork tinggi dengan reka bentuk anti-bengkok untuk gaya lari dan melompat
-
Robot Kolaboratif – Kawalan gerakan lancar untuk automasi industri
-
Exoskeleton – Penggerak ringan dan dinamik tinggi untuk peranti bantuan manusia
-
Barisan Pengeluaran Fleksibel – Penyelarasan pelbagai paksi melalui komunikasi berkelajuan tinggi EtherCAT
Pembungkusan & Aksesori
-
Bekalan Kuasa + Kabel Komunikasi CAN Bus ×1
-
120Ω Rintangan Terminal ×1
Kabel Komunikasi EtherCAT ×2
-
Modul Komunikasi CAN Bus ×1 (penyesuai USB-CAN termasuk setiap pesanan)
Dimensi Pembungkusan: 100mm × 100mm × 70mm
Butiran

RMD-X4-PT2.5-10-C pemacu sendi robot pengodok dwi dengan input 24V, nisbah gear 12.6, tork 4N·m, dan output 100W. Ciri-ciri termasuk antara muka CAN BUS/EtherCAT, kelajuan tanpa beban 317RPM, dan berat 0.28kg. Termasuk dimensi pemasangan dan spesifikasi teknikal.

Penggerak planetari dengan tork puncak 10N.m, nisbah gear 12.6:1, berat 0.33kg. Saiz: Ø55mm×55.5mm. Ciri-ciri termasuk komunikasi EtherCAT/CANBUS, dwi pengodok, MCU berkelajuan tinggi, cip CAN, dan galas bola alur dalam.

Dwi Pengodok ABS-17BIT Input / 18BIT Output, X4-10, SN:40225621, MYACTUATOR

Penggerak Planetari RMD-X4-10 MYACTUATOR menawarkan kuasa 100W, tork 46Nm, dwi pengodok, kelajuan 238rpm. Dilengkapi dengan kabel kuasa + CAN BUS, resistor 120Ω, kabel EtherCAT, modul CAN BUS, dan penyesuai USB-CAN percuma.
Penggerak Planetari Robotik RMD-X4-10 memiliki dwi pengodok, 12.6 nisbah gear, input 24V, output 100W, dan CAN BUS/EtherCAT. Ia memberikan tork 4N.m, kelajuan 238 RPM, berat 0.33kg, dan menggunakan galas bola alur dalam untuk kecekapan tinggi.

Antaramuka X4-10 merangkumi port kuasa, CAN, dan EtherCAT. Pembungkusan mengandungi bekalan kuasa, kabel, rintangan, dan modul. Dimensi: 100x100x70mm. Termasuk penyesuai USB-CAN dengan setiap pesanan.

Aksesori X4-10 termasuk bekalan kuasa, kabel CAN BUS dan EtherCAT, rintangan terminal, dan modul CAN BUS. Butiran merangkumi penyambung, fungsi wayar, garis isyarat, dan nota penyesuai USB-CAN.
Related Collections






